









论文解读:(TransD)Knowledge Graph Embedding via Dynamic Mapping Matrix
知识图谱作为人工智能应用的重要资源,表示学习对知识图谱的完善和应用至关重要。先前提出的TransE、TransH、TransR模型对表示学习提升不少,表示学习对关系抽取、三元组分类以及链接预测等方面具有作用。TransD模型改进TransR,认为不同的实体应映射到不同的语义空间中,且减少了计算量。
一、简要信息
| 序号 | 属性 | 值 |
|---|---|---|
| 1 | 模型名称 | TransD |
| 2 | 所属领域 | 自然语言处理 |
| 3 | 研究内容 | 知识表示 |
| 4 | 核心内容 | knowledge embedding |
| 5 | GitHub源码 | https://github.com/mrlyk423/relation_extraction 或 https://github.com/thunlp/KB2E |
| 6 | 论文PDF | https://www.aclweb.org/anthology/P15-1067.pdf) |
二、摘要与引言
知识图谱对于大量的人工智能应用来说是非常有用的资源,但是其距离完善还有一段距离。先前的工作例如TransE、TransH和TransR,认为头实体到尾实体可以被认为是一种翻译,且CTransR获得最优效果。本文,我们提出一个细粒度模型,叫TransD,且相比之前的模型有所提高。在TransD中,我们使用两个两个想来来表征两个实体(头实体和尾实体)。首先第一个向量表征实体关系,另一个被用来构建动态映射矩阵。相比TransR/CTransR模型,TransD不仅考虑到关系的多样性,也考虑到实体的多样性。TransD有较少的参数,且TransD参数较少,没有矩阵向量乘法运算,可以应用于大型图数据。实验中,我们在两个标准任务上评估了我们的模型。评估的结果表明我们的方法比最优模型更好。
像WordNet、FreeBase、YaGo一样的知识图谱在许多AI应用,例如关系抽取、问答等。这些通常包含大量的结构化数据,形如
(
h
e
a
d
e
n
t
i
t
y
,
r
e
l
a
t
i
o
n
,
t
a
i
l
e
n
t
i
t
y
)
(head entity, relation, tail entity)
(headentity,relation,tailentity)即
(
h
,
r
,
t
)
(h,r,t)
(h,r,t) 。TransR模型包含如下几个缺点:
(1)对于特定的关系
r
r
r ,所有实体共享同一个语义空间
M
r
M_r
Mr 。因此实体需要映射到不同的语义空间中;
(2)实体和关系的投影操作是一个连续迭代的操作,仅依靠关系进行推理是不足的;
(3)矩阵向量带来大量的参数运算量。
三、相关工作与主要贡献
相关工作部分由于和TransH文章一样,请直接阅读【TransH】的相关工作部分。
四、算法模型详解(TransD)
本文提出一种全新的方法TransD来为图谱进行建模。如图所示
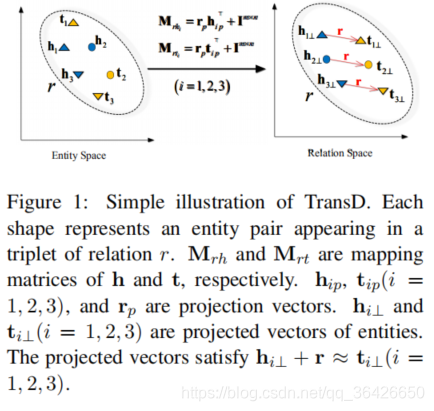
我们定义了两个向量,第一个向量表征实体或关系的语义,另一个向量(投影向量)表示如何将实体从实体空间映射到关系空间中,因此每个实体对有唯一的矩阵。 M r h , M r t \mathbf{M}_{rh},\mathbf{M}_{rt} Mrh,Mrt 分别是实体 h , t h,t h,t 的映射矩阵, h i p , t i p ( i = 1 , 2 , 3 ) \mathbf{h}_{ip}, \mathbf{t}_{ip}(i=1,2,3) hip,tip(i=1,2,3) 及关系 r p \mathbf{r}_p rp 为投影向量, h i ⊥ , t i ⊥ \mathbf{h}_{i\perp},\mathbf{t}_{i\perp} hi⊥,ti⊥ 分别为头尾实体的投影向量。因此有:
M r h = r p h p T + I m × n \mathbf{M}_{rh}=\mathbf{r}_p\mathbf{h}_{p}^{\mathbf{T}}+\mathbf{I}^{m\times n} Mrh=rphpT+Im×n
M r t = r p t p T + I m × n \mathbf{M}_{rt}=\mathbf{r}_p\mathbf{t}_{p}^{\mathbf{T}}+\mathbf{I}^{m\times n} Mrt=rptpT+Im×n
h ⊥ = M r h h \mathbf{h}_{\perp}=\mathbf{M}_{rh}\mathbf{h} h⊥=Mrhh
t ⊥ = M r t t \mathbf{t}_{\perp}=\mathbf{M}_{rt}\mathbf{t} t⊥=Mrtt
f r ( h , t ) = − ∣ ∣ h ⊥ + r − t ⊥ ∣ ∣ 2 2 f_r(\mathbf{h},\mathbf{{t})=-||\mathbf{h}_{\perp}+\mathbf{r}-\mathbf{t}_{\perp}}||_2^2 fr(h,t)=−∣∣h⊥+r−t⊥∣∣22
分析上式,实体投影矩阵主要与当前实体对中的关系和实体有关,相比TransR模型,每个实体所在的投影空间不相同。损失函数如下所示:
L = ∑ ( h , r , t ) ∈ S ∑ ( h ′ , r , t ′ ) ∈ S ′ [ γ + f r ( h , t ) − f r ( h ′ , t ′ ) ] + L=\sum_{(h,r,t)\in S}\sum_{(h',r,t')\in S'}[\gamma + f_r(h,t)-f_r(h',t')]_+ L=(h,r,t)∈S∑(h′,r,t′)∈S′∑[γ+fr(h,t)−fr(h′,t′)]+
负采样的策略与TransH和TransR相同。
五、实验及分析
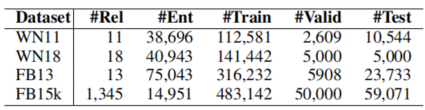
数据集包括四个,分别如图所示:
实验包括两个部分:
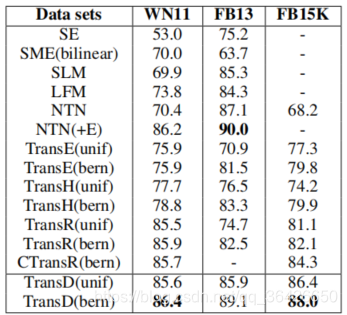
(1) 三元组分类:任务给定三元组,判定当前三元组是否正确。实验结果如图所示:
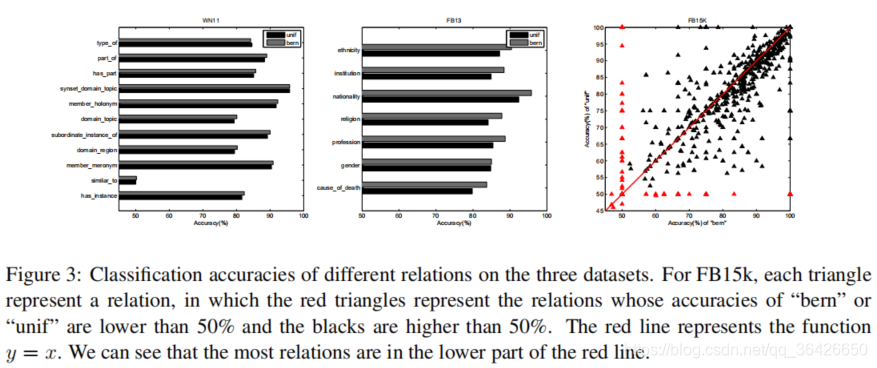
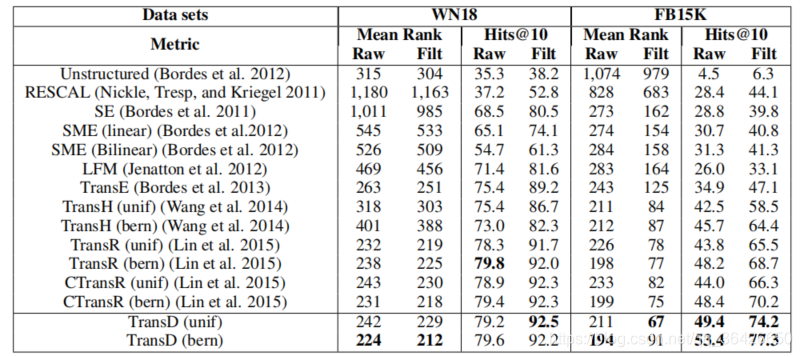
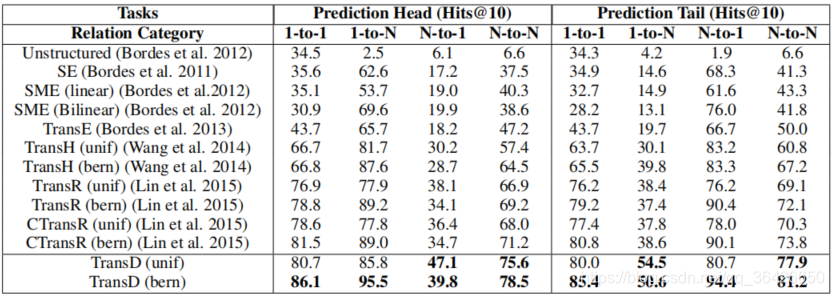
(2)链接预测:给定实体和关系,预测另一个实体。实验结果如图所示:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











