







TraceX使用
简介
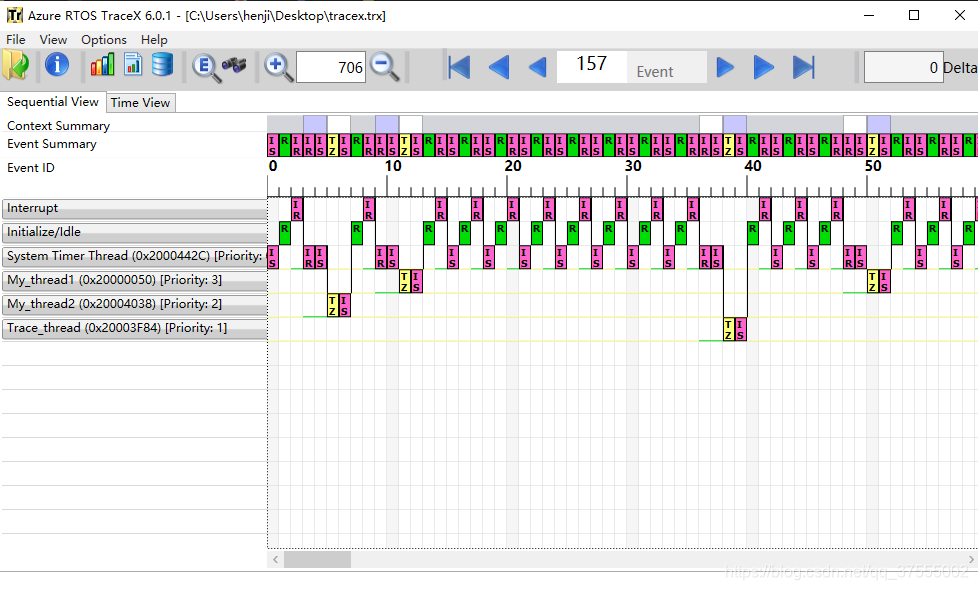
Azure RTOS TraceX是一个Microsoft系统分析工具,它显示由运行在嵌入式目标上的ThreadX收集的系统事件信息。用户负责将存储在嵌入式目标中RAM中的跟踪缓冲区转移到主机上的二进制文件中。然后,用户可以使用TraceX打开此文件,并以图形方式分析目标事件,诊断系统问题并调整工作的应用程序以提高性能和资源管理。
TraceX 软件
Trace API
- tx_trace_enable:启用事件跟踪
- tx_trace_event_filter:过滤指定的事件
- tx_trace_event_unfilter:取消过滤指定的事件
- tx_trace_disable:禁用事件跟踪
- tx_trace_isr_enter_insert:插入ISR输入跟踪事件
- tx_trace_isr_exit_insert:插入ISR退出跟踪事件
- tx_trace_buffer_full_notify:注册跟踪缓冲区已满的应用程序回调
- tx_trace_user_event_insert:插入用户事件
tx_trace_enable
UINT tx_trace_enable (VOID *trace_buffer_start,
ULONG trace_buffer_size, ULONG registry_entries);
输入参数
- trace_buffer_start:指向用户提供的跟踪缓冲区的开始的指针。
- trace_buffer_size:跟踪缓冲区的内存中的字节总数。跟踪缓冲区越大,它可以存储的条目越多。
- Registry_entries:要保留在跟踪注册表中的应用程序ThreadX对象的数量。注册表用于将对象地址与对象名称相关联。这对于GUI跟踪分析工具非常有用。
返回值
- TX_SUCCESS(0x00)成功的事件跟踪启用。
- TX_SIZE_ERROR(0x05)指定的跟踪缓冲区大小太小。它必须足够大以容纳跟踪头,对象注册表和至少一个跟踪条目。
- TX_NOT_DONE(0x20)事件跟踪已启用。
- TX_FEATURE_NOT_ENABLED(0xFF)系统未在启用跟踪的情况下进行编译。
tx_trace_buffer_full_notify
VOID tx_trace_buffer_full_notify (VOID (*full_buffer_callback)(VOID *));
输入参数
- full_buffer_callback:跟踪缓冲区已满时调用的应用程序函数。NULL值将禁用通知回调。
example
trace_is_full(void *trace_buffer_start)
{
/*停止跟踪 or 另辟buffer*/
}
/* 注册回调函数 */
tx_trace_buffer_full_notify (trace_is_full);
生成跟踪buf
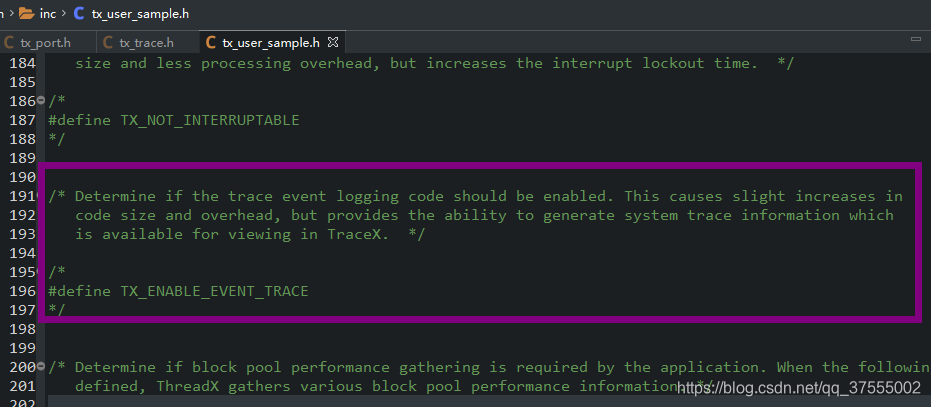
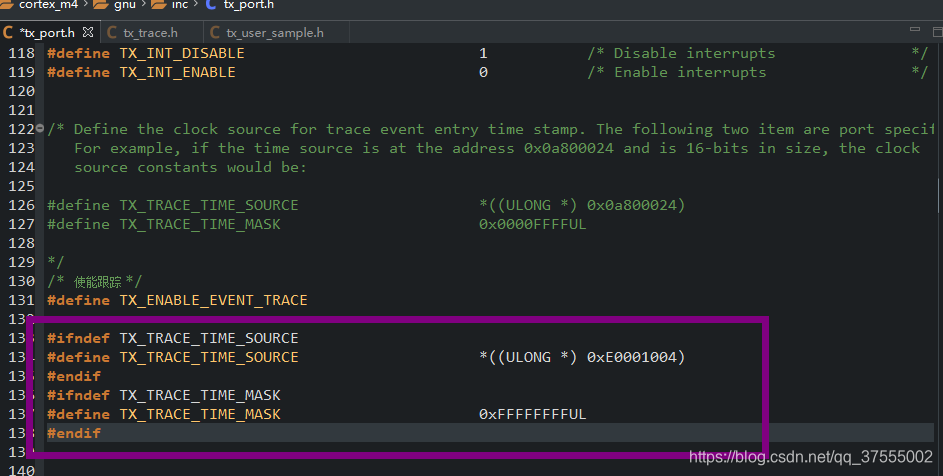
- 启用宏定义 TX_ENABLE_EVENT_TRACE (一般在tx_user.h内开启,具体的内容在tx_port.h & tx_trace.h)
这里直接在tx_port.h里面定义了,源码下tx_user_sample.h(修改为tx_user.h 里面根据需要开启)
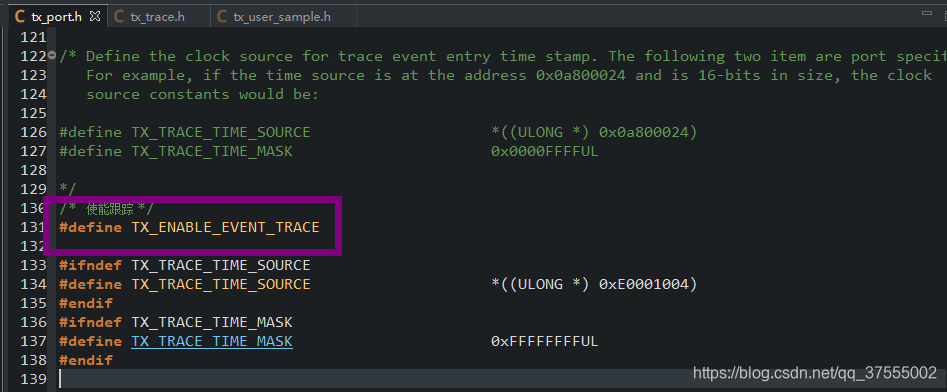
- 定义时间戳常量(这里使用的是默认的没改…)
- 调用 tx_trace_enable( )
在main.c 中定义好相关参数,然后只要把 tx_trace_enable( ) 放到tx_application_define()最前面,就是首行调用就可以了十分简单。也可放到任意一个线程任务while(1)循环里面,(这里trace单独一个线程了,以示区分)代码大致入下如下图所示:
/*
*
* SPDX-License-Identifier: GPL-2.0-or-later
* main.c
* Change Logs:
* Date Author Notes
* 2020年8月21日 henji the first version
*/
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "tx_api.h"
/* USER CODE END Includes */
........
/* USER CODE BEGIN PV */
TX_THREAD my_thread_1;
TX_THREAD my_thread_2;
TX_THREAD trace_thread;
uint8_t pData[] = "=========ThreadX=========\n";
uint8_t pData1[] = "I am thread1 ";
uint8_t pData2[] = "I am thread2 ";
/* Tracex使用 */
/*跟踪缓冲区的内存大小*/
#define trace_buffer_size 64000
/*要保留在跟踪注册表中的应用程序ThreadX对象的数量*/
#define registry_entries 40
UCHAR trace_buffer_start[trace_buffer_size];
UINT trace_status;
/* USER CODE END PV */
int main(void)
{
.......
/* USER CODE BEGIN 2 */
tx_kernel_enter(); //threadx 入口
/* USER CODE END 2 */
while (1);
}
/* USER CODE BEGIN 4 */
void thread1_entry(ULONG entry_input)
{
INT count = 0;
uint8_t init_data[] = "start now";
while (1)
{
HAL_UART_Transmit(&huart1, pData1, sizeof(pData1), HAL_MAX_DELAY);
if (count == 0)
{
HAL_UART_Transmit(&huart1, init_data, sizeof(init_data),
HAL_MAX_DELAY);
}
count++;
HAL_GPIO_TogglePin(GPIOE, GPIO_PIN_7 | GPIO_PIN_8);
tx_thread_sleep(100);
}
}
void thread2_entry(ULONG entry_input)
{
INT count = 0;
while (1)
{
HAL_UART_Transmit(&huart1, pData2, sizeof(pData2), HAL_MAX_DELAY);
if (count == 3)
{
/*挂起线程1*/
tx_thread_suspend(&my_thread_1);
}
else if (count == 6)
{
/*恢复线程1*/
tx_thread_resume(&my_thread_1);
}
else if (count == 9)
{
/*终止线程1*/
tx_thread_terminate(&my_thread_1);
}
else if (count == 12)
{
/*重置线程1*/
tx_thread_reset(&my_thread_1);
/*恢复线程1*/
tx_thread_resume(&my_thread_1);
}
else if (count == 13)
{
/*终止线程1*/
//tx_thread_terminate(&my_thread_1);
//tx_thread_terminate(&my_thread_2);
}
else
{
;
}
count++;
tx_thread_sleep(200);
}
}
void trace_thread_input(ULONG entry_input)
{
while (1)
{
/*使能追踪*/
trace_status = tx_trace_enable(&trace_buffer_start, trace_buffer_size, registry_entries);
if (trace_status == TX_SUCCESS)
{
; //使能成功
}
if (trace_status == TX_NOT_DONE)
{
; //在追踪
}
tx_thread_sleep(100);
}
}
void my_entry_exit_notify(TX_THREAD *thread_ptr, UINT condition)
{
uint8_t entry_data[] = " thread1-entry ";
uint8_t exit_data[] = " thread1-exit ";
/* Determine if the thread was entered or exited. */
if (condition == TX_THREAD_ENTRY)
{
/* Thread entry! */
HAL_UART_Transmit(&huart1, entry_data, sizeof(pData2), HAL_MAX_DELAY);
}
if (condition == TX_THREAD_EXIT)
{
/* Thread exit! */
HAL_UART_Transmit(&huart1, exit_data, sizeof(pData2), HAL_MAX_DELAY);
}
}
void tx_application_define(void *first_unused_memory)
{
/*线程1*/
tx_thread_create(&my_thread_1, //线程控制块指针
"my_thread1",//线程名字
thread1_entry,//线程入口函数
0,//线程入口参数
first_unused_memory,//线程的起始地址(这里偷懒,没有进行分配,直接使用未用的起始地址)
1024,//内存区域大小K
3,//优先级3 (0~TX_MAX_PRIORITES-1)0 表示最高优先级
3,//禁用抢占的最高优先级
TX_NO_TIME_SLICE,//时间切片值范围为 1 ~ 0xFFFF(TX_NO_TIME_SLICE = 0)
TX_AUTO_START//线程自动启动
);
/*线程2*/
tx_thread_create(&my_thread_2, //线程控制块指针
"my_thread2",//线程名字
thread2_entry,//线程入口函数
0,//线程入口参数
first_unused_memory+1024,//线程的起始地址+1024 (-被前面线程用掉了)
1024,//内存区域大小K
2,//优先级2 (0~TX_MAX_PRIORITES-1)0 表示最高优先级
2,//禁用抢占的最高优先级
TX_NO_TIME_SLICE,//时间切片值范围为 1 ~ 0xFFFF(TX_NO_TIME_SLICE = 0)
TX_AUTO_START//线程自动启动
);
/*trace 线程*/
tx_thread_create(&trace_thread, //线程控制块指针
"trace_thread",//线程名字
trace_thread_input,//线程入口函数
0,//线程入口参数
first_unused_memory+2048, 1024, //内存区域大小K
1,//优先级2 (0~TX_MAX_PRIORITES-1)0 表示最高优先级
1,//禁用抢占的最高优先级
TX_NO_TIME_SLICE,//时间切片值范围为 1 ~ 0xFFFF(TX_NO_TIME_SLICE = 0)
TX_AUTO_START//线程自动启动
);
/*线程进入和退出时通知*/
tx_thread_entry_exit_notify(&my_thread_1, my_entry_exit_notify);
}
/* USER CODE END 4 */
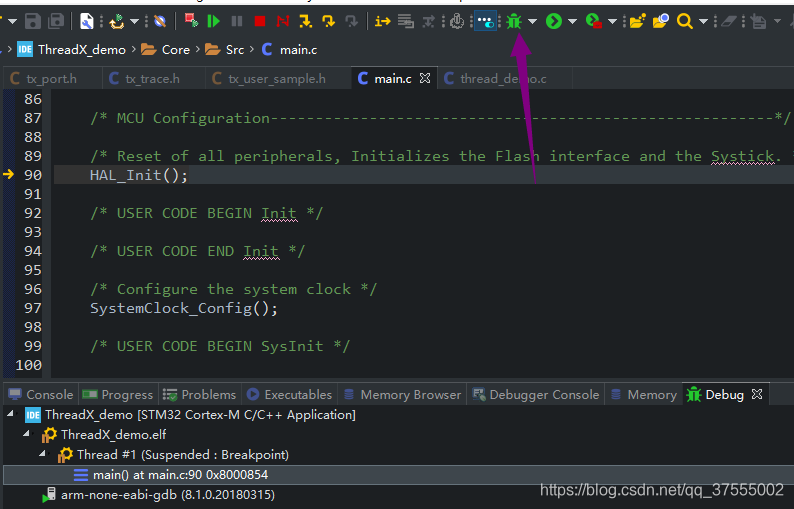
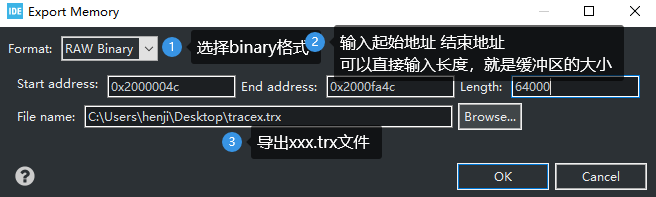
导出trx 跟踪文件
- 点击debug 进入调试状态 ,运行一会然后暂停,找到trace buffer 内存区,将数据导出。(IDE 有很多 mdk IAR ES … 这里还是选择ST公司的STM32CubeIDE , 不为什么,单纯 免费。ES 也免费,毕竟segger公司的,调试仅J-link ,STM32CubeIDE 可以支持OpenOCD 基本上满足 st-link 、 j-link 、DAP 等调试器了 )

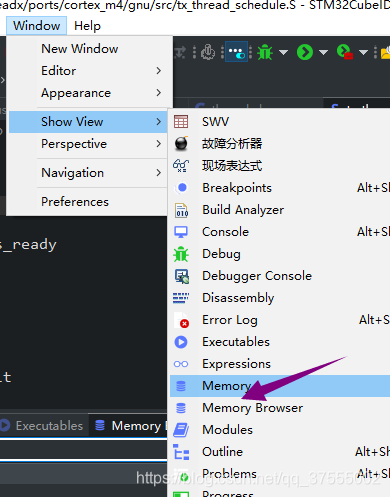
Memory && Memory Browser 都可以
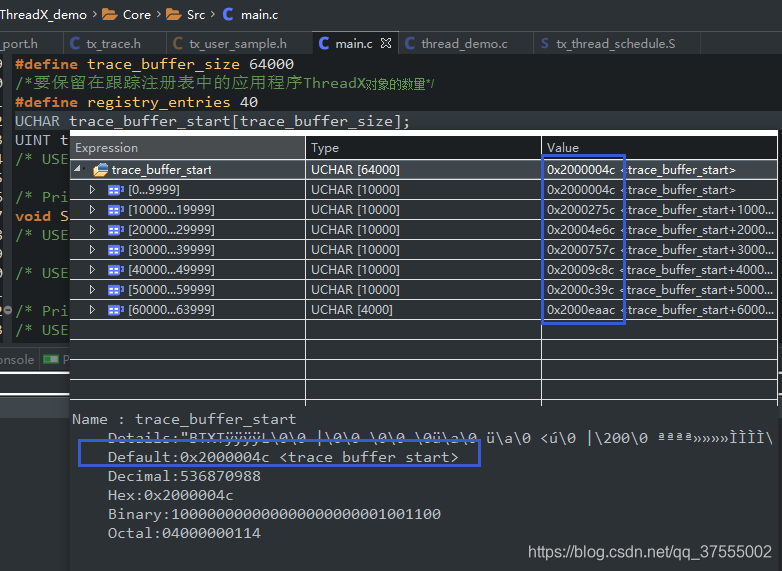
首地址只要把鼠标放在上面就可以找到了
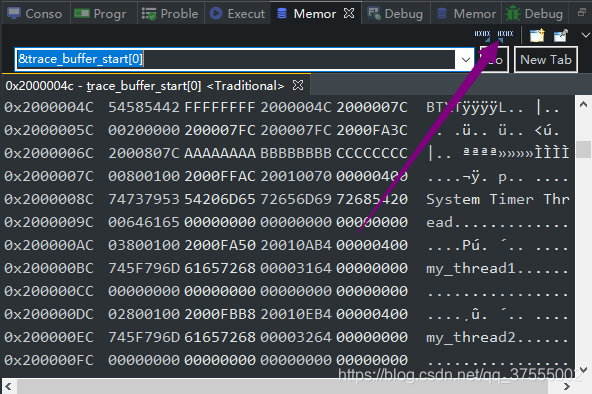
点击导出 export
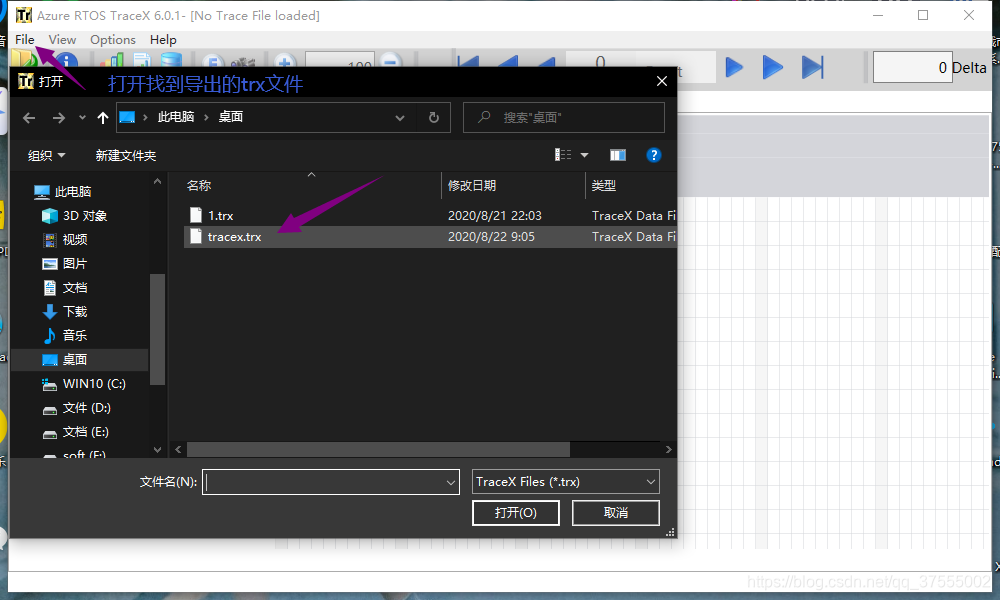
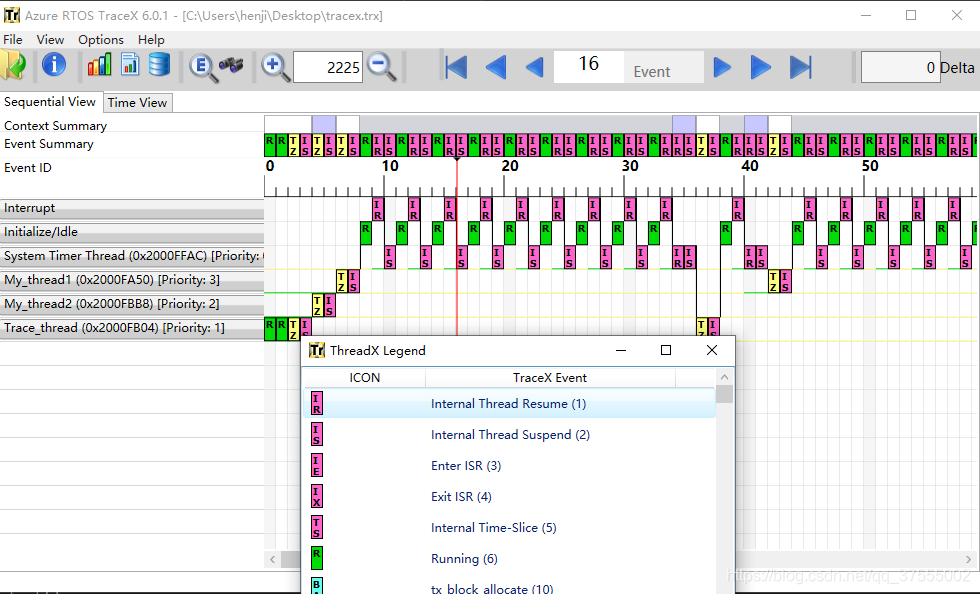
使用TraceX 导入
关于tracex更具体使用,就参考官方文档吧
完














 790
790











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









