









压电堆栈的数学模型
假设条件
让我们考虑一个横截面为 S0 的薄膜致动器,其一端固定在固定基座上,其初始尺寸 l0 在电场 E 的作用下沿场作用方向改变值 l,移动质量为 m0 的控制对象,其自由端铰接。除了控制对象外,压电元件的有源部分的体积元也会运动,其质量mk往往小于执行体的质量。在这种情况下,在计算总减少的移动质量 mΣ 时,将考虑执行器的移动基本体积的惯性,这将等于质量 m0 和压电陶瓷的部分质量 mk 的总和,因为压电元件固定在一端,这部分不参与运动。内部电极和焊料对致动器弹性性能的影响可以忽略不计,因为它们的层厚度比陶瓷层薄 20-30 倍,并且可能的电极间间隙通过致动器的初始压缩来选择在其制造的技术过程中。也就是说,从弹性特性的角度来看,致动器被认为是一个整体块。我们将假设没有明显的位移,除了沿厚度的位移,这是因为陶瓷沿厚度极化并且外场沿初步极化方向施加。整个体积的变形将被认为是均匀的,通常,整个执行器将被视为具有一个自由度的电弹性系统。在这种情况下,压电效应和压电介质方程中参数的下标可以省略。此外,为了保持器件模型的线性表示,我们将假设控制场强明显小于预极化场(当这些场的强度相当时,会出现显着的非线性失真,这是无法做到的)忽略),并且工作频率范围远离第一机电共振(范围上限与共振频率相差至少一个数量级)。
模型推导
对于单个压电元件
压电材料本构方程:
对于压电执行机构我们更关心逆压电效应,因此
考虑到 其中Y - 杨氏模量,改写上述方程如下:
等式左边表达了因压电体伸缩产生的力:
等式右边第一项表达了因对压电体施加电场产生的力:
对于压电堆栈
其中N - 压电堆栈中压电原件的个数
注意到模型需要反应在压电堆栈的动态响应过程,因此力平衡中应当加入(与加速度成正比),此外还应有内部阻尼
.因此确定了所有作用力后,平衡方程如下:
其中 ,
- 内部阻尼系数.
电介质中的位移电流的表达式:
其中,
正压电系数
.
假设放大器有内阻
整理上述方程进行拉普拉斯变换:
其中.
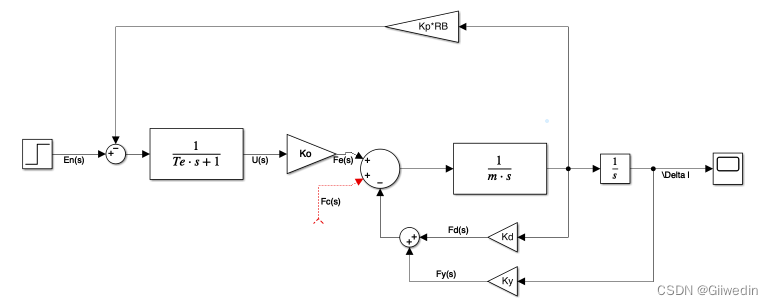
方框图如下:
选择压电陶瓷类型
现在根据上述数学模型仿真,假设压电执行器的最大设计伸长250微米,先从选材开始:
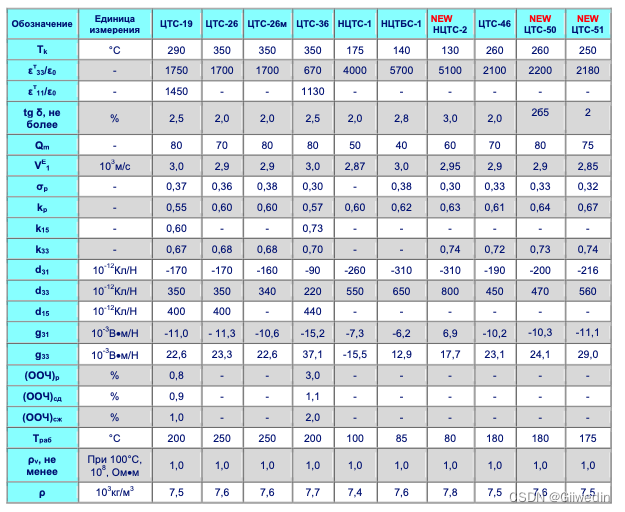
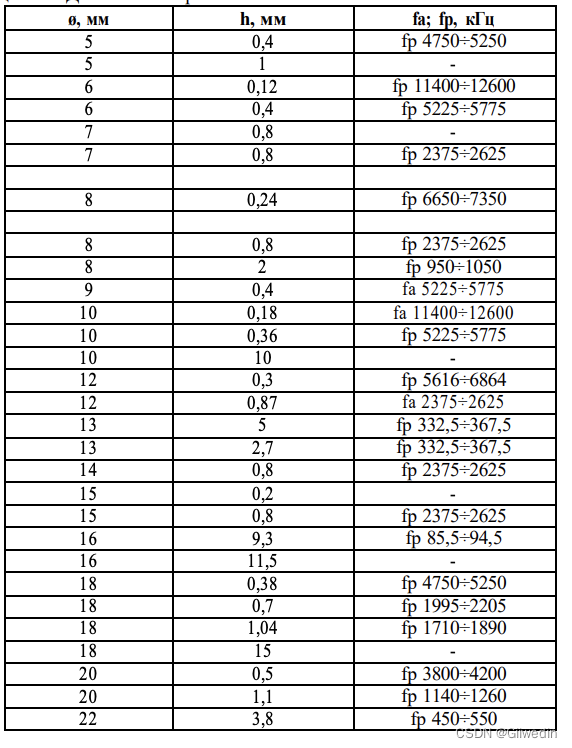
选择压电材料 ЦТС- 36 ,压电元件几何参数:圆盘、半径18mm、厚度0.7mm,放大器内阻100欧姆,不考虑放大系数,不考虑电机的杨氏模量。
计算参数
使用已经编写好的.m程序
%----------------------示例 最大伸长250微米----------------------
%--------选材 цтс-36
%---------------piezo 材料
epsilon33=670;
epsilon0=8.85e-12;
d33=220e-12;
Qm=80;
k33=0.7;
Y33=(k33^2*epsilon33*epsilon0)/(d33^2);%不考虑电极材料
%---------------压电元件形状(圆盘)
D=18e-3;
l3=0.7e-3;
S0=pi*(D/2)^2;
mk=S0*l3*N;
%---------------放大器内阻(不考虑放大器放大倍数)
RB=100;
%---------------最大电压
Umax=600;
%---------------压电元件个数
N=ceil(250e-6/(d33*Umax));仿真结果
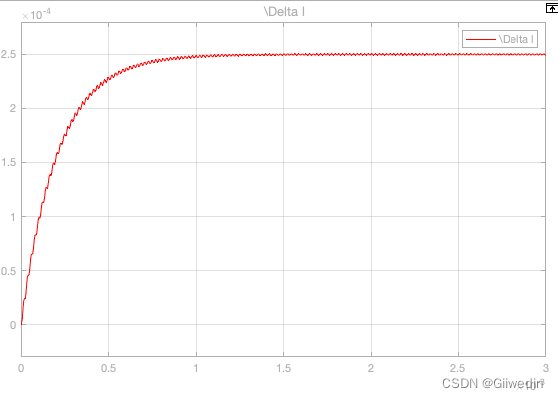
传递函数
各种硬件都可以将直接压电效应 (KP) 和换能器惯性 (Te) 的影响降至最低。例如,可以通过使用大功率晶体管减少直接压电效应的影响。此外,内部阻尼的影响一般很小。他们也可以被忽略。在这种情况下,我们获得了执行器的显着简化的传递函数
得到的执行器模型可以被认为是最粗略的第一近似值。 当然,由于陶瓷的内部损耗,振荡会受到抑制,并且可以将其考虑在内,知道品质因数Qm,有以下
对于多层薄膜压电执行器(尤其是位移范围大,大于 20 μm),由于N值较大,并不总是可以忽略静电常数,那么可以有以下形式传递函数:
仿真文件下载地址:
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











