










一、项目概述
- 无人机实时音视频:实时回传无人机音视频,并且自动保存回传视频未MP4格式。
- 无人机轨迹地图:web端地图实时轨迹和图传。
- 无人机航线规划:web端地图设置航点、航点动作、航线,无人机按照路线进行飞行。
- 无人机控制:无人机一键起飞、一键降落、一键返航。
- 无人机飞行记录:对无人机飞行数据进行记录。
- 无人机大屏:四分屏、九分屏、十六分屏。
- 无人机AI火情检测:实时检测无人机视频流,进行视频流火情检测。
项目主要分为两个部分,app以及web端,可以通过web端进行统一管理,支持大疆机型。
二、项目介绍
apk下载地址:http://zjxf.kmdns.net:18801/dj-apk/download
管理地址:http://dji.hzcx.fun/project
用户名称:adminPC
用户密码:123456
使用技术:SpringBoot、SpringDataJpa、Freemaker、Redis、WebSocket等组成,基于B/S模式,使用Maven进行项目管理。
三、Web功能介绍
1、登录功能
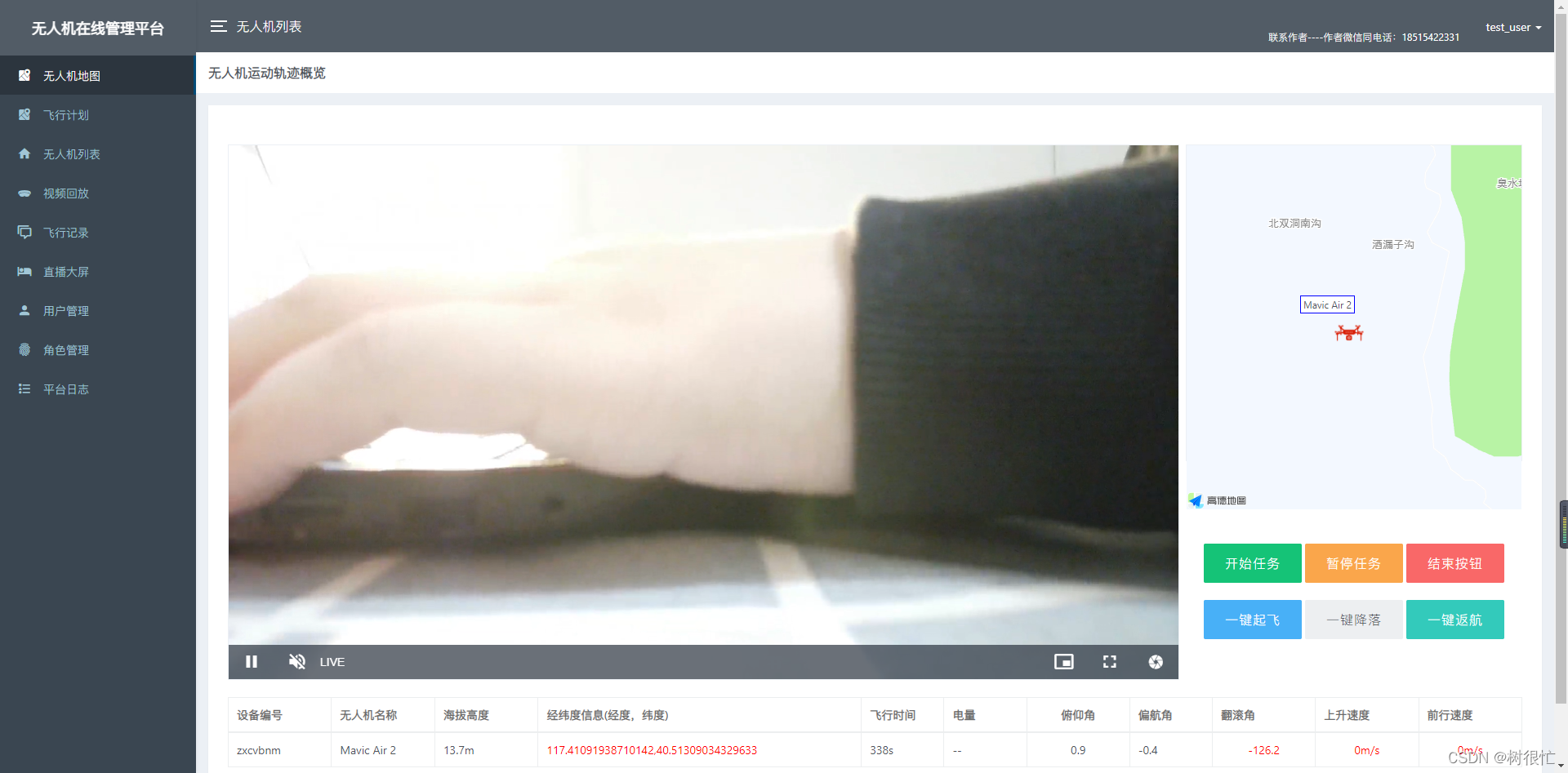
2、无人机地图
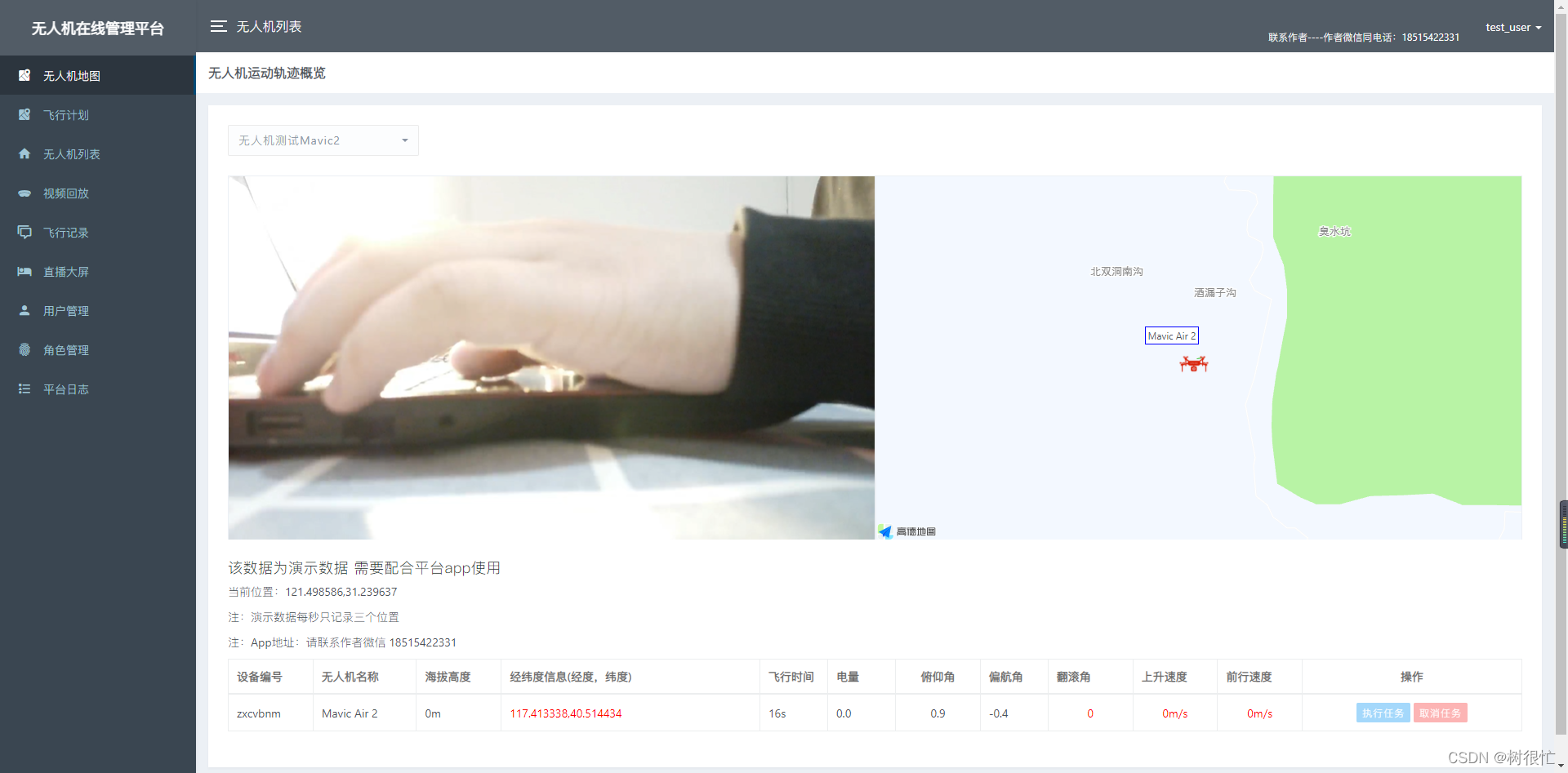
- 左侧为无人机实时视频画面,选择左上角选择框即可切换无人机视频直播源。
- 右侧为无人机实时轨迹,无人机经过会在地图绘制路线,直观显示无人机的飞行轨迹。
- 底部表格为无人机实时数据,只显示部分数据:经纬度、海拔、速度、状态等等。
3、飞行计划
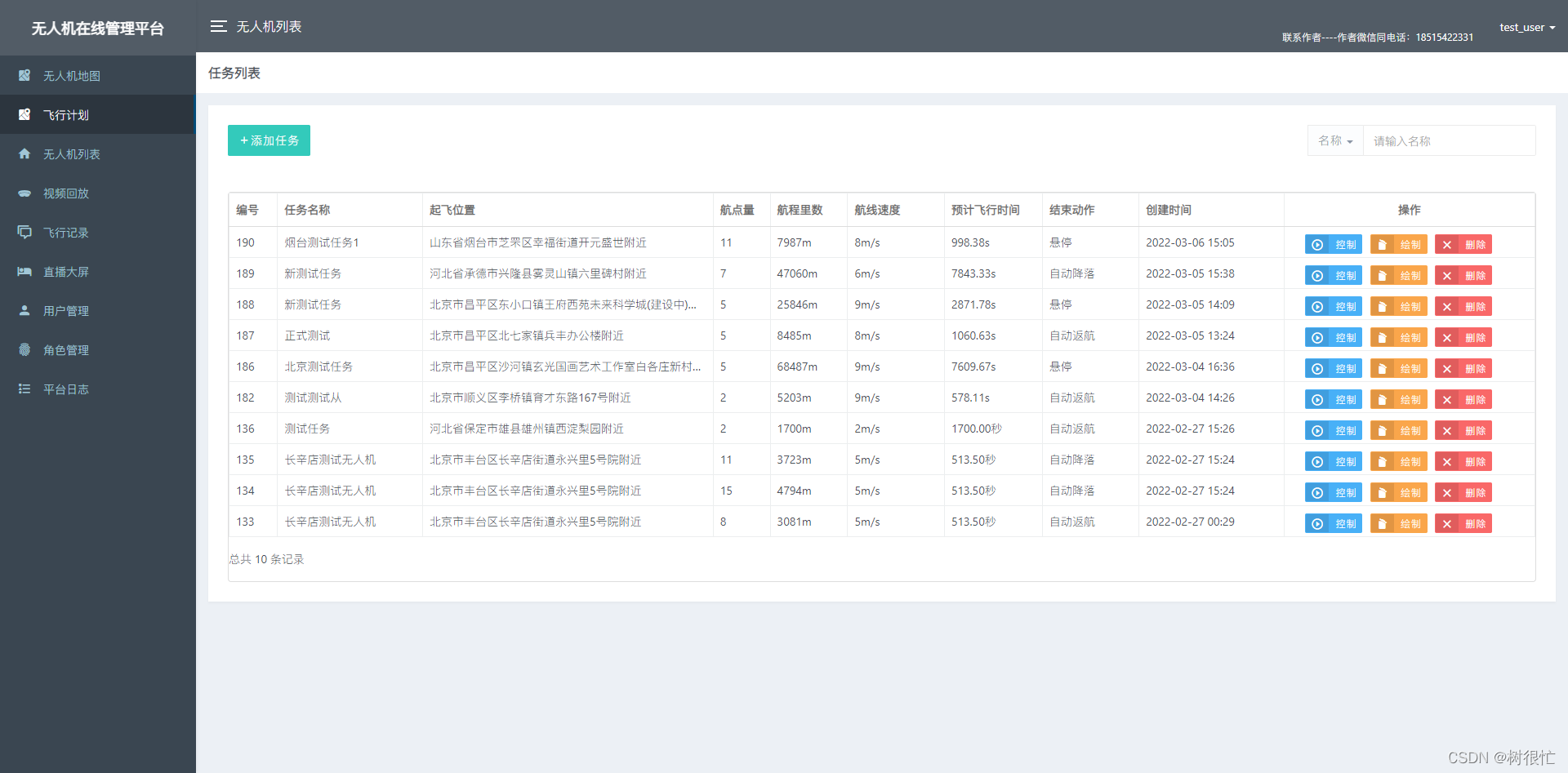
- 点击添加任务,即可开始设置航线,保存航线之后即可在飞行计划列表查看任务。
- 点击绘制即可进行任务的重新绘制。
- 点击删除即删除该飞行航线规划。
4、添加飞行计划
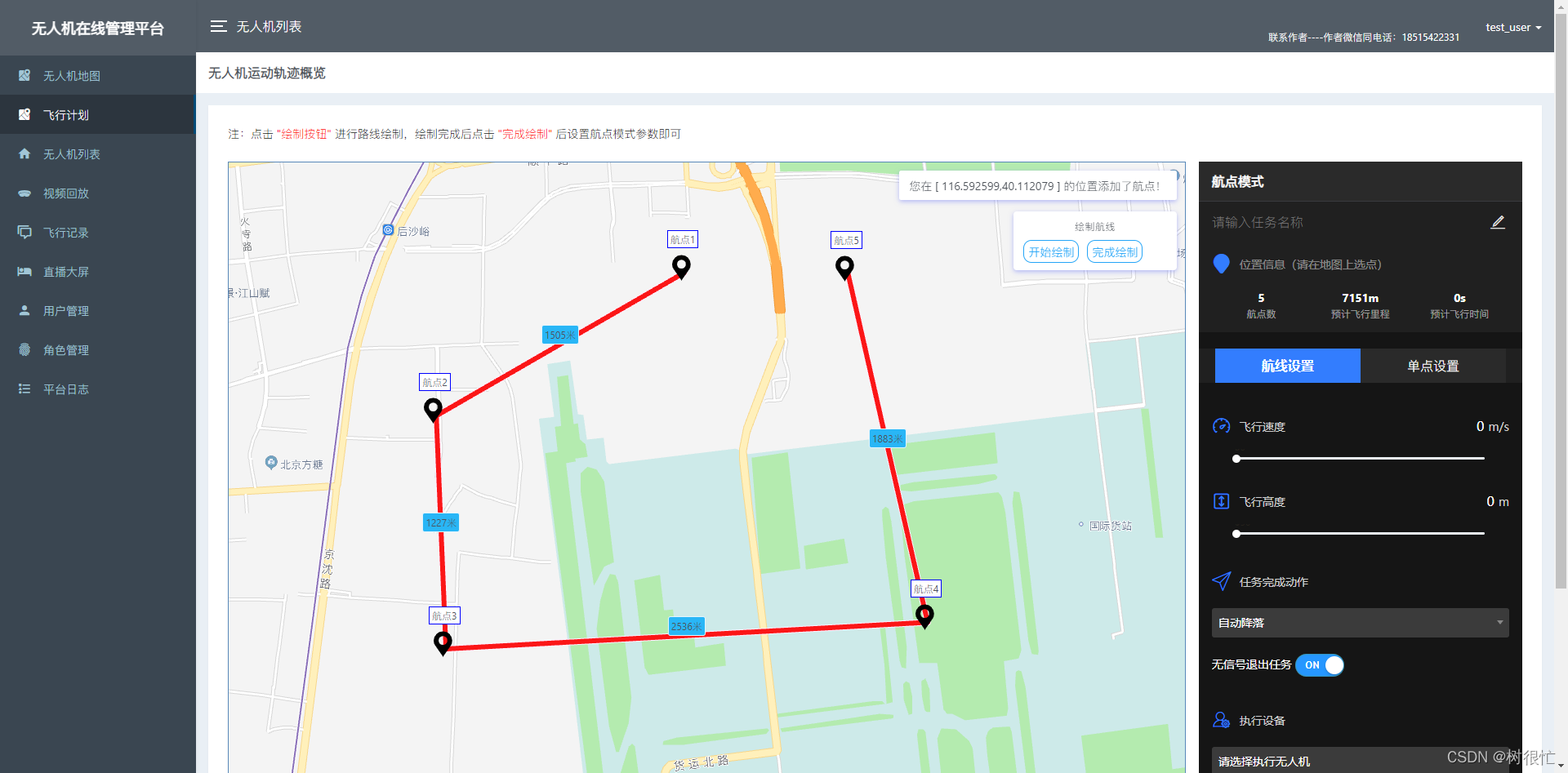
- 左侧地图可以通过鼠标左键进行航点选择,航点自动连线成飞行航线
- 右侧可以设置无人机的任务名称、飞行高度、飞行速度、指定无人机飞行
- 单点模式可以设置航线上每个航点的动作,动作包含:悬停、拍照、开始录像、关闭录像、调焦距、聚焦、旋转飞机角度、调整云台角度,并且可以设置动作时间以及旋转角度。
- 点击保存即可保存到飞行计划列表。
5、飞行计划-控制
- 左侧为无人机实时画面,右上角为无人机地图实时轨迹。
- 支持对无人机进行数据实时回传
- 支持在web端对无人机进行:一键起飞、一键返航、一键降落、开始任务、暂停任务、结束任务等操作。
6、无人机列表
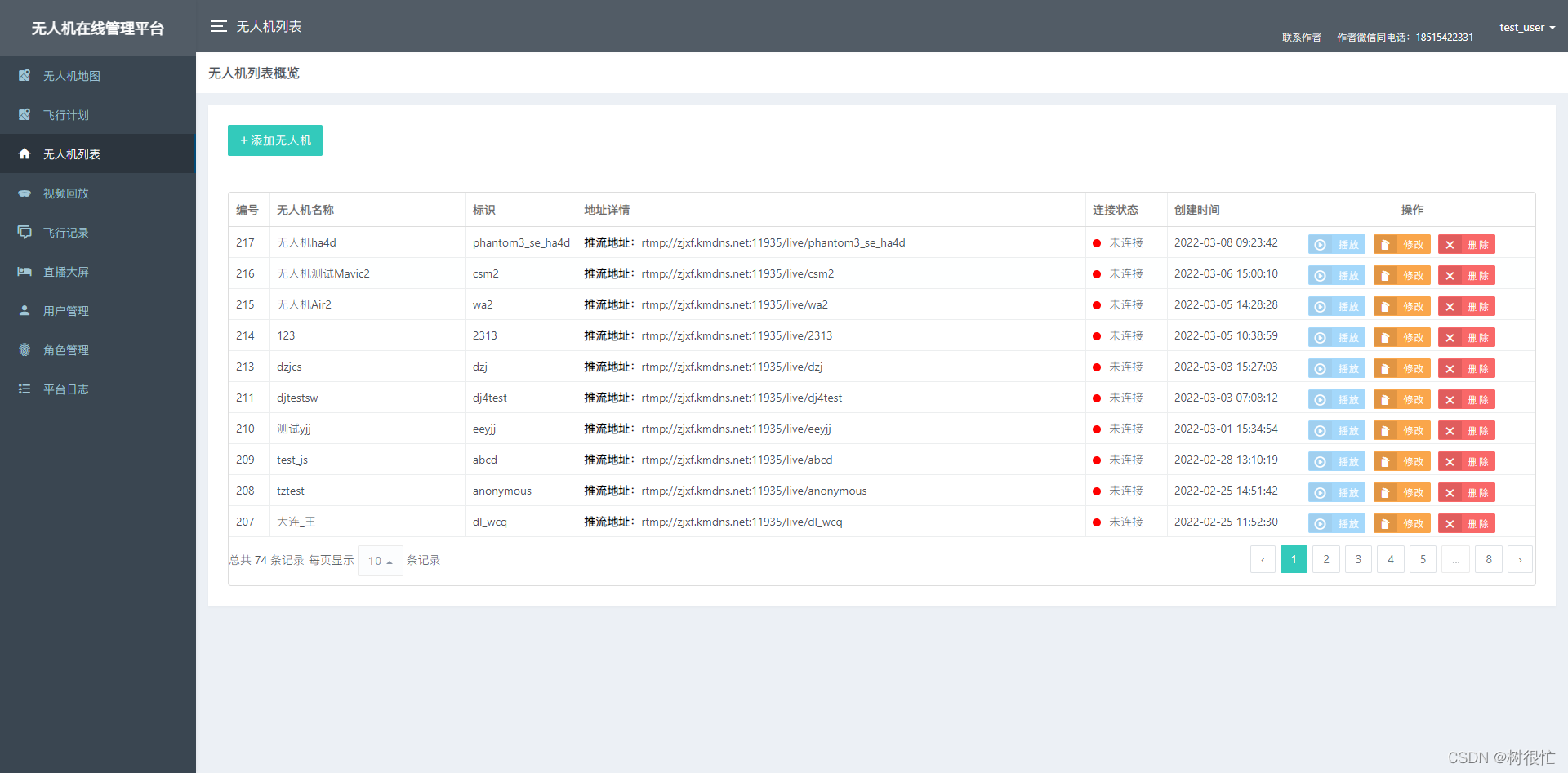
- 创建无人机自动生成推流地址,在 app设置地址即可点击播放按钮进行观看。
7、视频回放
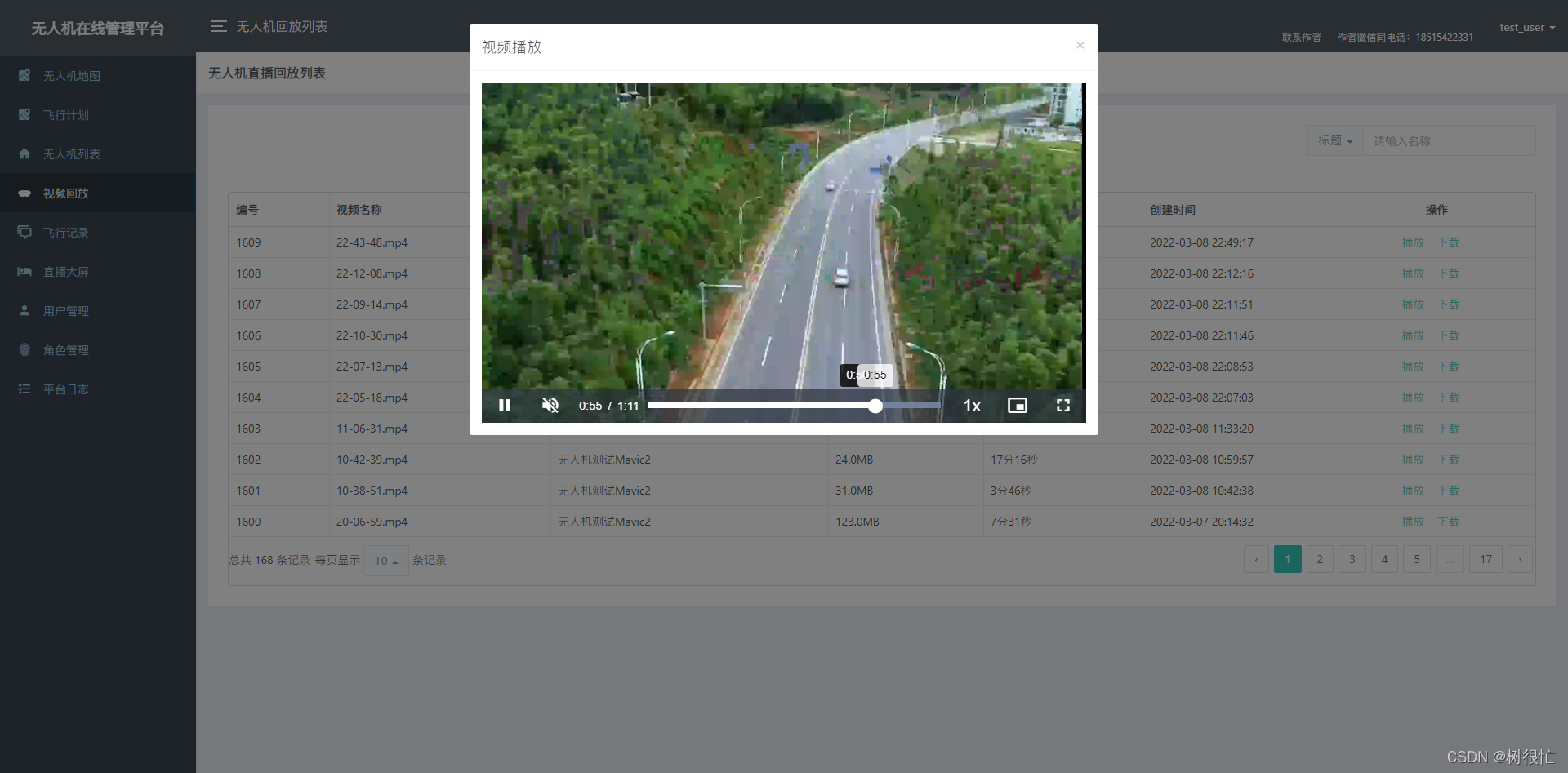
- 无人机视频回传结束后,即可自动保存视频到服务器,并且在视频回放页面生成数据,提供在线观看以及下载。
8、飞行记录
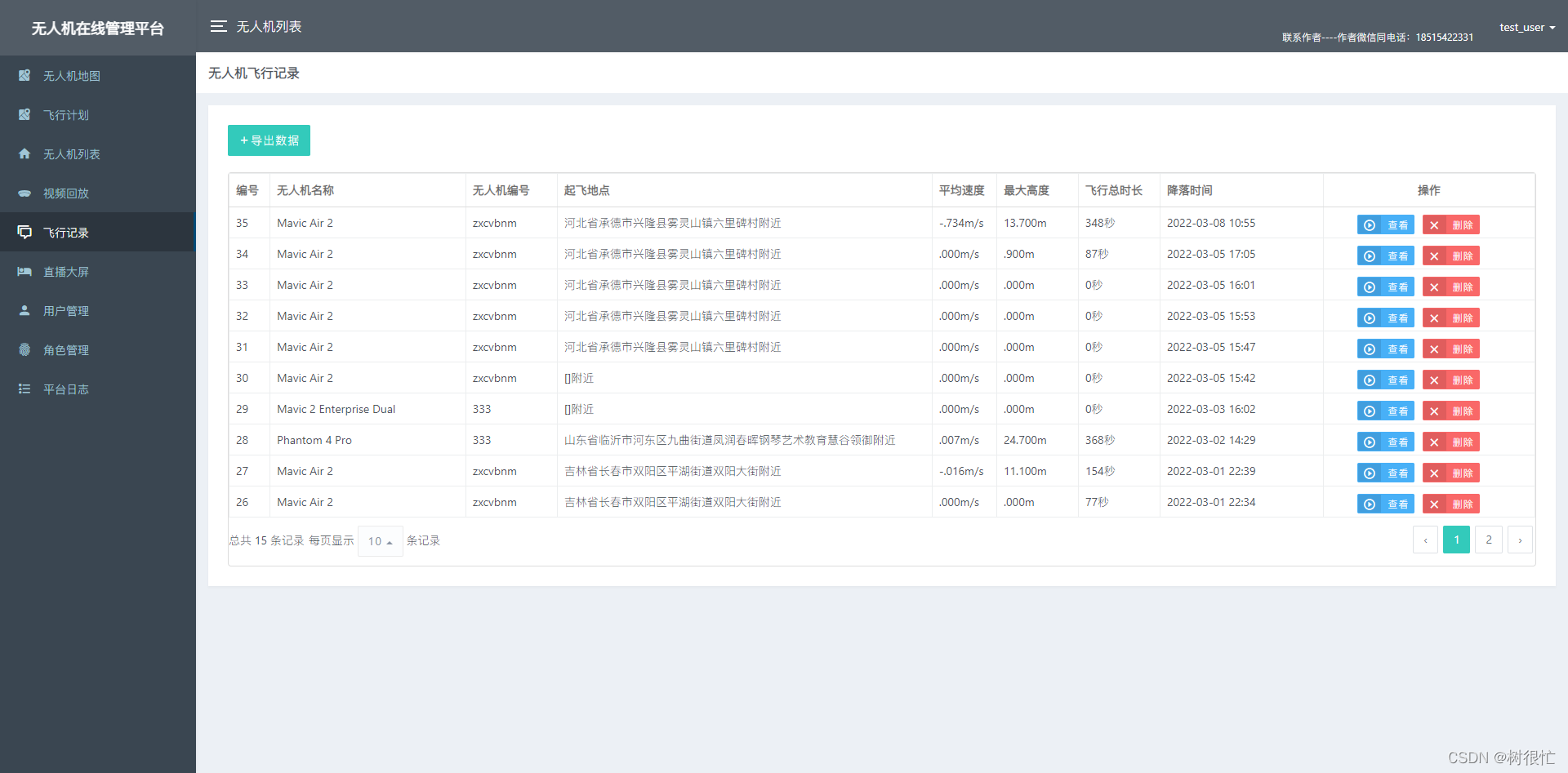
- 无人机飞行结束后,自动保存飞行过程中所产生的的数据到飞行记录列表
9、飞行记录详情
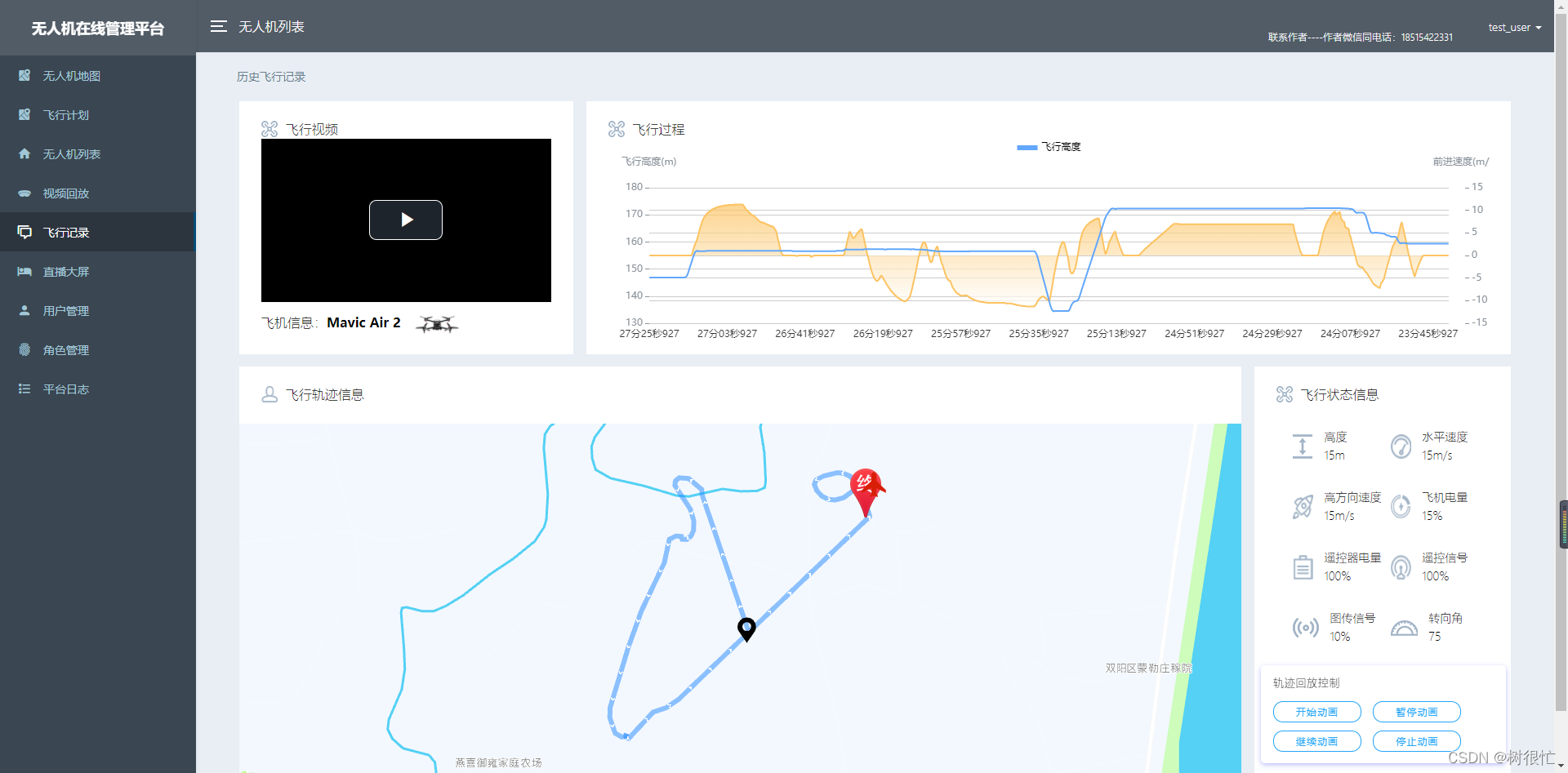
- 对无人机记录以轨迹回放的形式进行展示。
- 对无人飞行速度和飞行高度进行曲线统计。
10、直播大屏
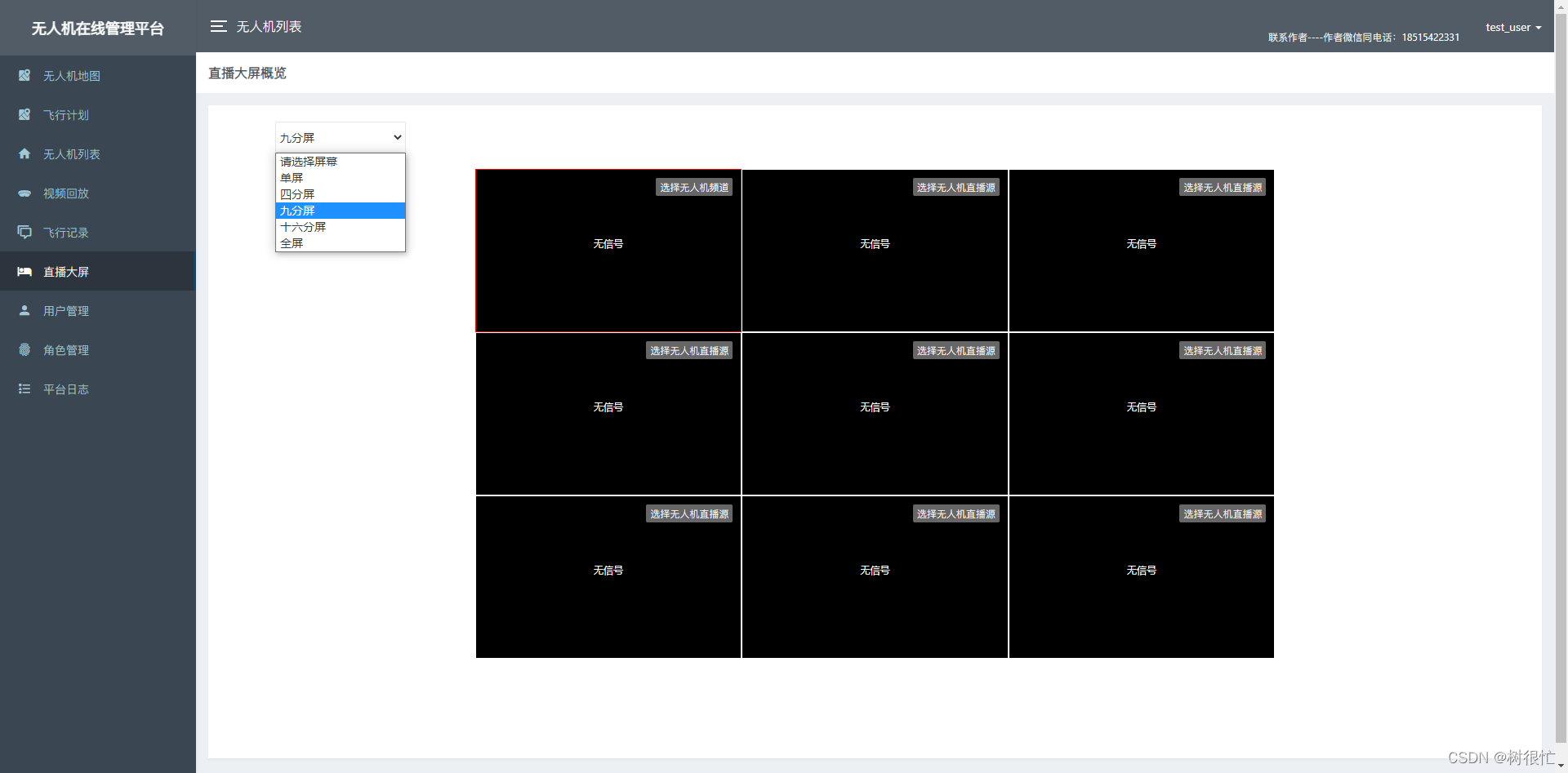
- 支持对已经连接无人机进行分屏播放,支持四分屏、九分屏、十六分屏以及全屏。
注:OA基础功能:用户管理、角色管理、平台日志等不一一展示
三、App功能介绍
1、首页模块

- 自动检测USB自动链接无人机设备,链接成功后,左上角会自动显示无人机名称。
- 链接成功后,底部会有toast提示。
2、设置页面
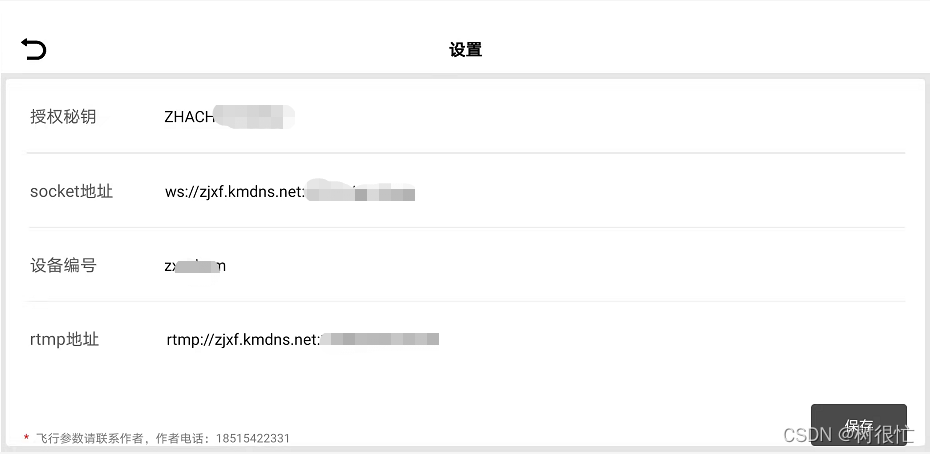
- 授权密钥可以联系作者。
- socket地址为数据接收地址,设置后,app将自动推送数据到指定地址。
- 设备编号可以自定义,目的是为了区分多个无人机。
- rtmp地址为推流地址。
3、飞控页面
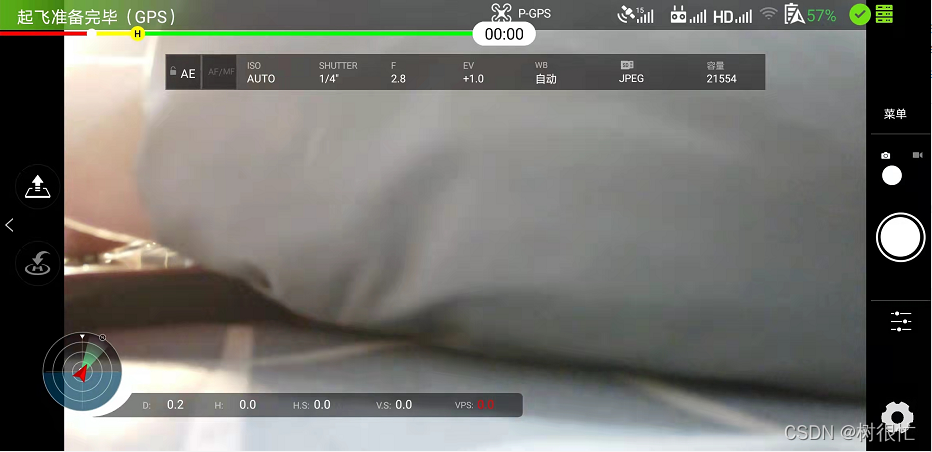


- 传输数据格式为json
{
"droneLocationLat": 114.467954,
"droneLocationLng": 38.06964,
"droneLocationArt": 68.33,
"velocityX": 0.3,
"velocityY": 0.4,
"velocityZ": 0.5,
"flightTimeInSeconds": 12303,
"value": 200
}- 字段说明
| 字段名称 | 字段类型 | 说明 |
| droneLocationLat | Double | 纬度 |
| droneLocationLng | Double | 经度 |
| droneLocationArt | Double | 海拔高度 |
| deviceId | String | 设备编号 |
| flyState | Int | 起飞状态 |
| velocityX | Float | x轴前进速度 |
| velocityY | Float | y轴前进速度 |
| velocityZ | Float | z轴前进速度 |
| flightTimeInSeconds | Int | 飞行时间 |
| batterValue | Int | 剩余电量 |
| deviceName | String | 飞行器名称 |
| pitchValue | Double | 翻滚角度 |
| rollValue | Double | 偏航角度 |
| yawValue | Double | 翻滚角度 |
- 后端接收数据显示

四、联系作者
作者电话以及微信:18515422331


















 1837
1837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











