







实现效果:
小车(移动机器人)仿真平台
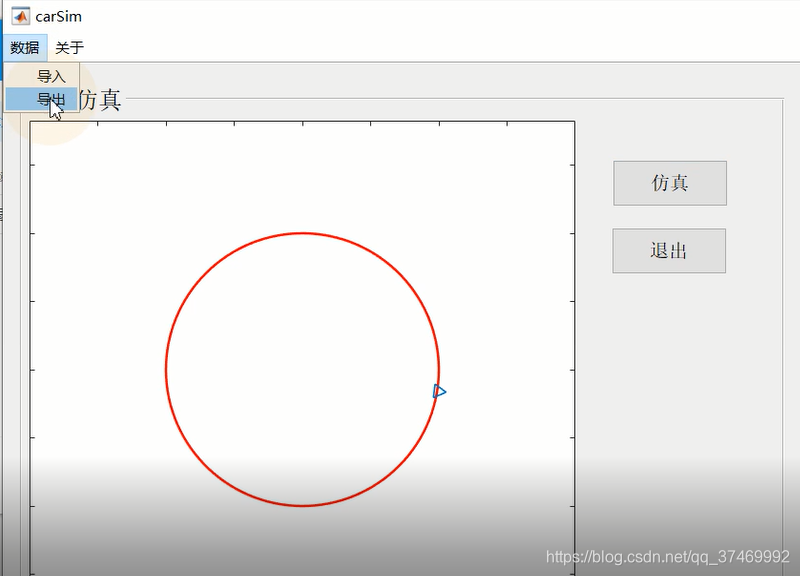
(1)以等腰三角形表示一个小车,三角形顶点指向为小车的朝向,即前进方向。如下图所示,那么我们只要求用三角形表示,而不是图中的形状
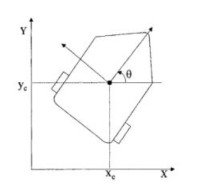
其运动学模型如下:
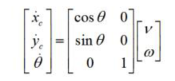
(2)可以在窗口输入给定的线速度和角速度以驱动小车的运动,它们可以是时间序列数据,也可以是小车的位置(xc和yc)和方向(θ)的函数。
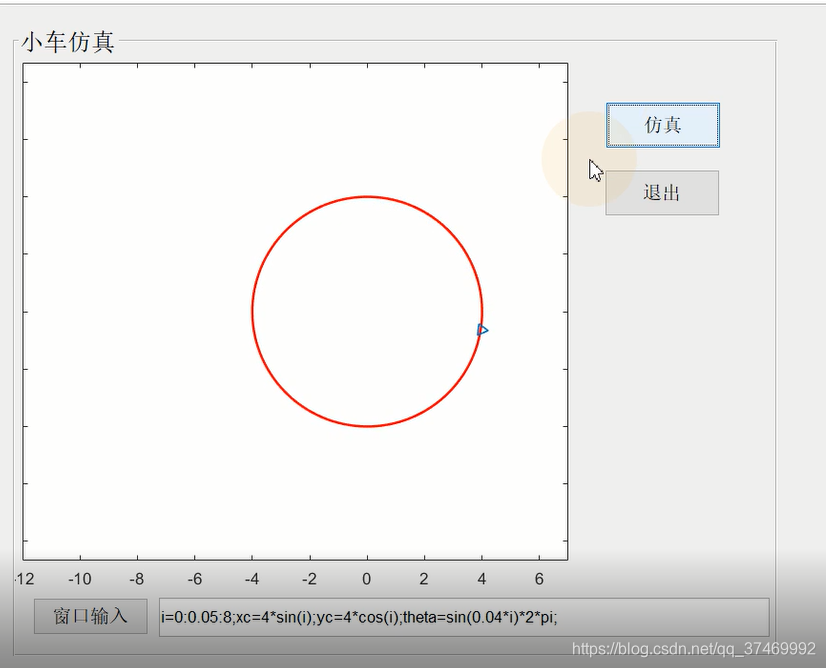
(3)两个按钮,一个执行小车驱动任务并动态绘制小车的运动轨迹,一个退出仿真平台。
(4)利用快捷菜单,对所得轨迹曲线进行设置;
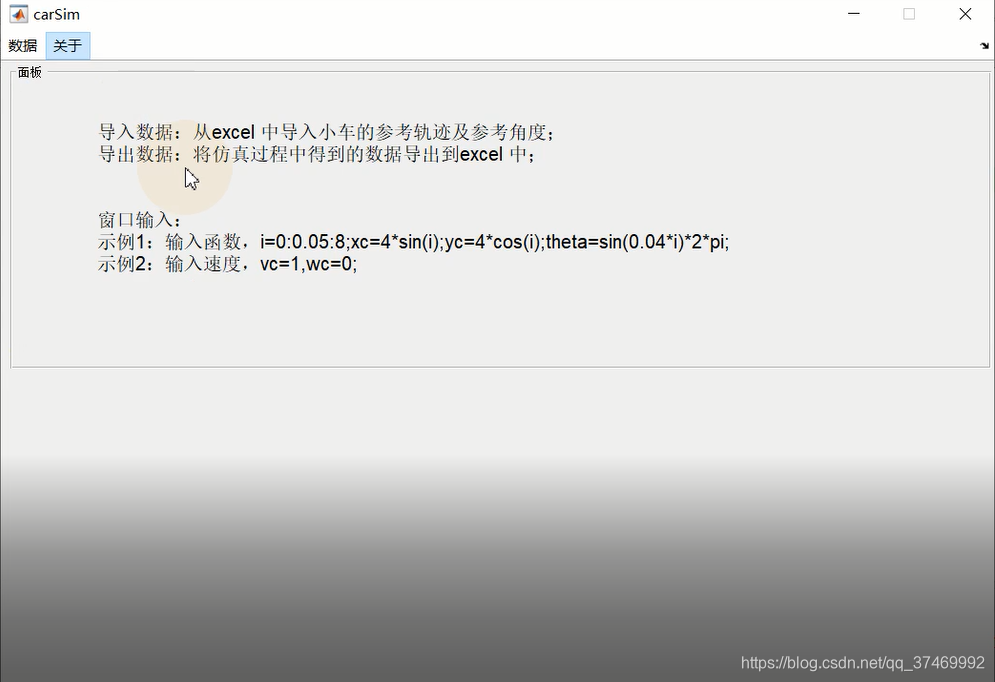
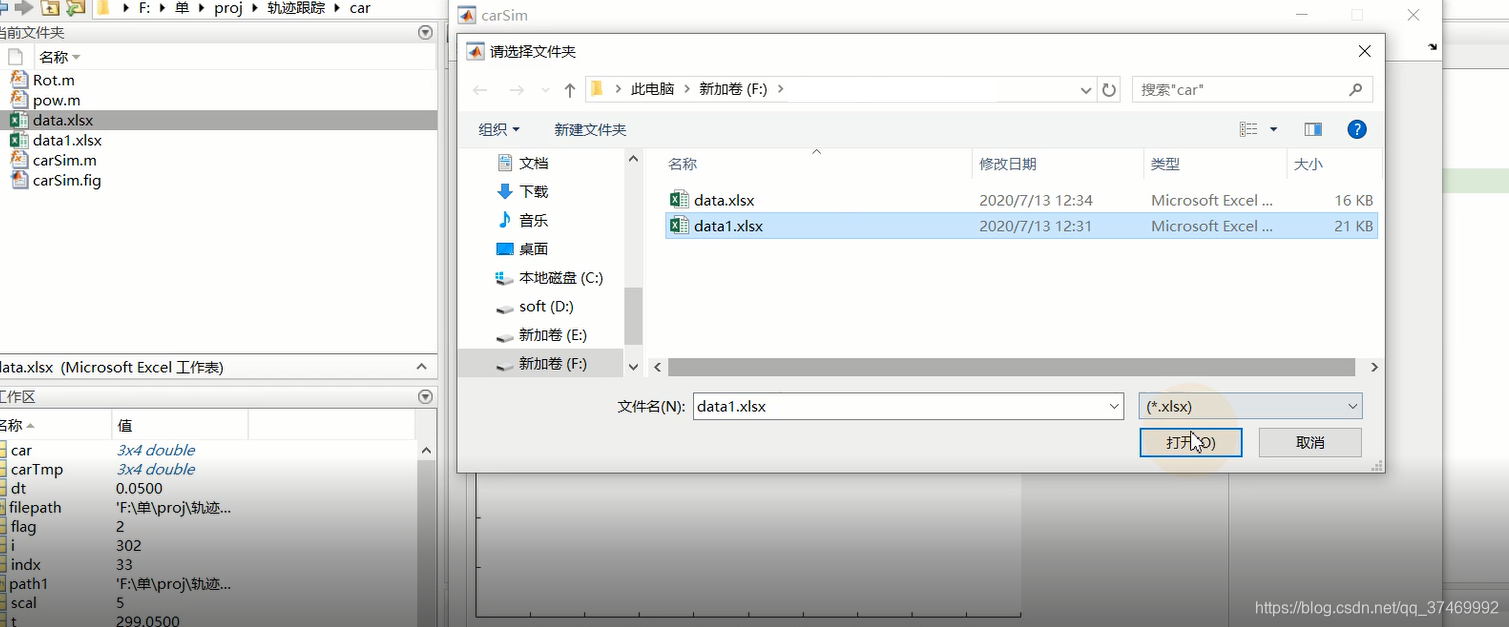
(5)界面以"小车仿真"为名,溢出默认的菜单,自定义一级菜单"数据" - 二级菜单"导入"、"导出"即读入已有的位置数据以驱动小车运动,"导出"即将当前所得的位置数据、角度数据保存到本低。自定义一级菜单"关于"。“关于”调出该平台的使用说明文档。
(6)生成可执行文件。
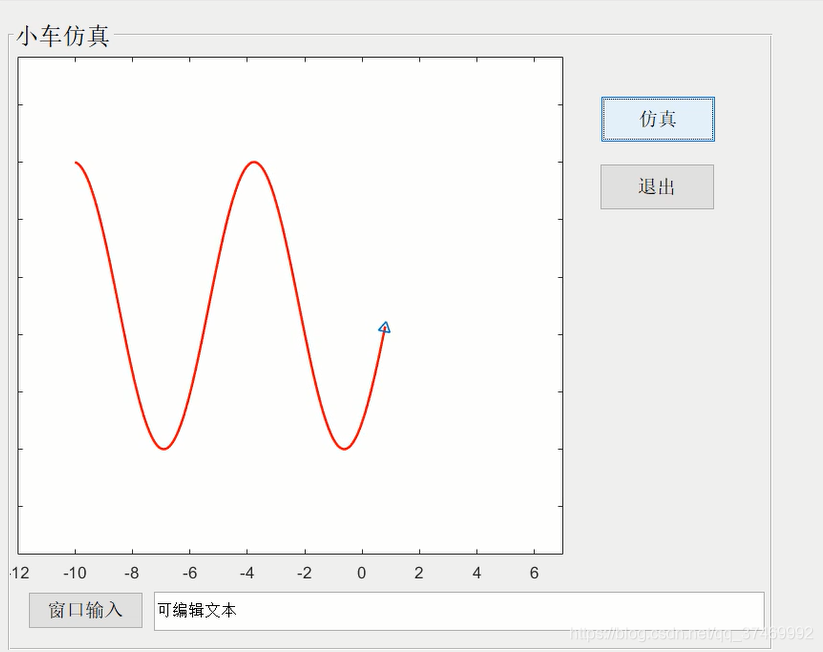
相关仿真结果如下图所示:
导入正弦轨迹并仿真:
定义位置、角度间的函数
帮助界面:
数据读取界面
数据保存界面
长期从事机器人学相关研究,涉及机械臂、轮式机器人、四足机器人的建模及仿真,可共同探讨机器人相关问题,可指导课程设计及毕业设计,详询:QQ:3531225003

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









