







ARP4761介绍
本示例再现了ARP4761和AIR6110标准中描述的车轮制动系统。它最初是由卡耐基梅隆大学(CMU)的软件工程研究所(SEI)设计的,旨在展示OSATE的以下能力:
- Fault Hazard Assesment(故障危害评估)
- Fault Impact (FMEA/FMES)(故障影响(FMEA/FMES))
- Fault Tree Analysis(故障树分析)
案例研究的完整描述见 AADL Fault Modeling and Analysis Within an ARP4761 Safety Assessment (CMU/SEI-2014-TR-020)
TR是基于早期版本的OSATE。本自述文件基于OSATE 2.7.1。
样例下载
CSDN资源下载:https://download.csdn.net/download/qq_37400312/74918049
示例的组织
这个项目包含两个模型。TR大部分使用的是simple文件夹下的aadl文件 (wbs.aadl是核心模块),其他特性在advanced文件夹中进行了声明。
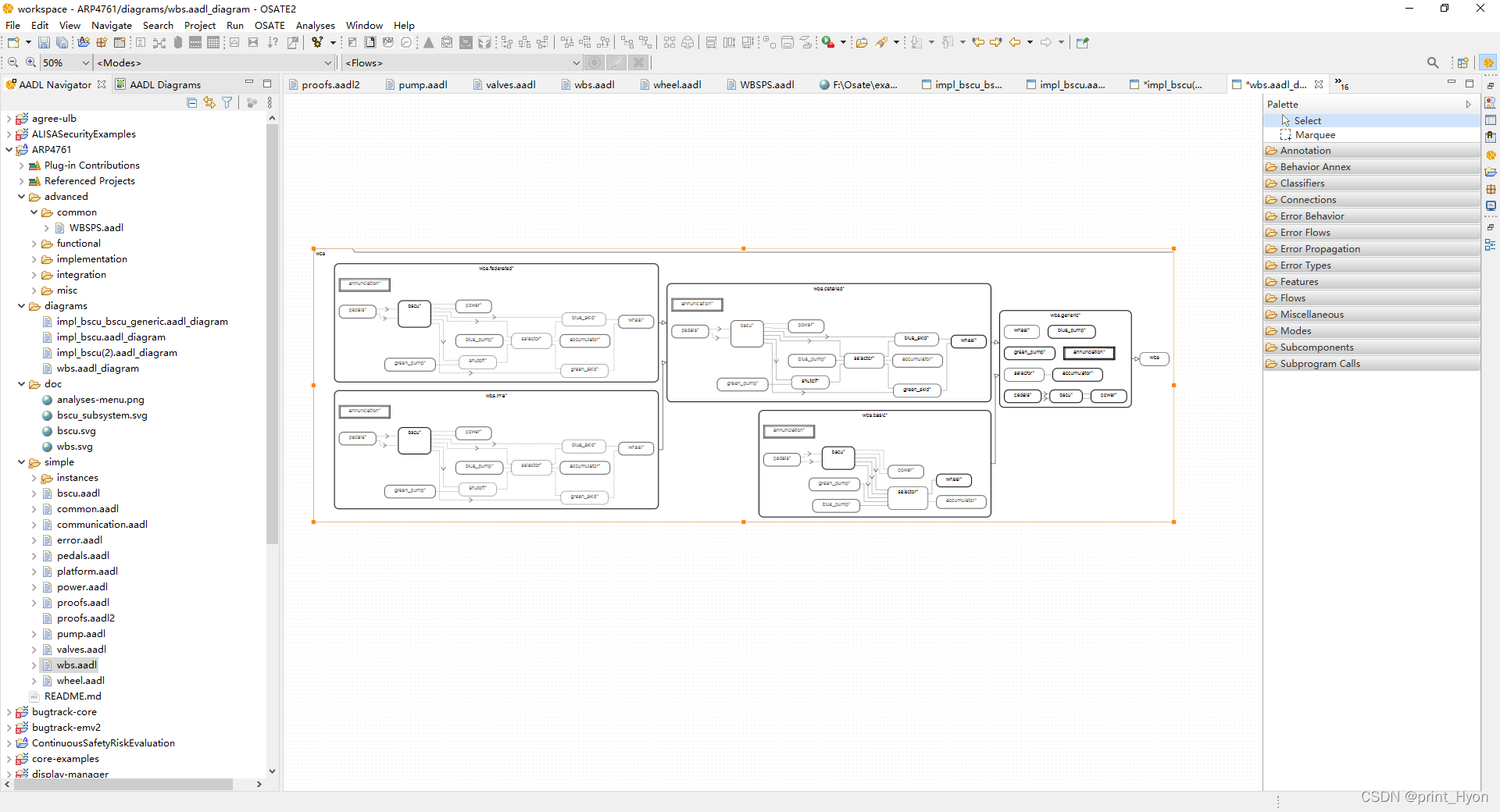
创建图表
-
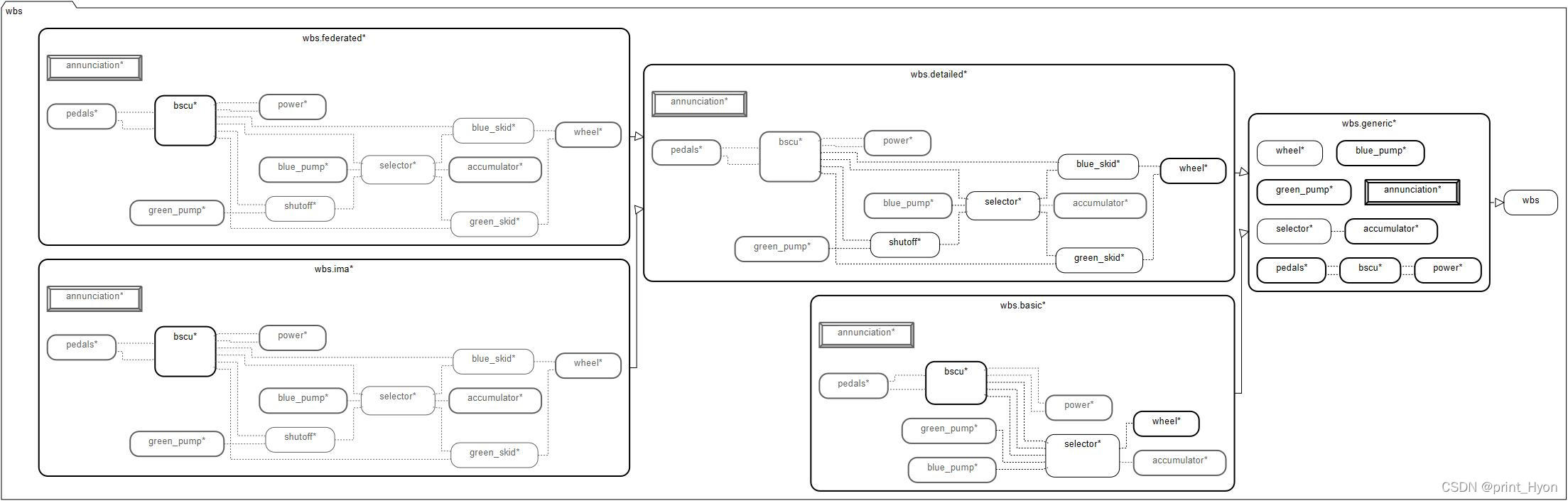
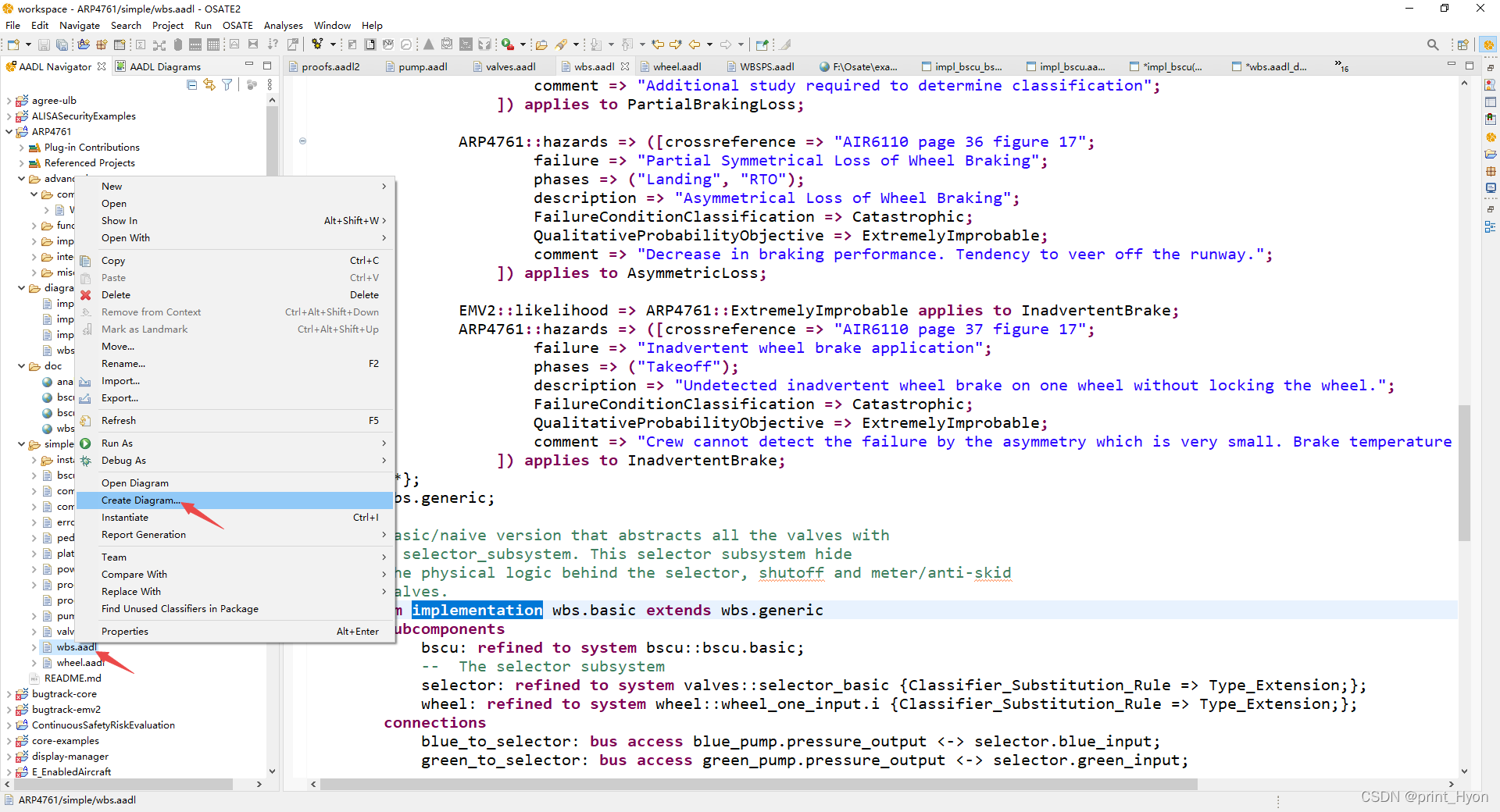
要生成如上图的图表,在AADL Navigator视图中,右键单击wbs.aadl,然后选择Create Diagram…。
-
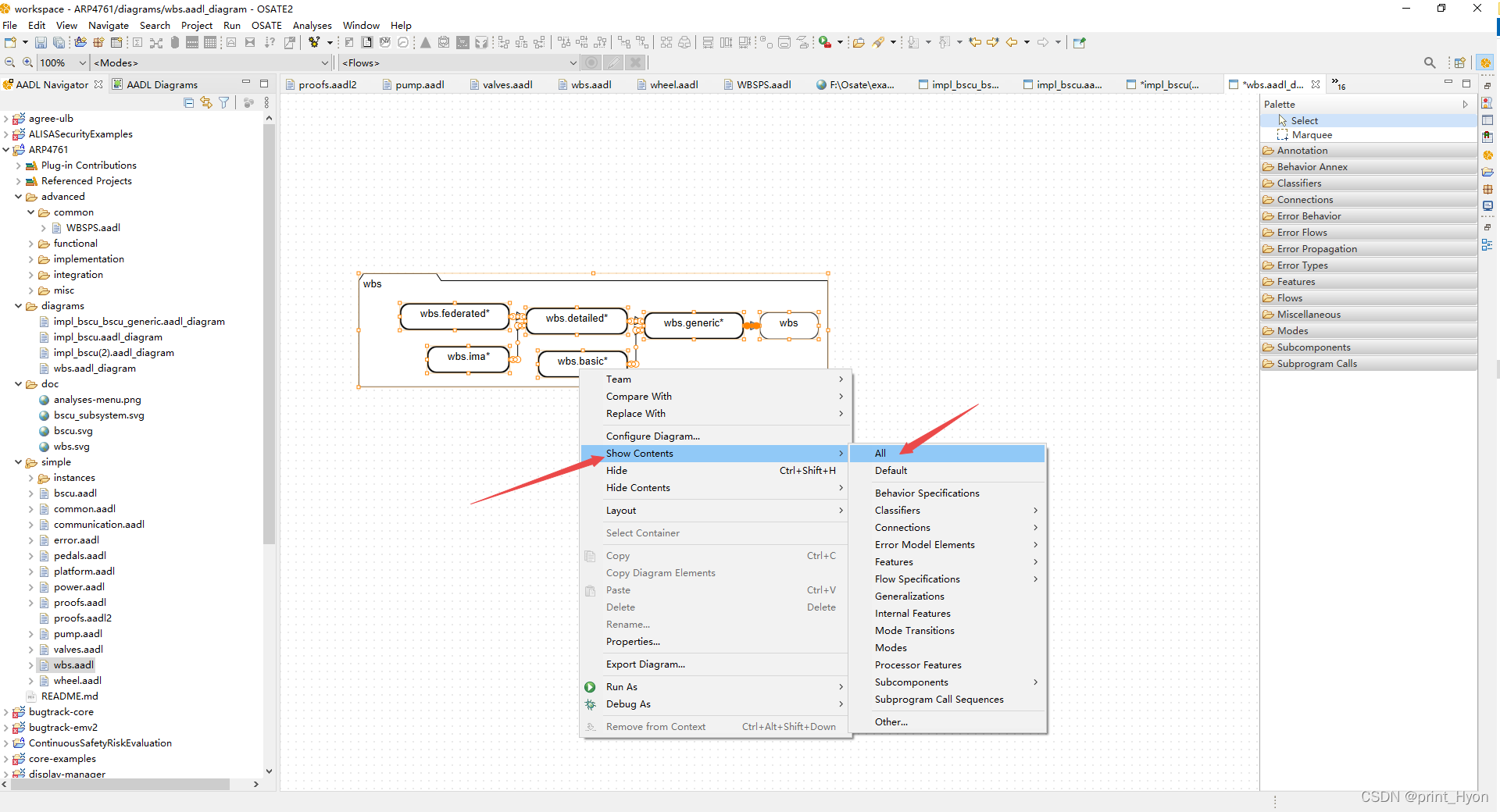
在图表中,选择全部的组件,右键Show Contents,选择All
-
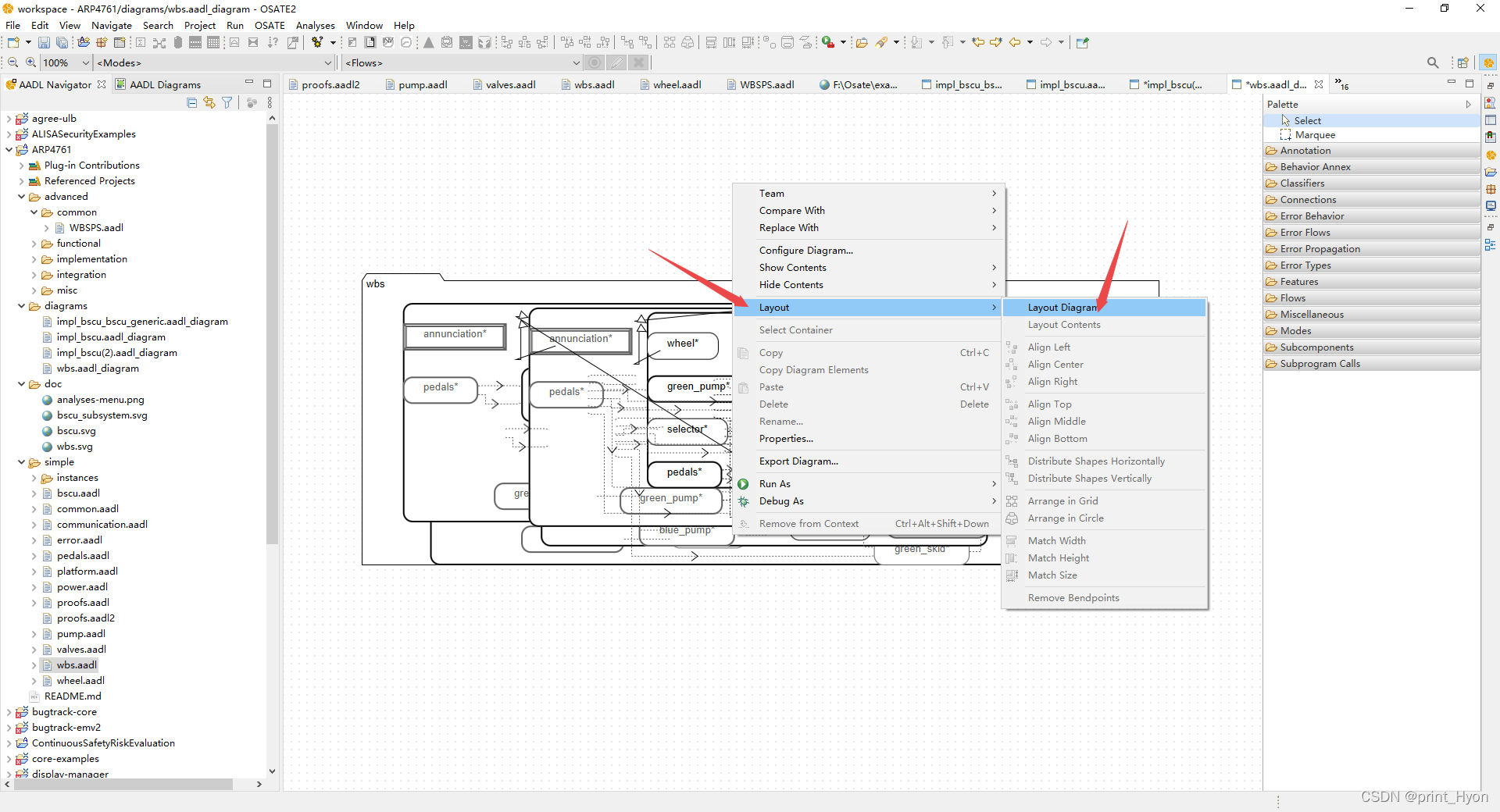
然后在空白处右键,选中Layout,选中Layout Diagram
-
图表生成
simple下部分aadl介绍
公共组件:common.aadl
- common是一个公共组件,只是单纯的创建了一个车辆应该有的基本组件
- 知识点:
- bus总线的创建
- bus总线的实现
- data命令数据的创建
- data命令数据的多种实现
package common
public
-- 电源总线
bus power
end power;
-- 电源总线开启的实现
bus implementation power.generic
end power.generic;
-- 脉冲宽度调制总线
bus pwm
end pwm;
-- 脉冲宽度调制总线开启的实现
bus implementation pwm.generic
end pwm.generic;
-- 命令数据
data command
end command;
-- 刹车命令数据的实现
data implementation command.brake
end command.brake;
-- 打滑命令数据的实现
data implementation command.skid
end command.skid;
-- 操纵杆命令数据的实现
data implementation command.pedal
end command.pedal;
-- 宣布命令数据的实现
data implementation command.announce
end command.announce;
-- 压力总线代表其他设备/泵 发送/接收 的压力
bus pressure
end pressure;
-- 压力总线的实现
bus implementation pressure.i
end pressure.i;
end common;
踏板的短部件:pedals.aadl
- 这是踏板的短部件,使用了上面的common包和公用的EMV2、ARP4761包
- 知识点:
- 项目内包的调用
- 公共包的调用
- system系统的创建
- 对组件特征features进行描述
- 输出数据端口out data port的使用
- 软件包的调用
- 对特征赋予其他软件包内组件的特征
- 附录EMV2的使用
- flow流的使用
- properties属性的使用
- 对组件转移transitions进行描述
package pedals
public
-- 这个包调用了项目自己写的common包和公用的EMV2、ARP4761包
with common;
with EMV2;
with ARP4761;
--
-- 这是踏板的短部件
--
system pedals
-- 有两个特征,signal1和signal2
-- 都是输出端口,而且具有common包内命令数据command的实现pedal
features
signal1: out data port common::command.pedal;
signal2: out data port common::command.pedal;
-- 具有一个附录,这个附录具有EMV2的特性
annex EMV2 {**
-- 使用error_library库内的type
use types error_library;
-- 使用error_library库内simple组件的特性
-- (simple组包含Operational和InternalFault两个状态)
use behavior error_library::simple;
-- 创建error propagations特性
-- 具有两个NoService类型的输出signal1、signal2
-- 具有两个流特征f1、f2,流数据来源于signal1、signal1
error propagations
signal1: out propagation {NoService};
signal2: out propagation {NoService};
flows
f1: error source signal1 {NoService};
f2: error source signal2 {NoService};
end propagations;
-- 创建component error behavior特性
-- 具有一个叫InternalFault的error event,无初始值
-- 具有一个叫nosignal的transition,赋值为InternalFault和simple组包含Operational两个状态的计算结果
-- 具有两个叫p1、p2的propagation,并根据signal进行赋值
component error behavior
events
InternalFault: error event;
transitions
nosignal: Operational -[InternalFault]-> Failed;
propagations
p1: Failed -[]-> signal1 {NoService};
p2: Failed -[]-> signal2 {NoService};
end component;
-- 创建属性值
-- 获取ARP4761包内的records列表hazards,并对列表内部分record进行赋值
-- 获取EMV2内的records列表OccurrenceDistribution,并对部分record进行赋值
properties
ARP4761::hazards => ([
crossreference => "TBD";
failure => "No signal for the pedals so that the BSCU cannot produce any results for the brakes.";
phases => ("TBD");
description => "No signal from the pedals";
FailureConditionClassification => Hazardous;
QualitativeProbabilityObjective => ExtremelyRemote;
comment => "Would be critical if both power supplies are lost";
]) applies to signal1.NoService, signal2.NoService;
EMV2::OccurrenceDistribution => [ProbabilityValue => 3.4e-5; Distribution => Fixed;] applies to Failed;
**};
end pedals;
-- 对pedals进行实现的功能generic
system implementation pedals.generic
end pedals.generic;
end pedals;
通告设备:communication.aadl
- 这个包包含一个通告设备和他的实现,当出现通信错误,并失去系统中的通知功能时,及时提醒
- 这个功能可能会因为一个更复杂的错误而失效,但足以满足我们目前的需求,并且显示了传播到主系统的错误源
- 知识点:
- device设备的创建
- device设备的实现
package communication
public
-- 这个包调用了项目自己写的common包和公用的EMV2、ARP4761包
with common;
with EMV2;
with ARP4761;
--
-- 这是一个通告设备,当出现通信错误,并失去系统中的通知功能时,及时提醒
-- 这个功能可能会因为一个更复杂的错误而失效,但足以满足我们目前的需求,并且显示了传播到主系统的错误源
-- 想知道更多错误引入FTA的信息可以参考ARP4761文档第199页,图L3
--
device annunciation
-- 具有一个特征,输出数据端口,来抽象表示系统内的通信
features
information: out data port common::command.announce;
-- 具有一个附录,这个附录具有EMV2的特性
annex EMV2 {**
-- 使用error_library库内的type
use types error_library;
-- 使用error_library库内simple组件的特性
-- (simple组包含Operational和InternalFault两个状态)
use behavior error_library::simple;
-- 创建error propagations特性
-- 具有一个NoService类型的输出information
-- 具有一个流特征f1,流数据来源于information
error propagations
information: out propagation {NoService};
flows
f1: error source information {NoService};
end propagations;
-- 创建component error behavior特性
-- 具有一个叫LossAnnunciation的error event,无初始值
-- 具有一个叫t1的transition,赋值为LossAnnunciation和simple组包含Operational两个状态的计算结果
-- 具有两个叫p1、p2的propagation,并根据information进行赋值
component error behavior
events
LossAnnunciation: error event;
transitions
t1: Operational -[LossAnnunciation]-> Failed;
propagations
p1: Failed -[]-> information {NoService};
end component;
-- 创建属性值
-- 获取EMV2内的records列表OccurrenceDistribution,并对部分record进行赋值
-- 获取ARP4761包内的records列表hazards,并对列表内部分record进行赋值
properties
EMV2::OccurrenceDistribution => [ProbabilityValue => 1.00; Distribution => Fixed;] applies to LossAnnunciation;
ARP4761::hazards => (
[crossreference => "AIR6110 and ARP4761 - see ARP4761 figure 3 page 199";
failure => "Loss of Annunciation";
phases => ("all");
description => "The system cannot annunce an error";
FailureConditionClassification => Catastrophic;
QualitativeProbabilityObjective => ExtremelyImprobable;
comment => "";
]) applies to LossAnnunciation;
**};
end annunciation;
-- 对annunciation进行实现的功能i
device implementation annunciation.i
end annunciation.i;
end communication;
车轮系统:wheel.aadl
- 知识点:
- 多个system的创建
- 多个system的实现
package wheel
public
with common;
-- 创建一个车轮系统
system wheel
end wheel;
--
-- 这是只有一个输入的轮子的例子。
-- 不代表这两个通道,而是把这两个通道抽象成一个单独的通道。
--
system wheel_one_input extends wheel
-- 有一个特征,input
-- input是需求总线访问,具有common包内总线pressure的实现i
features
input: requires bus access common::pressure.i;
-- 具有一个附录,这个附录具有EMV2的特性
annex EMV2 {**
-- 使用error_library库内的type
use types error_library;
-- 使用error_library库内simple组件的特性
-- (simple组包含Operational和InternalFault两个状态)
use behavior error_library::simple;
-- 创建error propagations特性
-- 具有一个NoService类型的输出input
error propagations
input: in propagation {NoService};
end propagations;
-- 创建component error behavior特性
-- 具有一个叫t1的transition,赋值为input和simple组包含Operational两个状态的计算结果
component error behavior
transitions
t1: Operational -[input {NoService}]-> Failed;
end component;
**};
end wheel_one_input;
-- 对wheel_one_input进行实现的功能i
system implementation wheel_one_input.i
end wheel_one_input.i;
--
-- 这是一个带有两个输入的车轮示例,每个通道是一个输入。
-- 另一个system将两个泵抽象成一个总线。
-- 该system明确表示了两个通道。
--
system wheel_two_inputs extends wheel_one_input
-- 有两个特征,green_input和blue_input
-- 都是需求总线访问,具有common包内总线pressure的实现i
features
green_input: requires bus access common::pressure.i;
blue_input: requires bus access common::pressure.i;
-- 具有一个附录,这个附录具有EMV2的特性
annex EMV2 {**
-- 使用error_library库内的type
use types error_library;
-- 使用error_library库内simple组件的特性
-- (simple组包含Operational和InternalFault两个状态)
use behavior error_library::simple;
-- 创建error propagations特性
-- 具有两个NoService类型的输出green_input、blue_input
error propagations
green_input: in propagation {NoService};
blue_input: in propagation {NoService};
end propagations;
-- 创建component error behavior特性
-- 具有t1、t2两个transition,赋值为green_input、blue_input分别和simple组包含Operational状态的计算结果
component error behavior
transitions
t1: Operational -[green_input {NoService}]-> Failed;
t2: Operational -[blue_input {NoService}]-> Failed;
end component;
**};
end wheel_two_inputs;
-- 对wheel_two_inputs进行实现的功能i
system implementation wheel_two_inputs.i
end wheel_two_inputs.i;
end wheel;
平台模块:simple -> platform.aadl
- 通用中央处理器的创建和多种架构的实现
- 知识点:
- 虚拟进程的创建
- 虚拟进程的实现
- 进程的创建
- 进程的多种实现
- 系统实现的子组件描述
package platform
public
with EMV2;
with ARP4761;
--
-- 将故障与分区层相关联,分区层是与管理/处理分区本身相关联的运行时。
--
virtual processor partition
-- 使用附录特性描述该虚拟进程
annex EMV2 {**
use types error_library;
use behavior error_library::simple;
error propagations
bindings: out propagation {SoftwareFailure, HardwareFailure};
processor: in propagation {HardwareFailure};
flows
fsoft: error source bindings {SoftwareFailure};
fhard: error path processor {HardwareFailure} -> bindings;
end propagations;
component error behavior
events
SoftwareFailure: error event;
transitions
Operational -[SoftwareFailure]-> Failed;
propagations
normal: Operational -[]-> bindings {NoError};
p2: Failed -[]-> bindings {SoftwareFailure};
end component;
properties
EMV2::severity => ARP4761::Major applies to SoftwareFailure;
EMV2::likelihood => ARP4761::Probable applies to SoftwareFailure;
ARP4761::hazards => ([crossreference => "TBD";
failure => "";
phases => ("all");
description => "Software failure from the platform (OS exception, etc.)";
FailureConditionClassification => Major;
QualitativeProbabilityObjective => Probable;
comment => "Impact all components that are controlled by this software";
]) applies to SoftwareFailure;
EMV2::OccurrenceDistribution => [ProbabilityValue => 1.35e-5; Distribution => Poisson;] applies to SoftwareFailure; -- EMV2::OccurrenceDistribution => [ ProbabilityValue => 6.75e-5 ; Distribution => Fixed;] applies to SoftwareFailure;
**};
end partition;
-- generic实现虚拟进程
virtual processor implementation partition.generic
end partition.generic;
--
-- 这是通用的中央处理器。
-- 在该模型中,这用于捕获处理器的物理部分。
-- 然后,对于每个实现(federated and IMA),我们定义了适当的软件故障。
--
processor cpu
-- 使用附录特性描述cpu进程
annex EMV2 {**
use types error_library;
use behavior error_library::simple;
--
-- 所有处理器的硬件故障将自动添加。
--
error propagations
bindings: out propagation {HardwareFailure};
flows
f1: error source bindings {HardwareFailure};
end propagations;
component error behavior
events
InternalFailure: error event;
transitions
Operational -[InternalFailure]-> Failed;
propagations
normal: Operational -[]-> bindings {NoError};
pfail: Failed -[]-> bindings {HardwareFailure};
end component;
properties
ARP4761::hazards => ([crossreference => "TBD";
failure => "";
phases => ("all");
description => "Hardware Failure (processor, device, etc.)";
FailureConditionClassification => Major;
QualitativeProbabilityObjective => Probable;
comment => "Impact all software components associated to the hardware";
]) applies to InternalFailure;
EMV2::OccurrenceDistribution => [ProbabilityValue => 1.35e-5; Distribution => Poisson;] applies to InternalFailure;
EMV2::OccurrenceDistribution => [ProbabilityValue => 6.75e-5; Distribution => Fixed;] applies to f1;
**};
end cpu;
--
-- cpu的ima实现方法
--
processor implementation cpu.ima
-- 进程实现方法内包含一个子组件
-- 子组件内创建了四个虚拟进程partition.generic的实现
subcomponents
partition1: virtual processor partition.generic;
partition2: virtual processor partition.generic;
partition3: virtual processor partition.generic;
partition4: virtual processor partition.generic;
end cpu.ima;
--
-- 单一处理器用于联合架构实现方法
--
processor implementation cpu.single
annex EMV2 {**
use types error_library;
use behavior error_library::simple;
error propagations
processor: out propagation {SoftwareFailure};
flows
fsoft: error source processor {SoftwareFailure};
end propagations;
component error behavior
events
SoftwareFailure: error event;
transitions
Operational -[SoftwareFailure]-> Failed;
propagations
normal: Operational -[]-> processor {NoError};
psoft: Failed -[]-> processor {SoftwareFailure};
end component;
properties
ARP4761::hazards => ([crossreference => "TBD";
failure => "";
phases => ("all");
description => "Software failure from the platform (OS exception, etc.)";
FailureConditionClassification => Major;
QualitativeProbabilityObjective => Probable;
comment => "Impact all components that are controlled by this software";
]) applies to SoftwareFailure;
EMV2::OccurrenceDistribution => [ProbabilityValue => 1.35e-5; Distribution => Poisson;] applies to SoftwareFailure; -- EMV2::OccurrenceDistribution => [ ProbabilityValue => 6.75e-5 ; Distribution => Fixed;] applies to SoftwareFailure;
**};
end cpu.single;
-- 创建platform系统
system platform
end platform;
--
-- IMA平台架构实现
--
system implementation platform.ima
-- 系统实现内包含一个子组件
-- 子组件内创建了cpu的ima实现方法
subcomponents
cpu: processor cpu.ima;
end platform.ima;
--
-- 联合平台架构实现
--
system implementation platform.federated
-- 系统实现内包含一个子组件
-- 子组件内创建了两个cpu的single实现方法
subcomponents
cpu1: processor cpu.single;
cpu2: processor cpu.single;
end platform.federated;
end platform;
BSCU系统:simple -> bscu.aadl
- 这是BSCU系统的实现, BSCU包含两个子系统。
- 每个BSCU子系统都有以下接口:
- 电源
- 踏板
- 每个BSCU子系统都有以下子组件:
- 从踏板值产生数据的命令功能。
- 指示值是否有效的监视功能。
- 主BSCU接收数据和电力,并将其转发给每个子系统。
- 此外,BSCU包含一个选择备用输出数据
- 该数据指示我们应该使用第一个子系统(Select_Alternate == false)还是使用第二个(备用)子系统(Select_Alternate == true)。
- 指挥系统是每个bscu子系统的一部分。
- 它从制动踏板值产生数据。
- 此组件是错误端的错误接收器,可能会因电源相关错误和维修相关错误(无踏板)而失败。
- 知识点:
- port特性的使用
- system实现的继承
package bscu
public
with common;
with platform;
with Base_Types;
with error_library;
with EMV2;
with ARP4761;
--
-- 这是BSCU系统的实现
-- BSCU包含两个子系统。
-- 每个BSCU子系统都有以下接口:
-- 1.电源
-- 2.踏板
-- 然后,每个BSCU子系统都有以下子组件:
-- 1.从踏板值产生数据的命令功能。
-- 2.指示值是否有效的监视功能。
-- 主BSCU接收数据和电力,并将其转发给每个子系统。
-- 此外,BSCU包含一个选择备用输出数据
-- 该数据指示我们应该使用第一个子系统(Select_Alternate == false)还是使用第二个(备用)子系统(Select_Alternate == true)。
-- 指挥系统是每个bscu子系统的一部分。
-- 它从制动踏板值产生数据。
-- 此组件是错误端的错误接收器,可能会因电源相关错误和维修相关错误(无踏板)而失败。
--
process command
-- 该进程具有两个输出特性brake、skid和一个输入特性pedalvalue
-- 进程内的特性都从common包内的command的各种实现进行赋值
features
brake: out data port common::command.brake;
skid: out data port common::command.skid;
pedalvalue: in data port common::command.pedal;
end command;
-- 对command进程创建实现发方法
process implementation command.i
annex EMV2 {**
use types error_library;
use behavior error_library::simple;
error propagations
pedalvalue: in propagation {NoService};
brake: out propagation {NoValue};
skid: out propagation {NoValue};
processor: in propagation {SoftwareFailure, HardwareFailure};
flows
nopedal: error sink pedalvalue {NoService};
noskid: error source skid {NoValue};
nobrake: error source brake {NoValue};
platformerr: error sink processor {SoftwareFailure, HardwareFailure};
end propagations;
component error behavior
transitions
terrfrompedal: Operational -[pedalvalue {NoService}]-> Failed;
terrfromplatformsoft: Operational -[processor {SoftwareFailure}]-> Failed;
terrfromplatformhard: Operational -[processor {HardwareFailure}]-> Failed;
propagations
-- Here, we can imply that the NoService error from pedalvalue
-- is transformed into a NoValue on brake and skid features.
-- So, basically, this should be shown in the FMEA/FaultImpact
-- report. So, the report should show the error flows
-- pedals/NoService -> commands/brake/skid/NoValue -> monitor/NoValue -> selector/NoValue
p1: Failed -[]-> brake {NoValue};
p2: Failed -[]-> skid {NoValue};
end component;
**};
end command.i;
--
-- 监视器组件接收来自命令系统的值(brake和skid值),并检查系统是否有效。
-- 我们每个BSCU都有一台显示器。
-- 如果没有power,monitor可能会出现故障。
--
process monitor
features
brake: in data port common::command.brake;
skid: in data port common::command.skid;
valid: out data port Base_Types::Boolean;
end monitor;
-- 对monitor进程创建实现发方法
process implementation monitor.i
annex EMV2 {**
use types error_library;
use behavior error_library::simple;
error propagations
processor: in propagation {SoftwareFailure, HardwareFailure};
brake: in propagation {NoValue};
skid: in propagation {NoValue};
valid: out propagation {NoValue};
flows
fsoft: error sink processor {SoftwareFailure, HardwareFailure};
val: error source valid {NoValue};
bsink: error sink brake {NoValue};
ssink: error sink skid {NoValue};
end propagations;
component error behavior
events
InvalidReport: error event;
transitions
terrinvalidreport: Operational -[InvalidReport]-> Failed;
noskid: Operational -[skid {NoValue}]-> Failed;
nobrake: Operational -[brake {NoValue}]-> Failed;
terrfromplatformsoft: Operational -[processor {SoftwareFailure}]-> Failed;
terrfromplatformhard: Operational -[processor {HardwareFailure}]-> Failed;
propagations
p1: Failed -[]-> valid {NoValue};
end component;
properties
ARP4761::hazards => ([crossreference => "TBD";
failure => "Invalid Report from BSCU Monitor";
phases => ("TBD");
description => "Report from a Monitor that causes an invalid switch to the alternate mode";
FailureConditionClassification => Minor;
QualitativeProbabilityObjective => Probable;
comment => "Minor Hazard";
]) applies to InvalidReport;
**};
end monitor.i;
-- 创建系统bscu_subsystem
system bscu_subsystem
features
pwr: requires bus access common::power.generic;
pedal: in data port common::command.pedal;
cmd_skid: out data port common::command.skid;
cmd_brk: out data port common::command.brake;
valid: out data port Base_Types::Boolean;
end bscu_subsystem;
-- 队系统bscu_subsystem创建实现方法generic
system implementation bscu_subsystem.generic
-- 创建子组件
subcomponents
mon: process monitor.i;
cmd: process command.i;
-- 创建6个端口,用于对数据赋值
connections
pedaltocmd: port pedal -> cmd.pedalvalue;
brakecmd: port cmd.brake -> mon.brake;
brakecmd_ext: port cmd.brake -> cmd_brk;
skidcmd_ext: port cmd.skid -> cmd_skid;
skidcmd: port cmd.skid -> mon.skid;
isvalid: port mon.valid -> valid;
annex EMV2 {**
use types error_library;
use behavior error_library::simple;
error propagations
pwr: in propagation {NoPower};
valid: out propagation {NoValue};
flows
nopwr: error path pwr {NoPower} -> valid {NoValue};
end propagations;
component error behavior
transitions
t1: Operational -[pwr {NoPower}]-> Failed;
propagations
p1: Failed -[]-> valid {NoValue};
end component;
composite error behavior
states
[mon.failed or cmd.failed]-> Failed;
[mon.operational and cmd.operational]-> Operational;
end composite;
properties
ARP4761::hazards => ([crossreference => "ARP4761 figure L4 page 215";
failure => "Failure of the BSCU, either from the monitor, the command or both";
phases => ("all");
description => "Failure of a BSCU";
FailureConditionClassification => Major;
QualitativeProbabilityObjective => Probable;
comment => "Would be critical if two subsystem (primary and redundant) are deffective";
]) applies to Failed;
EMV2::OccurrenceDistribution => [ProbabilityValue => 3.3e-5; Distribution => Fixed;] applies to Failed;
**};
end bscu_subsystem.generic;
--
-- 该system是一个二进制运算符,它根据两个输入产生一个输出。
-- 如果第一个输入为真,则结果为假。否则,结果是真的。
--
system select_alternate
features
input1: in data port Base_Types::Boolean;
input2: in data port Base_Types::Boolean;
result: out data port Base_Types::Boolean;
annex EMV2 {**
use types error_library;
use behavior error_library::simple;
error propagations
input1: in propagation {NoValue};
input2: in propagation {NoValue};
result: out propagation {NoValue};
flows
f1: error source result {NoValue};
f2: error sink input1 {NoValue};
f3: error sink input2 {NoValue};
end propagations;
--
-- 我们认为组件可能具有不一致的行为,并在没有原因的情况下选择替代源。
-- 我们用一个名为InternalError的事件捕捉到了这一点。
--
component error behavior
events
InternalError: error event;
transitions
t1: Operational -[InternalError]-> Failed;
-- 如果我们没有来自每个监视器的任何值,我们将无法再发送有效数据。
t2: Operational -[input1 {NoValue} and input2 {NoValue}]-> Failed;
propagations
p1: Failed -[]-> result {NoValue};
end component;
properties
EMV2::OccurrenceDistribution => [ProbabilityValue => 3.6e-6; Distribution => Poisson;] applies to InternalError;
EMV2::severity => ARP4761::Hazardous applies to InternalError;
EMV2::likelihood => ARP4761::ExtremelyImprobable applies to InternalError;
ARP4761::hazards => ([crossreference => "ARP4761 figure L4 page 215";
failure => "";
phases => ("all");
description => "BSCU validity monitor incorrectly report a Failure causing switch to alternate";
FailureConditionClassification => Hazardous;
QualitativeProbabilityObjective => ExtremelyImprobable;
comment => "";
]) applies to InternalError;
**};
end select_alternate;
-- 创建bscu系统
system bscu
features
pwr1: requires bus access common::power.generic;
pwr2: requires bus access common::power.generic;
pedal1: in data port common::command.pedal;
pedal2: in data port common::command.pedal;
Select_Alternate: out data port Base_Types::Boolean;
cmd_nor: out data port common::command.skid;
cmd_alt: out data port common::command.skid;
annex EMV2 {**
use types error_library;
error propagations
pwr1: in propagation {NoPower};
pwr2: in propagation {NoPower};
pedal1: in propagation {NoService};
pedal2: in propagation {NoService};
end propagations;
**};
end bscu;
-- 创建bscu的实现方法basic
system implementation bscu.basic
annex EMV2 {**
use types error_library;
use behavior error_library::bscu;
error propagations
flows
es1: error sink pwr1 {NoPower};
es2: error sink pwr2 {NoPower};
end propagations;
component error behavior
transitions
nopower1: Operational -[pwr1 {NoPower}]-> Failed;
nopower2: Operational -[pwr2 {NoPower}]-> Failed;
end component;
properties
ARP4761::hazards => ([crossreference => "TBD";
failure => "No power line";
phases => ("TBD");
description => "Permanent failure of power supply source";
FailureConditionClassification => Catastrophic;
QualitativeProbabilityObjective => ExtremelyImprobable;
comment => "Would be critical if both power supplies are lost";
]) applies to pwr1, pwr2;
**};
end bscu.basic;
-- 创建bscu的实现方法generic
system implementation bscu.generic
subcomponents
sub1: system bscu_subsystem.generic;
sub2: system bscu_subsystem.generic;
select: system select_alternate;
connections
sub1pwr: bus access pwr1 <-> sub1.pwr;
sub2pwr: bus access pwr2 <-> sub2.pwr;
sub1pedal: port pedal1 <-> sub1.pedal;
sub2pedal: port pedal2 <-> sub2.pedal;
selectvalid1: port sub1.valid -> select.input1;
selectvalid2: port sub2.valid -> select.input2;
selectvalidout: port select.result -> Select_Alternate;
sub1skid: port sub1.cmd_skid -> cmd_nor;
sub2skid: port sub2.cmd_skid -> cmd_alt;
annex EMV2 {**
use types error_library;
use behavior error_library::bscu;
component error behavior
transitions
nopower: Operational -[pwr1 {NoPower} and pwr2 {NoPower}]-> Failed;
end component;
composite error behavior
states
[sub1.Failed and sub2.Failed]-> Failed;
[sub1.Failed and sub2.Operational]-> Alternate;
[sub1.Operational and sub2.Operational and select.Failed]-> Alternate;
[sub1.Operational and sub2.Operational and select.Operational]-> Operational;
end composite;
properties
ARP4761::hazards => ([crossreference => "TBD";
failure => "No power line";
phases => ("TBD");
description => "Permanent failure of power supply source";
FailureConditionClassification => Hazardous;
QualitativeProbabilityObjective => ExtremelyImprobable;
comment => "Would be critical if both power supplies are lost";
]) applies to pwr1, pwr2;
**};
end bscu.generic;
-- 创建bscu的实现方法federated继承generic方法的全部特性
system implementation bscu.federated extends bscu.generic
subcomponents
platform: system platform::platform.federated;
properties
Actual_Processor_Binding => (reference (platform.cpu1)) applies to sub1.cmd;
Actual_Processor_Binding => (reference (platform.cpu1)) applies to sub1.mon;
Actual_Processor_Binding => (reference (platform.cpu2)) applies to sub2.cmd;
Actual_Processor_Binding => (reference (platform.cpu2)) applies to sub2.mon;
end bscu.federated;
-- 创建bscu的实现方法ima继承generic方法的全部特性
system implementation bscu.ima extends bscu.generic
subcomponents
platform: system platform::platform.ima;
properties
Actual_Processor_Binding => (reference (platform.cpu.partition1)) applies to sub1.cmd;
Actual_Processor_Binding => (reference (platform.cpu.partition2)) applies to sub1.mon;
Actual_Processor_Binding => (reference (platform.cpu.partition3)) applies to sub2.cmd;
Actual_Processor_Binding => (reference (platform.cpu.partition4)) applies to sub2.mon;
end bscu.ima;
end bscu;
主程序:simple -> wbs.aadl
- wbs.aadl是核心模块,通过调用其他包内的模块,实现了车轮制动系统
package wbs
public
with bscu;
with communication;
with valves;
with wheel;
with pump;
with power;
with pedals;
with ARP4761;
with EMV2;
--
-- 车轮制动系统的虚拟部件。
--
system wbs
end wbs;
-- 创建车轮制动系统虚拟部件的实现方法generic
system implementation wbs.generic
subcomponents
-- 踏板系统
pedals: system pedals::pedals.generic;
-- 动力系统
power: system power::power.generic;
-- 图表顶部的两个泵
blue_pump: system pump::pump.i;
green_pump: system pump::pump.i;
-- 蓄压泵
accumulator: system pump::pump.i;
-- 选择器子系统
selector: system valves::selector;
bscu: system bscu::bscu.generic;
wheel: system wheel::wheel;
-- 通知装置
annunciation: device communication::annunciation.i;
connections
accu_to_sel: bus access selector.accumulator_input <-> accumulator.pressure_output;
power1: bus access bscu.pwr1 <-> power.line1;
power2: bus access power.line2 <-> bscu.pwr2;
pedal1: port pedals.signal1 -> bscu.pedal1;
pedal2: port pedals.signal2 -> bscu.pedal2;
annex EMV2 {**
-- WBS系统有以下错误状态::
-- Operational操作性
-- AnnunciatedTotalBrakingLoss通告的总制动损失
-- UnannunciatedTotalBrakingLoss非相关总制动损失
-- PartialBrakingLoss部分制动损失
-- AsymmetricLoss不对称损失
-- InadvertentBrake意外刹车
use types error_library;
use behavior error_library::wbs;
composite error behavior
states
[bscu.Failed and accumulator.Failed and annunciation.Failed]-> AnnunciatedBrakingLoss;
[blue_pump.Failed and green_pump.Failed and accumulator.Failed and
annunciation.Failed]-> AnnunciatedBrakingLoss;
[bscu.Failed and accumulator.Failed and annunciation.Failed]-> UnannunciatedBrakingLoss;
[blue_pump.Failed and green_pump.Failed and accumulator.Failed and
annunciation.Failed]-> UnannunciatedBrakingLoss;
end composite;
properties
ARP4761::hazards => ([crossreference => "AIR6110 page 35 figure 17";
failure => "Crew detect the failure when the brakes are operated (unanunciated) or select an appropaite landing spot (annunciated)";
phases => ("Landing", "RTO");
description => "Total Loss of Wheel Braking";
FailureConditionClassification => Hazardous;
QualitativeProbabilityObjective => ExtremelyImprobable;
comment => "Reference to crew procedures for loss of normal and reserve modes";
]) applies to AnnunciatedBrakingLoss, UnannunciatedBrakingLoss;
ARP4761::hazards => ([crossreference => "AIR6110 page 35 figure 17";
failure => "Crew detects the failure when brakes are used. Use available wheel braking, spoilers and thrust reverses to decelerate.";
phases => ("Landing", "RTO");
description => "Partial Symmetrical Loss of Wheel Braking";
FailureConditionClassification => Hazardous;
QualitativeProbabilityObjective => ExtremelyImprobable;
comment => "Additional study required to determine classification";
]) applies to PartialBrakingLoss;
ARP4761::hazards => ([crossreference => "AIR6110 page 36 figure 17";
failure => "Partial Symmetrical Loss of Wheel Braking";
phases => ("Landing", "RTO");
description => "Asymmetrical Loss of Wheel Braking";
FailureConditionClassification => Catastrophic;
QualitativeProbabilityObjective => ExtremelyImprobable;
comment => "Decrease in braking performance. Tendency to veer off the runway.";
]) applies to AsymmetricLoss;
EMV2::likelihood => ARP4761::ExtremelyImprobable applies to InadvertentBrake;
ARP4761::hazards => ([crossreference => "AIR6110 page 37 figure 17";
failure => "Inadvertent wheel brake application";
phases => ("Takeoff");
description => "Undetected inadvertent wheel brake on one wheel without locking the wheel.";
FailureConditionClassification => Catastrophic;
QualitativeProbabilityObjective => ExtremelyImprobable;
comment => "Crew cannot detect the failure by the asymmetry which is very small. Brake temperature can reach very high temperature.";
]) applies to InadvertentBrake;
**};
end wbs.generic;
-- 用选择器子系统抽象所有阀门的基本/初始版本。
-- 该选择器子系统隐藏了选择器、关闭阀和仪表/防滑阀背后的物理逻辑。
system implementation wbs.basic extends wbs.generic
subcomponents
bscu: refined to system bscu::bscu.basic;
-- 选择子系统
selector: refined to system valves::selector_basic {Classifier_Substitution_Rule => Type_Extension;};
wheel: refined to system wheel::wheel_one_input.i {Classifier_Substitution_Rule => Type_Extension;};
connections
blue_to_selector: bus access blue_pump.pressure_output <-> selector.blue_input;
green_to_selector: bus access green_pump.pressure_output <-> selector.green_input;
bscu_sel_to_selector: port bscu.Select_Alternate -> selector.Select_Alternate;
bscu_cmdnor_to_selector: port bscu.cmd_nor -> selector.cmd_nor;
bscu_cmdalt_to_selector: port bscu.cmd_alt -> selector.cmd_alt;
selector_to_wheel: bus access selector.output <-> wheel.input;
end wbs.basic;
--
-- 版本有更多的实施细节,显示了液压系统的细节。
--
system implementation wbs.detailed extends wbs.generic
subcomponents
selector: refined to system valves::selector_detailed {Classifier_Substitution_Rule => Type_Extension;};
shutoff: system valves::boolean_shutoff;
green_skid: system valves::cmd_shutoff;
blue_skid: system valves::cmd_shutoff;
wheel: refined to system wheel::wheel_two_inputs.i {Classifier_Substitution_Rule => Type_Extension;};
connections
-- 我们将蓝色泵直接连接到选择阀。
-- 对于绿色泵,我们将其连接到关闭阀,关闭阀随后连接到选择器阀。
blue_to_selector: bus access blue_pump.pressure_output <-> selector.blue_input;
green_to_shutoff: bus access green_pump.pressure_output <-> shutoff.input;
shutoff_to_selector: bus access shutoff.output <-> selector.green_input;
bscu_to_shutoff: port bscu.Select_Alternate -> shutoff.boolean_input;
bscu_to_selector: port bscu.Select_Alternate -> selector.select_alternate;
-- 将来自BSCU的指令连接到滑动阀门
bscu_to_gskid: port bscu.cmd_nor -> green_skid.cmd_input;
bscu_to_bskid: port bscu.cmd_alt -> blue_skid.cmd_input;
-- 将选择器的输出压力连接到防滑部件上
selector_to_gskid: bus access selector.green_output <-> green_skid.input;
selector_to_bskid: bus access selector.blue_output <-> blue_skid.input;
-- 将防滑系统连接到车轮上。在这个版本中,我们看到轮子有两条获得压力的路径。
-- 我们认为这是一个物理模型,而不是逻辑模型。
bskid_to_wheel: bus access blue_skid.output <-> wheel.blue_input;
gskid_to_wheel: bus access green_skid.output <-> wheel.green_input;
end wbs.detailed;
system implementation wbs.federated extends wbs.detailed
subcomponents
bscu: refined to system bscu::bscu.federated;
end wbs.federated;
system implementation wbs.ima extends wbs.detailed
subcomponents
bscu: refined to system bscu::bscu.ima;
annex resolute {**
prove contain_two_power_supply()
prove contain_two_selector_valve()
prove contain_two_bscu()
**};
end wbs.ima;
end wbs;


















 667
667

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











