







SLAM算法与工程实践系列文章
下面是SLAM算法与工程实践系列文章的总链接,本人发表这个系列的文章链接均收录于此
SLAM算法与工程实践系列文章链接
下面是专栏地址:
SLAM算法与工程实践系列专栏
文章目录
前言
这个系列的文章是分享SLAM相关技术算法的学习和工程实践
SLAM算法与工程实践——SLAM基本库的安装与使用(1):Eigen库
Eigen
Eigen库官网:https://eigen.tuxfamily.org/index.php?title=Main_Page
Eigen 3 官方文档:https://eigen.tuxfamily.org/dox/
安装
Eigen3是一个纯头文件的库,这个特点让使用者省去了很多安装和环境配置的麻烦
直接安装:
sudo apt-get install libeigen3-dev
或者下载源码解压缩安装包
git clone https://github.com/eigenteam/eigen-git-mirror.git
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install
#安装后 头文件安装在/usr/local/include/eigen3/
#移动头文件
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include
备注:在很多程序中 include 时经常使用 #include <Eigen/Dense> 而不是使用 #include <eigen3/Eigen/Dense> 所以要做下处理
查询版本
参考:
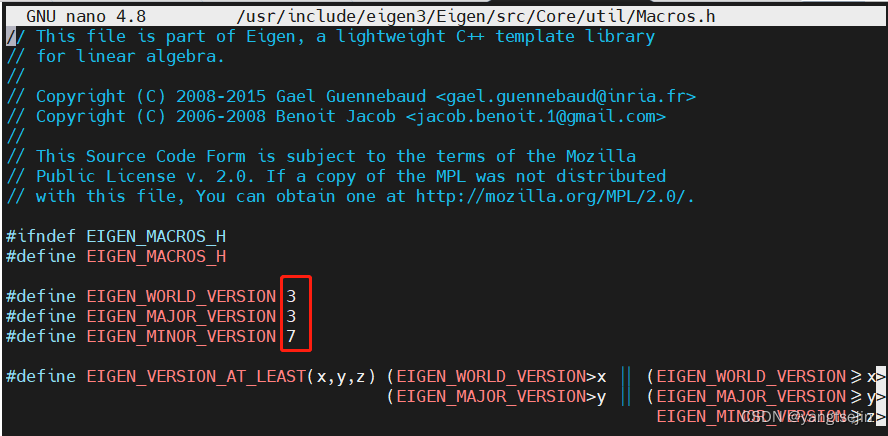
找到eigen本地目录下的Macros.h头文件查看对应的版本。
执行如下命令:
sudo nano /usr/include/eigen3/Eigen/src/Core/util/Macros.h
可以看到Eigen的版本为3.3.7
基本使用
头文件

一般情况下,只需要:
#include <Eigen/Core>
#include <Eigen/Dense>
Eign中对各种形式的表达方式总结如下。请注意每种类型都有单精度和双精度两种数据类型,而且和之前一样,不能由编译器自动转换。下面以双精度为例,你可以把最后的 d 改成 f ,即得到单精度的数据结构。
- 旋转矩阵(3×3):Eigen:Matrix.3d。
- 旋转向量(3×1):Eigen:AngleAxisd。
- 欧拉角(3×1):Eigen:Vector3d。
- 四元数(4×1):Eigen:Quaterniond
- 欧氏变换矩阵(4×4):Eigen:Isometry3d。
- 仿射变换(4×4):Eigen:Affine3d。
- 射影变换(4×4):Eigen:Projective.3d。
参考代码中对应的CMakeLists即可编译此程序。在下面的程序中,演示了如何使用Eigen中的旋转矩阵、旋转向量、欧拉角和四元数。我们用这几种旋转方式旋转一个向量v,发现结果是一样的。
同时,也演示了如何在程序中转换这几种表达方式。想进一步了解Eigen的几何模块的读者可以参考(http://eigen.tuxfamily.org/dox/group__TutorialGeometry.html)
注意:
程序代码通常和数学表示有一些细微的差别。例如,通过运算符重载,四元数和三维向量可以直接计算乘法,但在数学上则需要先把向量转成虚四元数,再利用四元数乘法进行计算,同样的情况也适用于变换矩阵乘三维向量的情况。总体而言,程序中的用法会比数学公式更灵活。
eigenMatrix.cpp
包含头文件
#include <ctime> // 用来计时
// Eigen 核心部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
一般多用到这两个头文件,Dense 里面其实已经包含了 Core 中的内容,只写 #include <Eigen/Dense> 即可
Eigen 中所有向量和矩阵都是 Eigen::Matrix,它是一个模板类。它的前三个参数为:数据类型,行,列
声明一个2*3的float矩阵
Matrix<float, 2, 3> matrix_23;
Eigen::Matrix
详细解读见官网文档:https://eigen.tuxfamily.org/dox/group__TutorialMatrixClass.html
Eigen 通过 typedef 提供了许多内置类型,不过底层仍是 Eigen::Matrix
例如 Vector3d 实质上是 Eigen::Matrix<double, 3, 1>,即三维向量
Vector3d v_3d;
这是一样的
Matrix<float, 3, 1> vd_3d;
将鼠标移动到 Vector3d 处,可以看到
typedef Eigen::Matrix<double, 3, 1> Eigen::Vector3d
Matrix3d 实质上是 Eigen::Matrix<double, 3, 3>
Matrix3d matrix_33 = Matrix3d::Zero(); //初始化为零
如果不确定矩阵大小,可以使用动态大小的矩阵
Matrix<double, Dynamic, Dynamic> matrix_dynamic;
更简单的
MatrixXd matrix_x;
MatrixXd 表示动态大小的矩阵,其定义为
typedef Eigen::Matrix<double, -1, -1> Eigen::MatrixXd
这种类型还有很多,我们不一一列举
初始化
下面是对Eigen阵的操作
输入数据(初始化),这里默认按行输入
matrix_23 << 1, 2, 3, 4, 5, 6;
输出
cout << "matrix 2x3 from 1 to 6: \n" << matrix_23 << endl;
访问矩阵元素
用()访问矩阵中的元素
cout << "print matrix 2x3: " << endl;
for (int i = 0; i < 2; i++) {
for (int j = 0; j < 3; j++) cout << matrix_23(i, j) << "\t";
cout << endl;
}
矩阵运算
矩阵和向量相乘(实际上仍是矩阵和矩阵)
v_3d << 3, 2, 1;
vd_3d << 4, 5, 6;
但是在Eigen里你不能混合两种不同类型的矩阵,像这样是错的
Matrix<double, 2, 1> result_wrong_type = matrix_23 * v_3d;
应该显式转换
Matrix<double, 2, 1> result = matrix_23.cast<double>() * v_3d;
cout << "[1,2,3;4,5,6]*[3,2,1]=" << result.transpose() << endl;
Matrix<float, 2, 1> result2 = matrix_23 * vd_3d;
cout << "[1,2,3;4,5,6]*[4,5,6]: " << result2.transpose() << endl;
注意:这里输出时转置是为了节省空间,因为计算结果为列向量,将其转置后为行向量,显示比较方便
>
同样你不能搞错矩阵的维度
试着取消下面的注释,看看Eigen会报什么错
// Eigen::Matrix<double, 2, 3> result_wrong_dimension = matrix_23.cast<double>() * v_3d;
一些矩阵运算
四则运算就不演示了,直接用±*/即可。
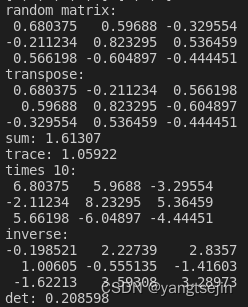
matrix_33 = Matrix3d::Random(); // 随机数矩阵
cout << "random matrix: \n" << matrix_33 << endl;
cout << "transpose: \n" << matrix_33.transpose() << endl; // 转置
cout << "sum: " << matrix_33.sum() << endl; // 各元素和
cout << "trace: " << matrix_33.trace() << endl; // 迹
cout << "times 10: \n" << 10 * matrix_33 << endl; // 数乘
cout << "inverse: \n" << matrix_33.inverse() << endl; // 逆
cout << "det: " << matrix_33.determinant() << endl; // 行列式
结果如下
特征值
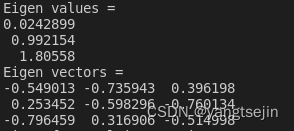
实对称矩阵可以保证对角化成功
matrix_33 = Matrix3d::Random(); // 随机数矩阵
SelfAdjointEigenSolver<Matrix3d> eigen_solver(matrix_33.transpose() * matrix_33);
cout << "Eigen values = \n" << eigen_solver.eigenvalues() << endl;
cout << "Eigen vectors = \n" << eigen_solver.eigenvectors() << endl;
这里 Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> 的意义为:
class Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d>
Computes eigenvalues and eigenvectors of selfadjoint matrices
模板参数:
_MatrixType – the type of the matrix of which we are computing the eigendecomposition; this is expected to be an instantiation of the Matrix class template. A matrix
结果如下;
解方程
我们求解 matrix_NN * x = v_Nd 这个方程,即求解 A x = b Ax=b Ax=b
N的大小在前边的宏里定义,它由随机数生成
直接求逆自然是最直接的,但是求逆运算量大
#define MATRIX_SIZE 50
Matrix<double, MATRIX_SIZE, MATRIX_SIZE> matrix_NN
= MatrixXd::Random(MATRIX_SIZE, MATRIX_SIZE);
matrix_NN = matrix_NN * matrix_NN.transpose(); // 保证半正定
Matrix<double, MATRIX_SIZE, 1> v_Nd = MatrixXd::Random(MATRIX_SIZE, 1);
clock_t time_stt = clock(); // 计时
// 直接求逆
Matrix<double, MATRIX_SIZE, 1> x = matrix_NN.inverse() * v_Nd;
cout << "time of normal inverse is "
<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;
cout << "x = " << x.transpose() << endl;
结果为:

矩阵分解
矩阵分解详见:https://eigen.tuxfamily.org/dox/group__TutorialLinearAlgebra.html
通常用矩阵分解来求,例如QR分解,速度会快很多
Matrix<double, MATRIX_SIZE, MATRIX_SIZE> matrix_NN
= MatrixXd::Random(MATRIX_SIZE, MATRIX_SIZE);
matrix_NN = matrix_NN * matrix_NN.transpose(); // 保证半正定
Matrix<double, MATRIX_SIZE, 1> v_Nd = MatrixXd::Random(MATRIX_SIZE, 1);
time_stt = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
cout << "time of Qr decomposition is "
<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;
cout << "x = " << x.transpose() << endl;
结果为:

在QR分解中
#include <iostream>
#include <Eigen/Dense>
int main()
{
Eigen::Matrix3f A;
Eigen::Vector3f b;
A << 1,2,3, 4,5,6, 7,8,10;
b << 3, 3, 4;
std::cout << "Here is the matrix A:\n" << A << std::endl;
std::cout << "Here is the vector b:\n" << b << std::endl;
Eigen::Vector3f x = A.colPivHouseholderQr().solve(b);
std::cout << "The solution is:\n" << x << std::endl;
}
输出结果:
Here is the matrix A:
1 2 3
4 5 6
7 8 10
Here is the vector b:
3
3
4
The solution is:
-2
1
1
在本例中,colPivHouseholderQr() 方法返回类 ColPivHouse holderQR 的对象。由于这里的矩阵是 Matrix3f 类型的,所以这一行可能被替换为:
ColPivHouseholderQR<Matrix3f> dec(A);
Vector3f x = dec.solve(b);
对于正定矩阵,还可以用cholesky分解来解方程
time_stt = clock();
x = matrix_NN.ldlt().solve(v_Nd);
cout << "time of ldlt decomposition is "
<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;
cout << "x = " << x.transpose() << endl;
结果为:

此处,ColPivHouseholderQR是一个带有列主的QR分解。对于本教程来说,这是一个很好的折衷方案,因为它适用于所有矩阵,同时速度很快。
以下是一些其他分解的表格,您可以根据矩阵、您试图解决的问题以及您想要进行的权衡进行选择:
| Decomposition | Method | Requirements on the matrix | Speed (small-to-medium) | Speed (large) | Accuracy |
|---|---|---|---|---|---|
| PartialPivLU | partialPivLu() | Invertible | ++ | ++ | + |
| FullPivLU | fullPivLu() | None | - | - - | +++ |
| HouseholderQR | householderQr() | None | ++ | ++ | + |
| ColPivHouseholderQR | colPivHouseholderQr() | None | + | - | +++ |
| FullPivHouseholderQR | fullPivHouseholderQr() | None | - | - - | +++ |
| CompleteOrthogonalDecomposition | completeOrthogonalDecomposition() | None | + | - | +++ |
| LLT | llt() | Positive definite | +++ | +++ | + |
| LDLT | ldlt() | Positive or negative semidefinite | +++ | + | ++ |
| BDCSVD | bdcSvd() | None | - | - | +++ |
| JacobiSVD | jacobiSvd() | None | - | - - - | +++ |
要获得不同分解的真实相对速度的概述,请查看此benchmark .
方阵是对称的,对于过约束矩阵,报告的时间包括计算对称协方差矩阵的成本 A T A A^TA ATA 对于前四个基于 Cholesky 和 LU 的求解器,用*****符号表示(表的右上角部分)。计时以毫秒为单位,因素与LLT分解有关, LLT分解速度最快,但也是最不通用和鲁棒的。
| solver/size | 8x8 | 100x100 | 1000x1000 | 4000x4000 | 10000x8 | 10000x100 | 10000x1000 | 10000x4000 |
|---|---|---|---|---|---|---|---|---|
| LLT | 0.05 | 0.42 | 5.83 | 374.55 | 6.79 * | 30.15 * | 236.34 * | 3847.17 * |
| LDLT | 0.07 (x1.3) | 0.65 (x1.5) | 26.86 (x4.6) | 2361.18 (x6.3) | 6.81 (x1) * | 31.91 (x1.1) * | 252.61 (x1.1) * | 5807.66 (x1.5) * |
| PartialPivLU | 0.08 (x1.5) | 0.69 (x1.6) | 15.63 (x2.7) | 709.32 (x1.9) | 6.81 (x1) * | 31.32 (x1) * | 241.68 (x1) * | 4270.48 (x1.1) * |
| FullPivLU | 0.1 (x1.9) | 4.48 (x10.6) | 281.33 (x48.2) | - | 6.83 (x1) * | 32.67 (x1.1) * | 498.25 (x2.1) * | - |
| HouseholderQR | 0.19 (x3.5) | 2.18 (x5.2) | 23.42 (x4) | 1337.52 (x3.6) | 34.26 (x5) | 129.01 (x4.3) | 377.37 (x1.6) | 4839.1 (x1.3) |
| ColPivHouseholderQR | 0.23 (x4.3) | 2.23 (x5.3) | 103.34 (x17.7) | 9987.16 (x26.7) | 36.05 (x5.3) | 163.18 (x5.4) | 2354.08 (x10) | 37860.5 (x9.8) |
| CompleteOrthogonalDecomposition | 0.23 (x4.3) | 2.22 (x5.2) | 99.44 (x17.1) | 10555.3 (x28.2) | 35.75 (x5.3) | 169.39 (x5.6) | 2150.56 (x9.1) | 36981.8 (x9.6) |
| FullPivHouseholderQR | 0.23 (x4.3) | 4.64 (x11) | 289.1 (x49.6) | - | 69.38 (x10.2) | 446.73 (x14.8) | 4852.12 (x20.5) | - |
| JacobiSVD | 1.01 (x18.6) | 71.43 (x168.4) | - | - | 113.81 (x16.7) | 1179.66 (x39.1) | - | - |
| BDCSVD | 1.07 (x19.7) | 21.83 (x51.5) | 331.77 (x56.9) | 18587.9 (x49.6) | 110.53 (x16.3) | 397.67 (x13.2) | 2975 (x12.6) | 48593.2 (x12.6) |
*****: 此分解不支持对过度约束问题的直接最小二乘求解,并且报告的时间包括形成对称协方差矩阵的成本 A T A A^TA ATA.
eigenGeometry.cpp
旋转向量
Eigen/Geometry 模块提供了各种旋转和平移的表示
3D 旋转矩阵直接使用 Matrix3d 或 Matrix3f
Matrix3d rotation_matrix = Matrix3d::Identity();
旋转向量使用 AngleAxis,详情见:https://eigen.tuxfamily.org/dox/classEigen_1_1AngleAxis.html
AngleAxisf for float
AngleAxisd for double
注意:
此类的目的不是用来存储旋转变换,而是为了更容易地创建其他旋转(Quaternion, rotation Matrix)和变换对象。
设置 AngleAxis 对象时,必须将其初始化为弧度制的角度和归一化的轴矢量。
如果轴向量未归一化,则角度轴对象表示无效旋转!
其构造为:
Eigen::AngleAxis< Scalar_ >::AngleAxis ( const Scalar & angle,
const MatrixBase< Derived > & axis
)
由其衍生出的AngleAxisd 的定义如下
typedef Eigen::AngleAxis<double> Eigen::AngleAxisd
它底层不直接是Matrix,但运算可以当作矩阵(因为重载了运算符)
AngleAxisd rotation_vector(M_PI / 4, Vector3d(0, 0, 1)); //沿 Z 轴旋转 45 度
cout.precision(3); // 设置输出精度
cout << "rotation matrix =\n" << rotation_vector.matrix() << endl; //用matrix()转换成矩阵
注意:这里使用
M_PI时要包含头文件#include <cmath>
也可以直接赋值
rotation_matrix = rotation_vector.toRotationMatrix();
结果为:
用 AngleAxis 可以进行坐标变换
Vector3d v(1, 0, 0);
Vector3d v_rotated = rotation_vector * v;
cout << "(1,0,0) after rotation (by angle axis) = " << v_rotated.transpose() << endl;
或者用旋转矩阵
v_rotated = rotation_matrix * v;
cout << "(1,0,0) after rotation (by matrix) = " << v_rotated.transpose() << endl;
结果为:

欧拉角
可以将旋转矩阵直接转换成欧拉角
Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0); // ZYX顺序,即yaw-pitch-roll顺序
cout << "yaw pitch roll = " << euler_angles.transpose() << endl;
结果为:

欧氏变换矩阵使用 Eigen::Isometry,其定义为
typedef Eigen::Transform<double, 3, 1> Eigen::Isometry3d
详见:https://eigen.tuxfamily.org/dox/classEigen_1_1Hyperplane.html#afb4d86eb3d2bb8311681067df71499de
使用
Isometry3d T = Isometry3d::Identity(); // 虽然称为3d,实质上是4*4的矩阵
T.rotate(rotation_vector); // 按照rotation_vector进行旋转
T.pretranslate(Vector3d(1, 3, 4)); // 把平移向量设成(1,3,4)
cout << "Transform matrix = \n" << T.matrix() << endl;
结果为:
用变换矩阵进行坐标变换
Vector3d v_transformed = T * v; // 相当于R*v+t
cout << "v tranformed = " << v_transformed.transpose() << endl;
注意:这里已经对乘号做了重载,所以T为四维,乘以3维的v,可以得到答案
结果为:

对于仿射和射影变换,使用 Eigen::Affine3d 和 Eigen::Projective3d 即可,略
四元数
详见:
https://eigen.tuxfamily.org/dox/classEigen_1_1Quaternion.html
https://eigen.tuxfamily.org/dox/classEigen_1_1QuaternionBase.html
可以直接把AngleAxis赋值给四元数,反之亦然
Quaterniond q = Quaterniond(rotation_vector);
cout << "quaternion from rotation vector = " << q.coeffs().transpose()
<< endl; // 请注意coeffs的顺序是(x,y,z,w),w为实部,前三者为虚部
也可以把旋转矩阵赋给它
q = Quaterniond(rotation_matrix);
cout << "quaternion from rotation matrix = " << q.coeffs().transpose() << endl;
结果为:

这里的coeffs()的返回类型为Vector4d 即4维向量
inline Eigen::Vector4d &Eigen::Quaterniond::coeffs()
使用四元数旋转一个向量,使用重载的乘法即可
v_rotated = q * v; // 注意数学上是qvq^{-1},这里做了符号重载而已
cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl;
结果为:

用常规向量乘法表示,则应该如下计算
cout << "should be equal to " << (q * Quaterniond(0, 1, 0, 0) * q.inverse()).coeffs().transpose() << endl;
结果为:

注意:
Eigen库中的四元素存储排列为:前三位为虚部,第四维为实部。
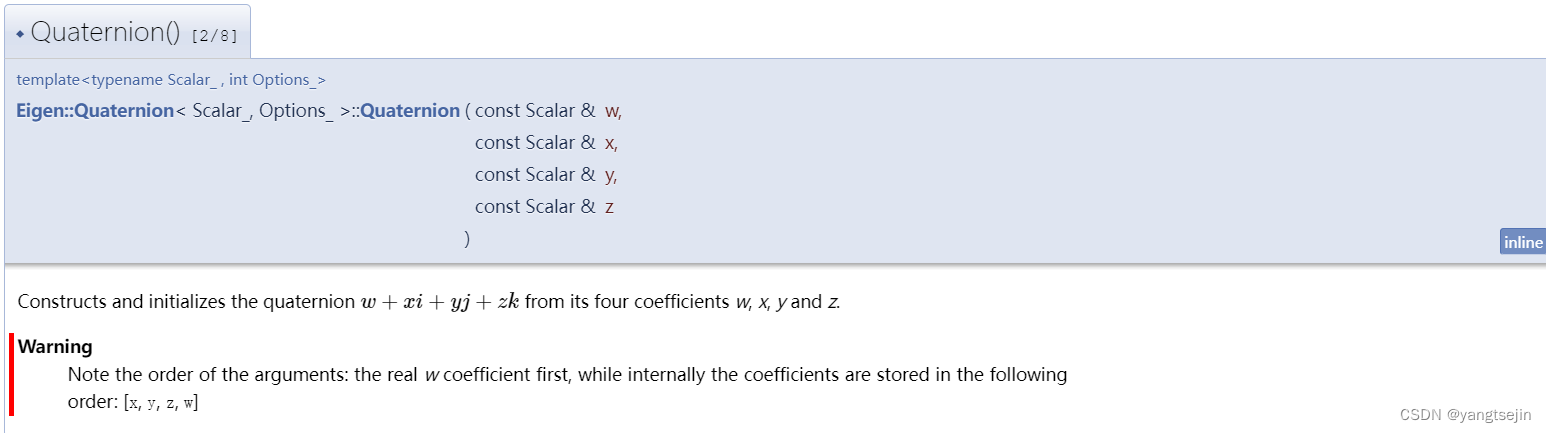
但是初始化时,仍然为第一维为实部,后面三维为虚部,即
四元数Eigen::Quaterniond 的正确初始化顺序为Eigen::Quaterniond(w,x,y,z)
而 coeffs的顺序是(x,y,z,w),w 为实部,前三者为虚部
Warning
Note the order of the arguments: the real w coefficient first, while internally the coefficients are stored in the following order: [
x,y,z,w]书本上的定义为:第一维为实部,后面三维为虚部
visualizeGeometry.cpp
特征值计算
参考:
Eigen::SelfAdjointEigenSolver类计算自伴随矩阵的特征值和特征向量,头文件是#include <Eigen/Eigenvalues>。对于标量 λ \lambda λ 和向量 v v v ,使得 A v = λ V Av=\lambda V Av=λV。SelfAdjointEigenSolver类功能就是计算自伴随矩阵的特征值和特征向量。
自伴随矩阵主对角线上的元素都是实数的,其特征值也是实数。如果 D D D 是特征值在对角线上的对角矩阵, V V V 是以特征向量为列的矩阵,则 a = V D V − 1 a=VDV^{-1} a=VDV−1 (对于自伴矩阵,矩阵 V V V 总是可逆的),这称为特征分解。
特征值及对应的特征向量计算,在矩阵分析中占有重要位置。基于Eigen的特征值计算如下:
Eigen::MatrixXd m = Eigen::MatrixXd::Random(3,3);
//构造一个实对称矩阵,SelfAdjointEigenSolver模板类,专门计算特征值和特征向量
Eigen::MatrixXd mTm = m.transpose() * m;//构成中心对其的协方差矩阵
//计算
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> eigen_solver(mTm);
//取出特征值和特征向量
Eigen::VectorXd eigenvalues = eigen_solver.eigenvalues();
Eigen::MatrixXd eigenvectors = eigen_solver.eigenvectors();
Eigen::VectorXd v0 = eigenvectors.col(0);// 因为特征值一般按从小到大排列,所以col(0)就是最小特征值对应的特征向量
出现的错误
将角轴转换为旋转矩阵时,提示
不存在从 "Eigen::Matrix<double, 3, 3, 0, 3, 3> () const" 转换到 "Eigen::Matrix<double, 3, 3, 0, 3, 3>" 的适当构造函数C/C++(415)
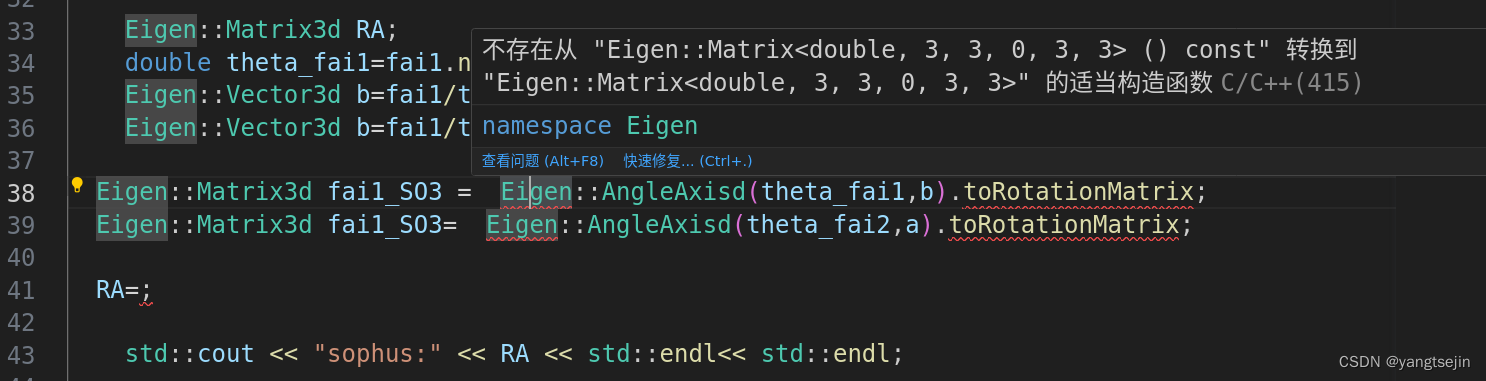
toRotationMatrix() 方法要加冒号
Eigen::Matrix3d fai1_SO3 = Eigen::AngleAxisd(fai1.norm(),fai1.normalized()).toRotationMatrix();
Eigen::Matrix3d fai2_SO3= Eigen::AngleAxisd(theta_fai2,a).toRotationMatrix();
常见用法
参考:
1、行优先和列优先
矩阵默认是列优先,向量只能是列优先.注意:在Eigen中行优先的矩阵会在其名字中包含有row,否则就是列优先。
2、<<输入是一行一行输入,不管该矩阵是否是行优先还是列优先.
在Eigen中重载了"<<"操作符,通过该操作符即可以一个一个元素的进行赋值,也可以一块一块的赋值。另外也可以使用下标进行复
3\索引:MatrixXd矩阵只能用(),VectorXd不仅能用()还能用[]
在矩阵的访问中,行索引总是作为第一个参数,需注意Eigen中遵循大家的习惯让矩阵、数组、向量的下标都是从0开始。矩阵元素的访问可以通过()操作符完成,例如m(2,3)即是获取矩阵m的第2行第3列元素(注意行列数从0开始)
4、重置矩阵大小
当前矩阵的行数、列数、大小可以通过rows(),cols()和size()来获取,对于动态矩阵可以通过resize()函数来动态修改矩阵的大小.
需注意:
(1) 固定大小的矩阵是不能使用resize()来修改矩阵的大小;
(2) resize()函数会析构掉原来的数据,因此调用resize()函数之后将不能保证元素的值不改变。
(3) 使用“=”操作符操作动态矩阵时,如果左右边的矩阵大小不等,则左边的动态矩阵的大小会被修改为右边的大小。
5、MatrixXd和Vector2d的构造 注意!
矩阵的构造函数中只提供行列数、元素类型的构造参数,而不提供元素值的构造,对于比较小的、固定长度的向量提供初始化元素的定义,
6、矩阵的块操作:有三种使用方法:
matrix.block(i,j, p, q) : 表示返回从矩阵(i, j)开始,每行取p个元素,每列取q个元素;
matrix.block<p,q>(i, j) :<p, q>可理解为一个p行q列的子矩阵,该定义表示从原矩阵中第(i, j)开始,获取一个p行q列的子矩阵;















 2149
2149











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









