







 本文分享了如何基于机器视觉技术进行车辆速度检测与识别的毕设课题,探讨了课题背景、技术思路,包括图像输入、车辆检测跟踪、距离与速度计算,以及关键步骤的实现过程和实例。学长提供实用选题建议和解决方案,助力本科毕设顺利进行。
本文分享了如何基于机器视觉技术进行车辆速度检测与识别的毕设课题,探讨了课题背景、技术思路,包括图像输入、车辆检测跟踪、距离与速度计算,以及关键步骤的实现过程和实例。学长提供实用选题建议和解决方案,助力本科毕设顺利进行。
目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
本次分享的课题是
🎯基于图像处理的车辆速度测量与识别技术研究
背景和意义
随着城市化进程的加快,交通拥堵和道路安全问题日益突出。车辆速度的准确测量与识别对于交通管理、事故预防和道路安全监控具有重要意义。传统的速度测量方法多依赖于地面传感器或激光测速仪,但这些方法往往存在安装复杂、成本高和受环境影响等缺点。基于图像处理的车辆速度测量与识别技术,利用摄像头和计算机视觉算法,可以实现非接触式、高精度的车辆监测,具有成本低、安装灵活和实时性强等优势。通过图像采集、处理和分析,实现对道路上行驶车辆的速度监测和类型识别。这项技术不仅可以为交通管理部门提供实时数据支持,还能为智能交通系统的发展奠定基础,对于提升道路安全性和优化交通流量具有重要作用。

技术思路
设计思路包括多个关键步骤:数据采集、图像预处理、目标检测与跟踪、速度测量和结果分析。以下是各个步骤的详细描述与代码示例。
首先,数据采集是车辆速度测量与识别的第一步。为了保证测量的准确性和可靠性,通常在交通流量较大的路段安装摄像头,摄像头应设置在合适的高度和角度,以获取清晰的道路图像。可以选择高分辨率的摄像头,以便在后续处理时获得更多细节信息。数据采集时,需保证不同时间段和天气条件下的图像,以丰富数据集,增强模型的鲁棒性。实时视频流可以通过OpenCV的VideoCapture类进行捕获,并保存为视频文件或图像序列,以便后续处理和分析。
import cv2
# 初始化摄像头
cap = cv2.VideoCapture(0) # 使用0表示默认摄像头
while True:
ret, frame = cap.read()
if not ret:
break
cv2.imshow('Video Feed', frame) # 显示实时视频流
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
在完成数据采集后,下一步是对采集到的图像进行预处理。图像预处理的目的是提高后续目标检测的准确性和效率。常见的预处理步骤包括图像缩放、灰度化、去噪和边缘检测等。通过将图像转换为灰度图,可以减少计算复杂度;同时,应用高斯模糊等去噪技术,可以消除背景噪声,增强车辆边缘。这些预处理步骤为后续的目标检测与跟踪提供了清晰、干净的图像输入
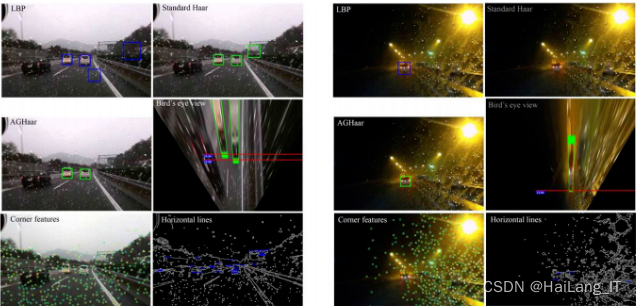
目标检测与跟踪是测量车辆速度的关键步骤。可以采用背景建模方法,如高斯混合模型(GMM),来构建静态背景,并通过前景分割技术提取出移动的车辆。接下来,使用轮廓检测或Haar级联分类器等方法识别车辆,并为每辆车分配唯一的ID以进行后续跟踪。通过连续帧中车辆的位置变化,可以准确记录车辆的运动轨迹,并为速度计算提供基础数据。
# 目标检测与追踪示例
fgbg = cv2.createBackgroundSubtractorMOG2()
while True:
ret, frame = cap.read()
if not ret:
break
fgmask = fgbg.apply(frame) # 应用背景建模
contours, _ = cv2.findContours(fgmask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
if cv2.contourArea(contour) > 500: # 过滤小轮廓
(x, y, w, h) = cv2.boundingRect(contour)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) # 绘制矩形框
一旦完成车辆的检测与跟踪,接下来便是车辆速度的计算。速度测量通常基于车辆在连续帧之间的位移和时间间隔。通过计算车辆在图像中的像素位移,并结合摄像头的实际高度和视场角,将像素转化为实际距离。速度的计算公式为:速度 = 距离 / 时间。需要注意的是,准确的时间获取是关键,OpenCV中可以使用cv2.getTickCount()来实现高精度的时间测量
最后,完成速度测量后,需要对结果进行分析与可视化。可以将检测到的车辆及其速度信息叠加到实时视频流中,方便观察。同时,可以统计不同时间段内的交通流量和平均速度,为交通管理提供数据支持。此外,可以利用数据可视化工具,将测量结果以图表形式展示,以便进行更深入的分析和决策支持。
# 结果可视化示例
cv2.putText(frame, f'Speed: {speed:.2f} km/h', (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 0, 0), 2)
cv2.imshow('Vehicle Speed Measurement', frame)效果图样例
我是海浪学长,创作不易,欢迎点赞、关注、收藏、留言。
毕设帮助,疑难解答,欢迎打扰!

















 959
959

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









