







偶然间,我看到一个号称撸美金的暴利项目。据作者介绍,只需简单搬运,便能轻松实现月入 $2000。具体做法是将国内的中文小说翻译为英文或西班牙文,然后搬运到 Alphanovel。听起来着实令人心动,于是我开启了为期一个月的亲测之旅。
项目原理为利用国内外网络小说市场的差异赚取收益。国内网络小说资源极为丰富,类型繁多,言情、科幻、仙侠等各类小说都拥有庞大的读者群体。而在国外,作者和作品相对较少,所以将国内小说搬运过去,无疑是一个极具潜力的好生意。签订合同后,即可获取 $100 美元的创作奖金。在平台上,作品每写满 5 万字,能获得 150 美元;每月更新满 10 万字,可获得 200 美元;全文达到 20 万字,能获得 400 美元。倘若作品在半年内的阅读量达到 25 万,还会有额外的 1000 美元奖励。
接下来,就让我们一同踏上这场充满挑战的 “写作之旅” 吧。
1、账号注册
网址:https://alphanovel.io/
使用谷歌邮箱进行注册
2、成为作家

3、创作
接下来为你解释小说的搬运流程。首先是小说的下载,可以在免费小说网站获取,也可以在淘宝、咸鱼上花 1 元买到很多小说。然后是小说题材的选取,考虑到西班牙文小说受到力推,最终决定将小说翻译为西班牙语,这里直接使用 chatGPT 进行翻译即可。最后是小说封面的制作,本想找淘宝制作,却处处是坑,原本说是 5 元,得知是非中文后变为 15 元,结果只是在原图上敲了几个字符,说实话,自己制作可能比这还好。将所有素材(标题、概要和特征、推荐语和朗朗上口的对话、人物描述、封面、正文等)准备好后,就可以把翻译好的小说粘贴到平台上发布。一旦你的作品达到 1 万字,便可以与网站签订合同。
3、证件上传
由于该项目需要护照,所以专门去办理了护照。将护照等证件上传,并填完相关信息后,就只需耐心等待审核了。
4、等待审核
然后就是漫长的等待,等了一周后,审核完看到了如下结果:
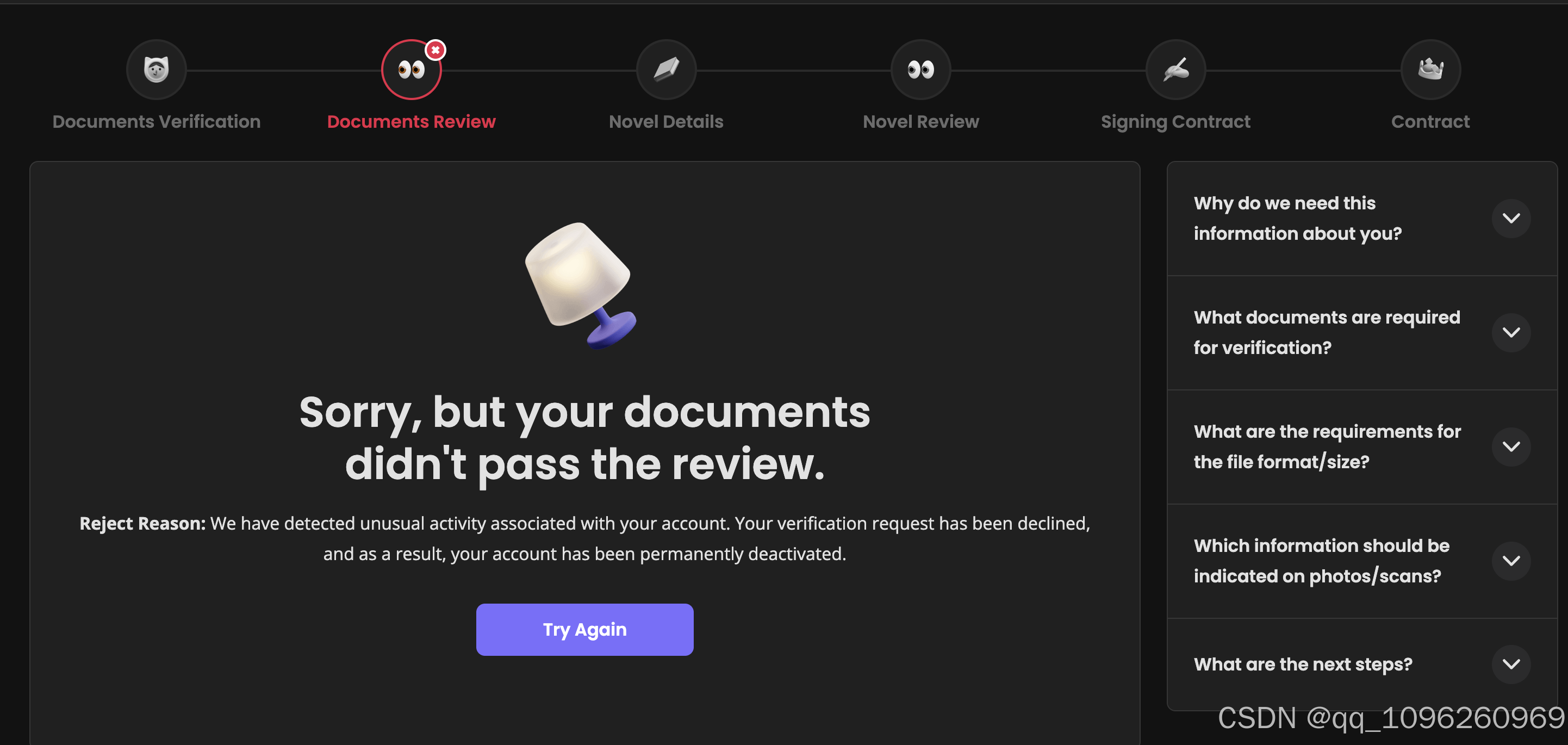
拒绝原因:我们检测到与您的账户相关的异常活动。您的验证请求已被拒绝,因此,您的账户已被永久停用。
直接把我账号停用了,无辜。。。。。
5、多次尝试
由于首次使用的并非本人真实姓名,后续重试即便使用了真实姓名,结果仍未改变。而且经过多次尝试发现,使用国内护照基本都会被直接拒绝。
-
尝试 1:在原基础上重试,仅修改了部分信息。因无法更改真实姓名,故仍使用之前的姓名和本人护照,但结果依旧。
-
尝试 2:使用全新谷歌账号,填写本人真实姓名和本人护照,可结果还是一样。
-
尝试 3:使用全新谷歌账号和国外护照(非本人),填写护照姓名,最终还是被拒,不过拒绝原因如下:
拒绝原因:请提供您作为作者的作品链接,以便我们评估您的作品对阿尔法定制小说(AlphaNovel)平台读者的相关性。
注:经过上述尝试,可以猜测 alphanovel 对中国大陆护照是直接拒绝处理的。后来虽切换为国外护照,但被要求提供小说链接,可这是搬运内容,根本无法提供,所以之后就没再继续尝试了。
6、小结:
最后,由于证件审核不通过原因,最终放弃了该撸美金的项目,最近也在尝试搞点副业,看来撸点美金没有那么容易啊,最后发一个自己粘贴的小说截图安慰一下自己。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









