







图的基本算法就是搜索。
图最具有代表性的算法就是深度优先搜索(DFS)和广度优先搜索(BFS)。
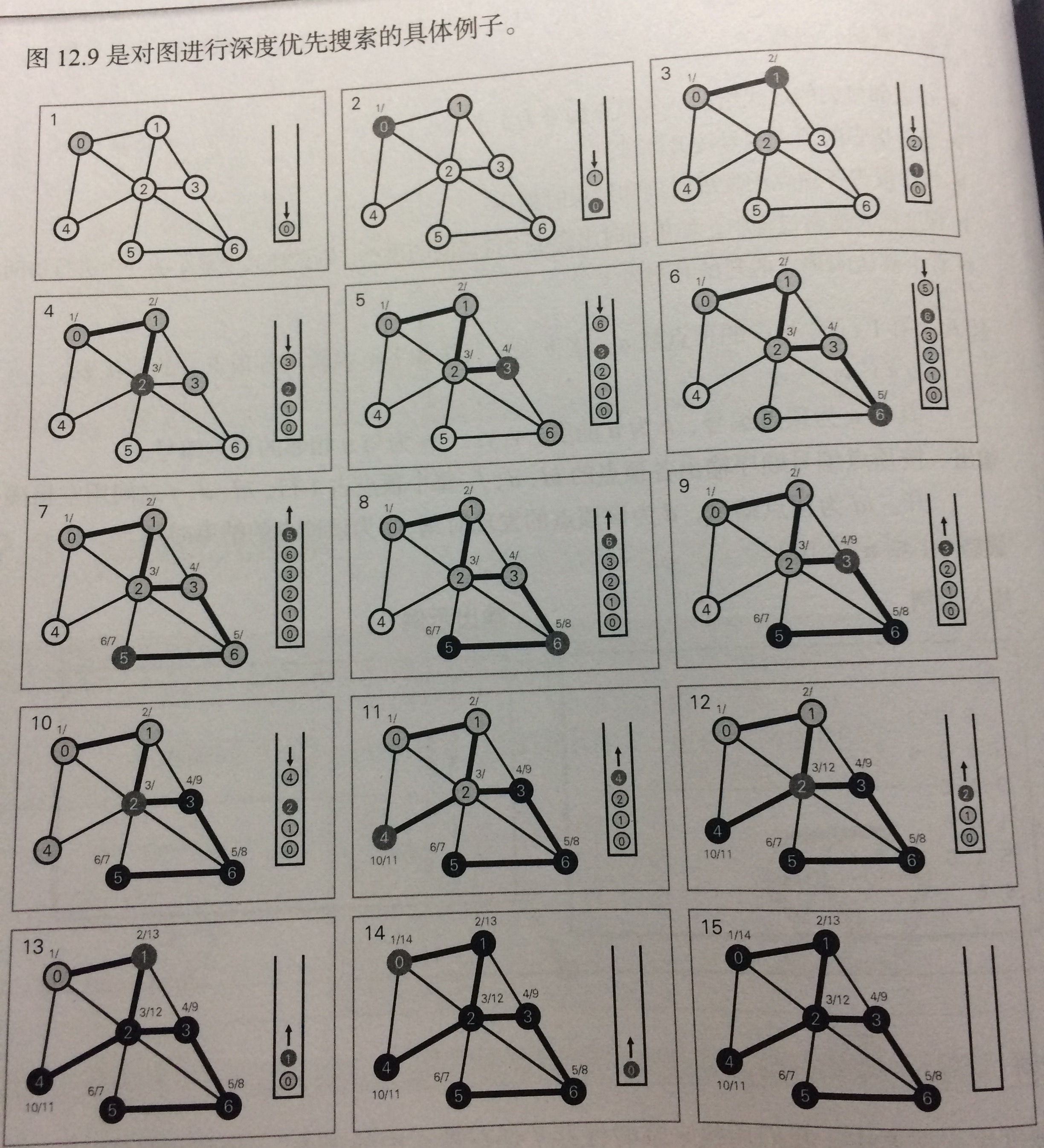
深度优先搜索:思路是尽可能地访问相邻顶点。
搜索一直持续到发现当前起点可到达的所有顶点为止。如果仍有顶点未被发现,则选择其中编号最小的一个作为新起点继续搜索。
栈用来临时保存“仍在搜索中的顶点”,即访问过程中的点:
1.将最初访问的顶点压入栈;
2.只要栈中仍有顶点,就循环进行以下操作;
*访问栈顶部的顶点u
*从当前访问的顶点u移动至顶点v时,将v压入栈。如果当前顶点u不存在未访问的相邻顶点,则将u从栈中删除。
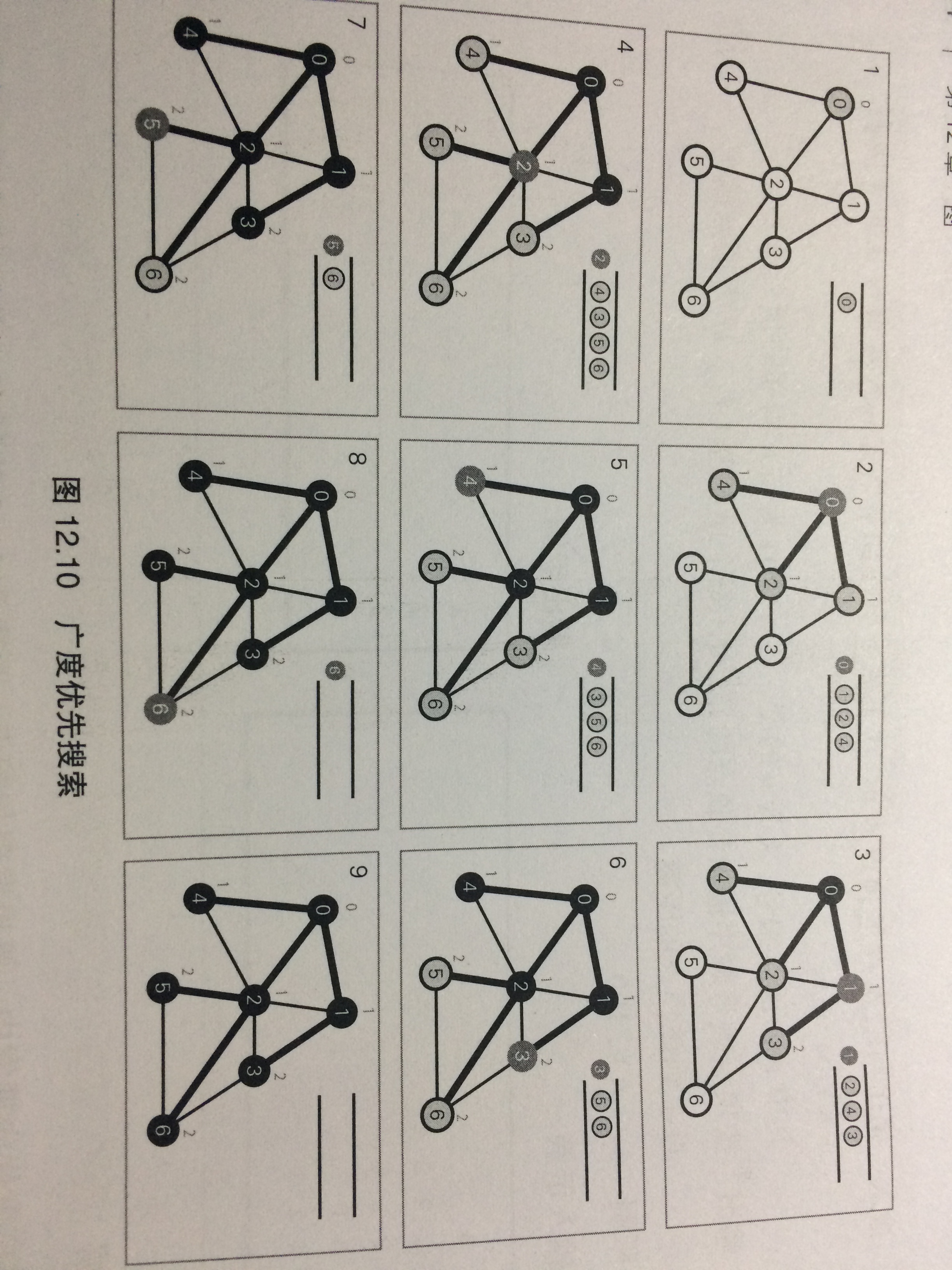
广度优先搜索:在广度优先搜索中,要想发现与起点s距离为k+1的顶点,首先要发现所有距离为k的顶点,因此可以依次求出起点到各顶点的最短距离。
(算法需要在发现所有距离源结点s为k的所有结点之后,才会发现距离源结点s为k+1的其他结点)
将各顶点v到s的距离记录在d[v]中。
1.将起点s放入队列Q(访问);
2.只要Q不为空,就循环执行下述处理;
*从Q中去除顶点u进行访问(访问结束)
*将与u相邻的为访问顶点v放入Q中,同时将d[v]更新为d[u+1]















 3316
3316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









