







目录
细分原理
二相混合式步进电机电磁转矩方程
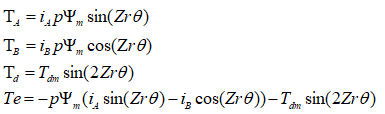
p-转子级数;Zr-转子齿数Zr=2*p;Ta-a相电磁转矩;Tb-b相电磁转矩;Td-定位矩(关于二相混合式步进电机的数学模型可参见我的另一篇博客二相混合式步进电机simulink仿真简单的驱动器建模(含模型文件)_Giiwedin的博客-CSDN博客_步进电机simulink模型)
对Te方程简单的理解
假设在t=0时刻ia=1,ib=0并且不计Td,那么![]()
这就是说在前面给定的电流条件下电机转子在不带负载的情况下应该转到theta=0的位置(即平衡位置),细分原理就是通过控制电流来控制转子的平衡位置。
细分控制的推导
令 ,
,![]()
可得 ,这里的α是就是转子新的平衡位置了,不过注意α是电角度要除以Zr齿数就是转子的机械角度。
,这里的α是就是转子新的平衡位置了,不过注意α是电角度要除以Zr齿数就是转子的机械角度。
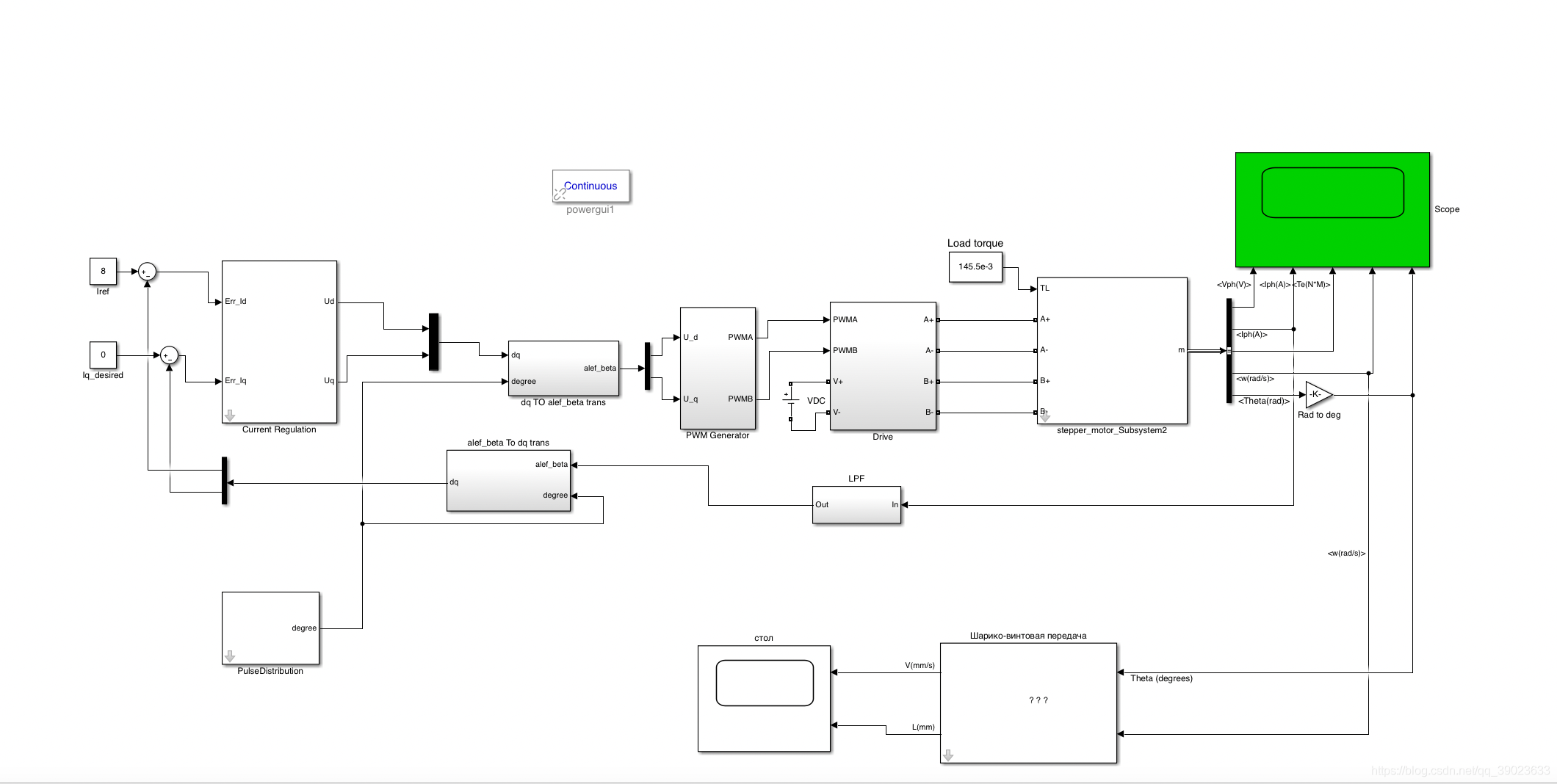
细分系统总体图
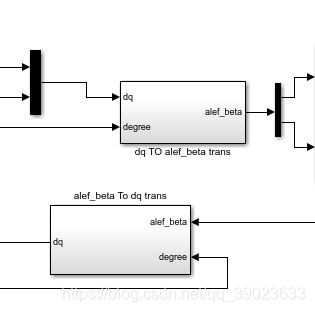
正弦电流的仿真simulink实现
Park变换:

Park反变换:
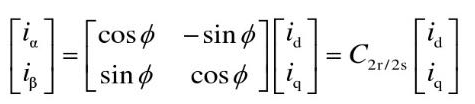
注意到要使只需要在Park反变换时令iq=0即可。
关于PWM电流控制(或SVPWM控制)
使用滞环电流pwm控制,因此需要在电流反馈回路加入低通滤波
也可以使用SVPWM控制,在我的另一篇文章中有提(二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)_Giiwedin的博客-CSDN博客_步进电机数学模型)
关于模型中如何控制细分数
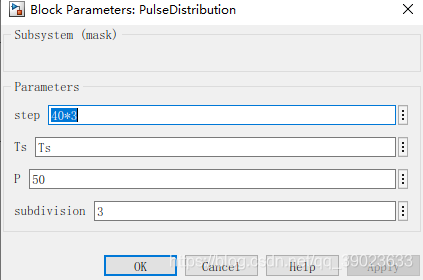
双击PulseDistribution
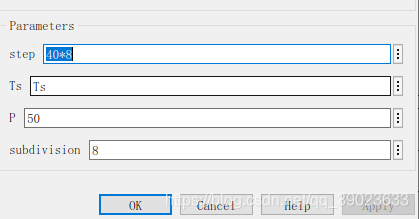
step项意思是:多少个脉冲每秒
subdivision相的意思是:细分数
当3细分,每秒40*3个脉冲时:
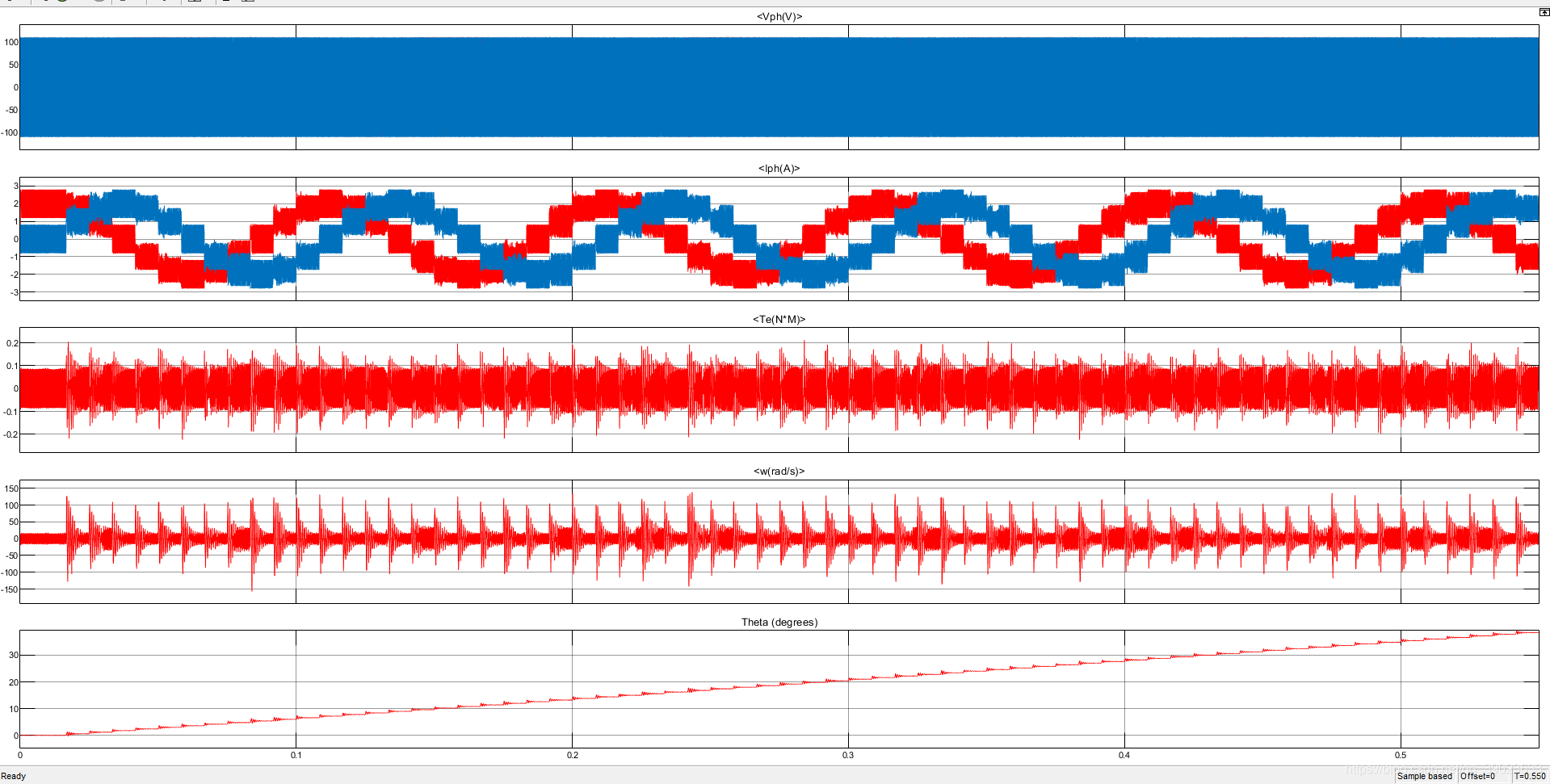
注意!!!! 输出的总步数可能会少两步,解释如下
如果设置stop time为0.5s
不设置细分且每秒10步

此时电机应该走的步数=step*stop_time*1=(10step/s)*0.5s*1(subdivision)=5step,然而scope显示:

可以看到只有三步,少了两步;这是因为电机在延迟了两步的时间之后才开始运动;如果需要看到完整的五步自然需要将stop时间设置的更大一些比如设置0.75,得到图像:
相关文献

结尾
以上就是二项混合步进电机开环细分控制仿真全部内容
可以自己调一下参数获得较好的效果
下载地址:hb步进电机细分控制仿真matlab2016b版,更正错误-Matlab其他资源-CSDN下载
版本:2016b
参考文献:步进电机细分驱动技术 simulink 仿真 许永衡 陈志锦 张天佑
其他关于步进电机控制仿真的文章:
二相混合式步进电机开环细分控制simulink建模仿真含模型文件二相混合式步进电机开环细分控制simulink建模仿真含模型文件_Giiwedin的博客-CSDN博客
二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)_Giiwedin的博客-CSDN博客_步进电机数学模型
二相混合式步进电机simulink仿真简单的驱动器建模(含模型文件)二相混合式步进电机simulink仿真简单的驱动器建模(含模型文件)_Giiwedin的博客-CSDN博客_步进电机simulink模型
相关文章:
使用simulink仿真连续(离散)线性定长系统全维渐进状态观测器_Giiwedin的博客-CSDN博客
使用drem对控制系统进行参数估计simulink仿真_Giiwedin的博客-CSDN博客
对给定干扰信号的simulink数字控制系统仿真_Giiwedin的博客-CSDN博客_simulink扰动信号
二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)_Giiwedin的博客-CSDN博客_步进电机数学模型
二相混合式步进电机开环细分控制simulink建模仿真含模型文件_Giiwedin的博客-CSDN博客















 6344
6344











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











