









导读:本文主要介绍了DC-motor电流环和速度环的PI控制器参数的设计,并且简单介绍了设计控制器所需要的背景知识,相关仿真文件的下载地址在文章末尾可供大家下载。
DC-motor 的数学模型
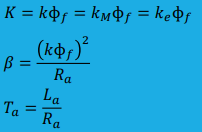
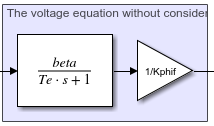
直流电机电枢绕组的电压方程为:
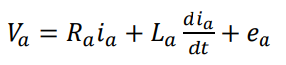
其中Ia 是绕组电流,La是绕组电感,Ra是绕组电阻, 是由电枢绕组在磁场中旋转产生的反电动势(back-EMF)
是由电枢绕组在磁场中旋转产生的反电动势(back-EMF)

其中 是back-EMF的常数(V/rad/Wb)
是back-EMF的常数(V/rad/Wb)
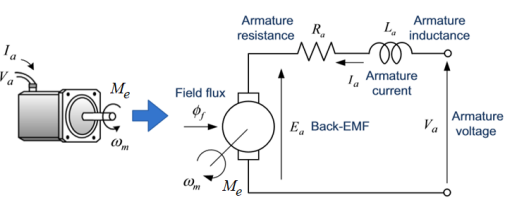
Figure 1. Equivalent circuit of a DC motor
Figure 2. Induced voltage for a moving conductor

其中 是力矩常数(Nm/Wb/A),
是力矩常数(Nm/Wb/A),  .
.
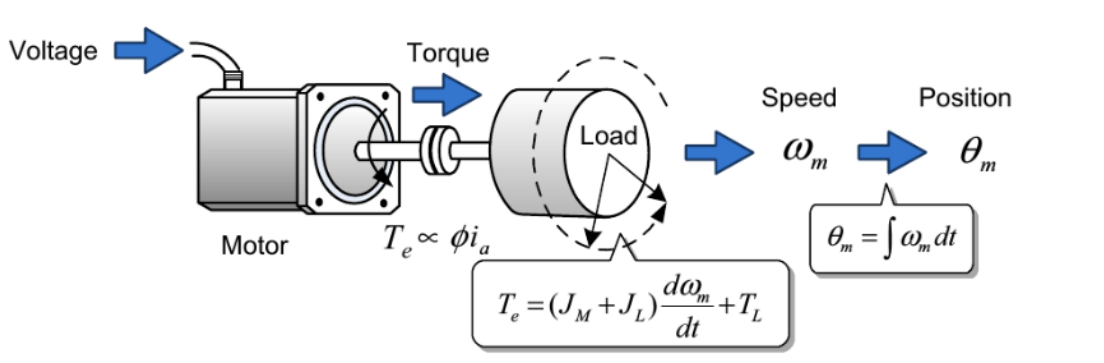
运动学方程

其中 是电机的角速度,
是电机的角速度, 是负载力矩,J是转动惯量。综上对于电机我们有如下方程组:
是负载力矩,J是转动惯量。综上对于电机我们有如下方程组:
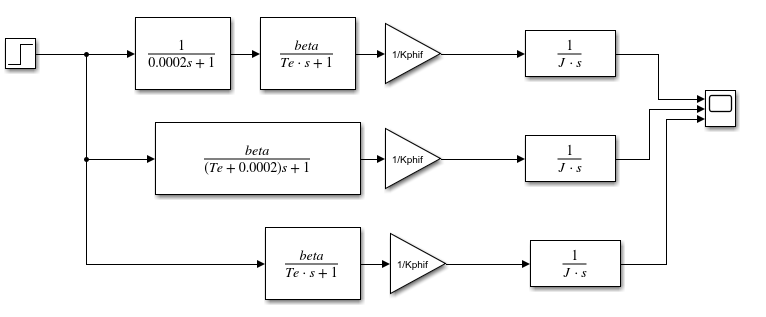
然后我们在simulink可以建立以下模型
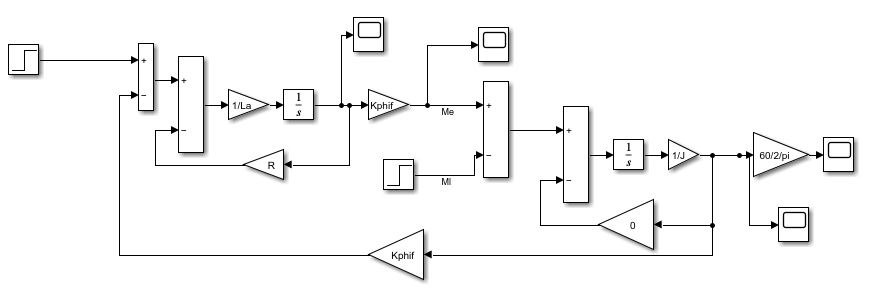
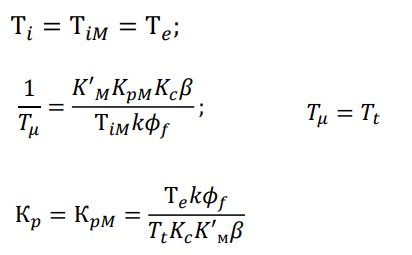
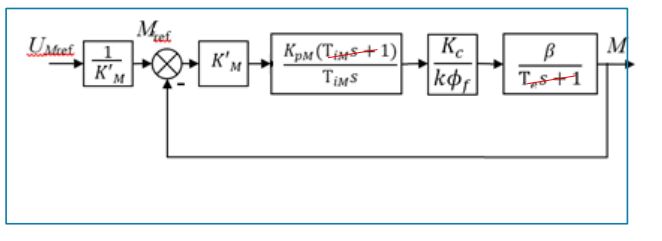
为了方便描述不妨它转化成广义电机模型
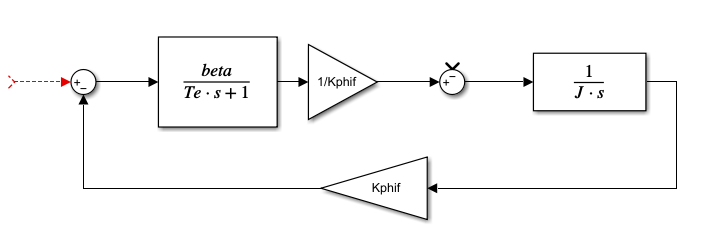
或者是这样的
它们的参数有如下对于关系
注意到电机是一个电压控制的设备,一般使用电力电子转换器(逆变器)实现DC到AC,在设计控制器的过程中我们把它看作一个惯性环节

PI控制器(controller)
PI控制器通常具有以下形式
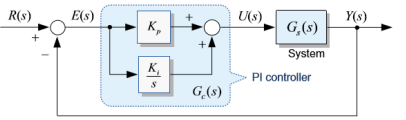
 是比例增益,起放大作用;
是比例增益,起放大作用; 是积分增益。
是积分增益。
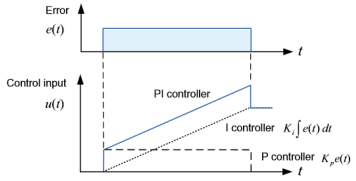
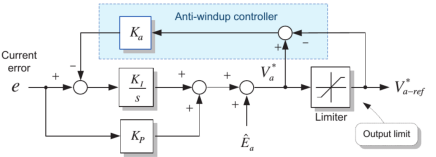
上图可以看到积分器对误差有累积作用,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零。然而,它却会产积分饱和现象,如下图
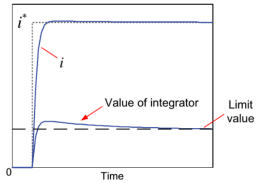
为什么会过饱和:我的个人理解是,在初始时刻误差很大,积分器积累了很多误差就像软磁体进入了饱和状态一样,当系统的输入越过参考信号后误差负的很小,积分器就像软磁体退出饱和区一样变化的很缓慢,从而导致系统的过冲维持一段时间后才恢复到参考信号上去。解决方法:使用抗饱和控制器如下图
一点点控制理论
什么是带宽
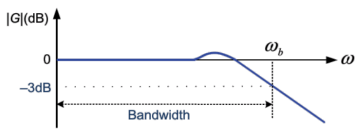
带宽是频率响应幅度 𝐺(jw) 大于 3 dB 的频率范围,即 0<𝜔<𝜔𝑏。带宽在电机控制器设计中是一个很重要的词。一个动态系统带宽越大,它相应也就越快。但是并不能一味追求更大的带宽,比如说,设计电流/力矩环的时候电流的响应不能快于逆变器开关的频率。对于各个环节中带宽的限制下文会详细说明。
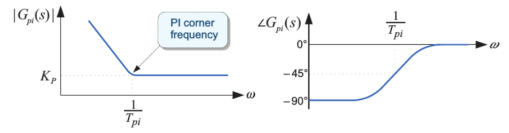
PI控制器的幅频特性和相频特性
讨论back-EMF对电流环的影响
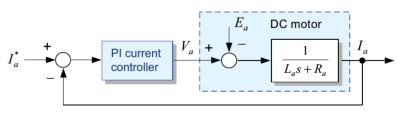
Figure 3. Block diagram of the DC motor including a current controller

𝐾𝑝𝑐 和 𝐾𝑖𝑐 PI controller的系数
电机的反电动势将干扰电流/转矩控制系统。 在闭环电流系统中,反电动势对电流/转矩控制的影响可以忽略不计:
对于大的系统惯性(因为速度变化引起的反电动势的变化非常小);
在低速应用中(如望远镜控制系统等)
否则(对于设计有小惯性以实现快速响应的伺服电机)我们需要采用前馈控制算法进行反电动势补偿
所以通常在不考虑反电动势的情况下调整电流/转矩环路
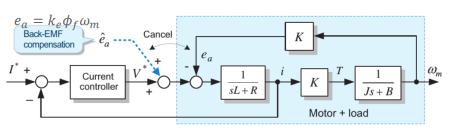
Figure 4. 带back-EMF补偿的电流环
传递函数的优化方法
在电力驱动的控制系统中,最常用的是遵循优化标准(参考传递函数):
1.最佳性能(The best performance BP)(或过阻尼过程)
根据最佳性能整定的开环控制系统的传递函数:
根据最佳性能整定的闭环控制系统的传递函数:
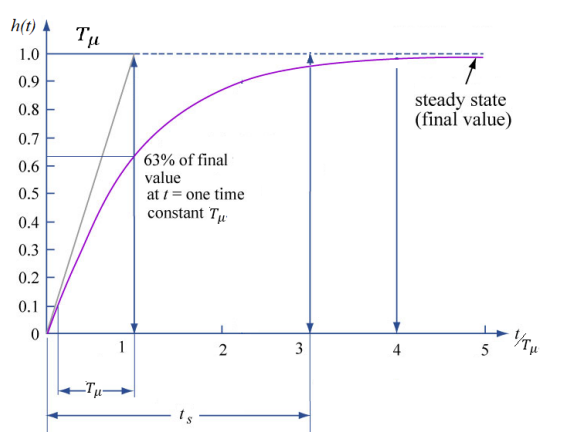
Figure 5 Transient in system with BP
2.幅度优化 (Magnitude optimization MO)
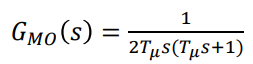
根据幅度优化调整的开环控制系统的传递函数:
根据幅度优化调整的闭环控制系统的传递函数:
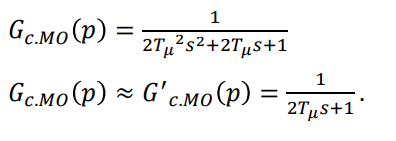

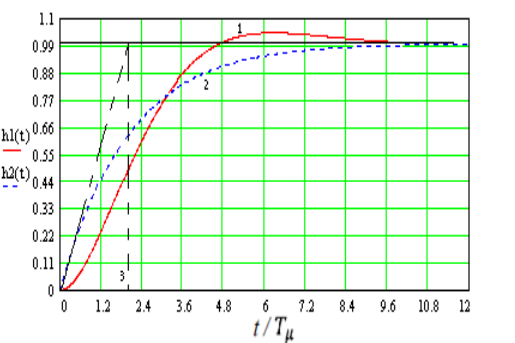
Figure 6 Transient in system with MO
计算电流环/转矩环PI控制器的参数
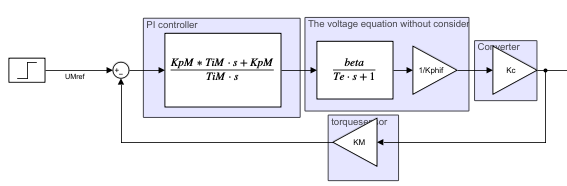
如上文已经提到,在设计电流环时可以先不用考虑back-EMF的影响,于是我们的电流环模型如下
由于电流环PI控制器需要通过逆变器来控制电机,因此先考虑逆变器传递函数对电流环的影响。假设开关频率是5000Hz,进行如下仿真
可以看到由于 远小于
远小于 ,可以忽略逆变器惯性环节的影响。因此电流环由PI控制器,逆变器增益,电机,力矩传感器构成
,可以忽略逆变器惯性环节的影响。因此电流环由PI控制器,逆变器增益,电机,力矩传感器构成
现在计算
逆变器增益 =10. 由于电机电流的变化速度不能快于电力电子转换器的开关频率,开关频率限制了电流控制的带宽。 设置时间常数(未补偿时间转矩环常数)
=10. 由于电机电流的变化速度不能快于电力电子转换器的开关频率,开关频率限制了电流控制的带宽。 设置时间常数(未补偿时间转矩环常数)
根据优化方法1,我们令

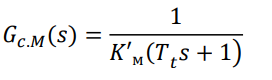
最后我们得到力矩环/电流环的闭环传递函数
计算速度内环PI控制器的参数
内部和外部速度控制回路根据 Magnitude Optimum 进行调整
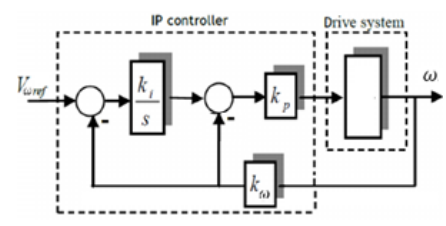
Figure 7 – Structure of I-P controller
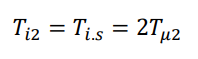
决定速度控制器动态性能的速度控制带宽受限于电流控制器的带宽和速度的采样频率(即速度控制的周期)。 如前所述,速度控制的带宽应比电流控制的带宽小五倍。 我们可以在采样频率的 1/10 或 1/20 的范围内选择速度控制带宽。作为例子不妨令 =0.0017s.根据优化方法2,令
=0.0017s.根据优化方法2,令
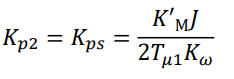
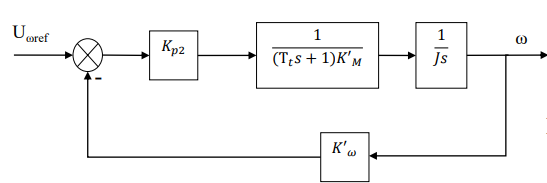
Figure 8 - block diagram of the internal speed control loop
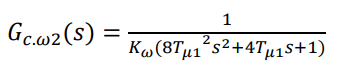
我们可以得到速度内环的闭环传递函数

计算速度外环PI控制器的参数
令
速度外环的闭环传递函数为
验证控制效果
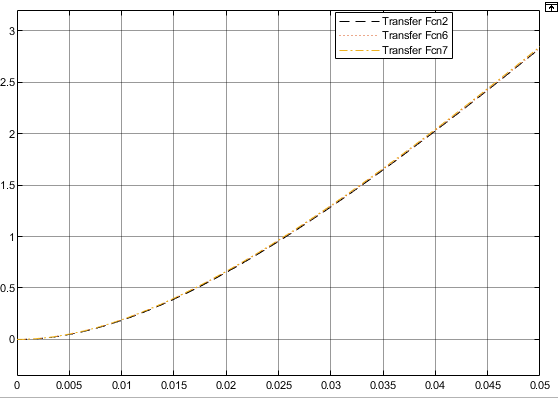
将广义DC电机模型替换为我们的DC motor模型并与MO模型对比,进行仿真:
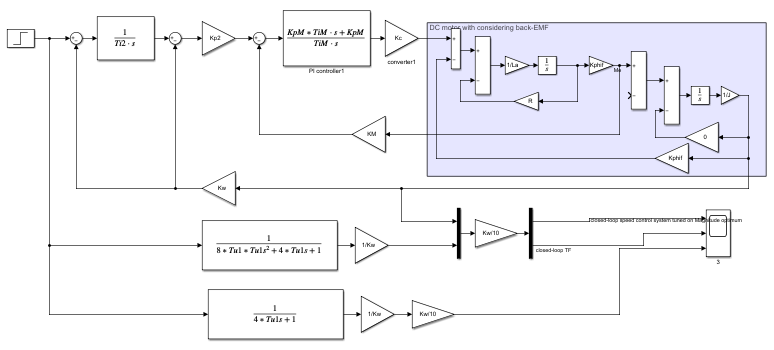
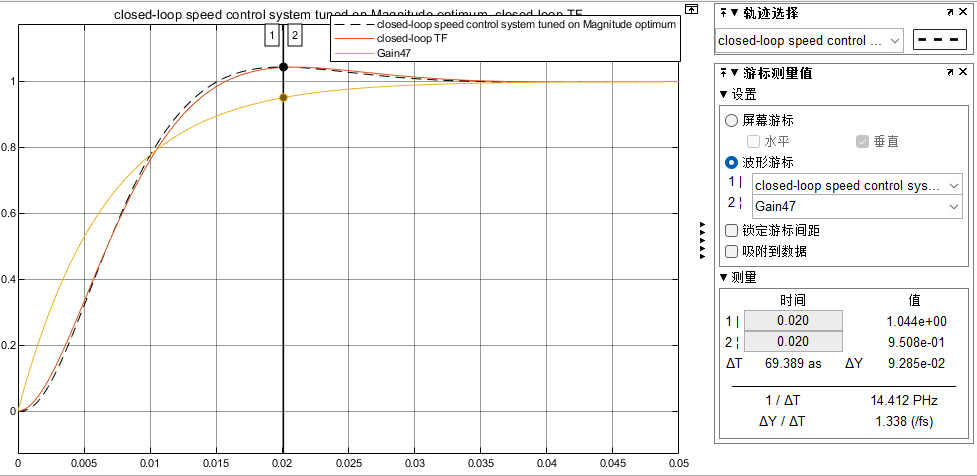
可以看到,当t=3*4*Tu1时,系统的速度已经进入了参考型号5%的区域。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











