







 本文介绍了Blender中虚拟相机的主要参数,包括分辨率、相机类型、视野和传感器大小等,并探讨了相机的内外参矩阵计算。外参矩阵可直接从Blender获取,而内参矩阵则需要通过设定参数来计算,其中焦距、传感器尺寸和主点坐标是关键要素。内参矩阵用于将3D坐标转换为2D像素坐标。
本文介绍了Blender中虚拟相机的主要参数,包括分辨率、相机类型、视野和传感器大小等,并探讨了相机的内外参矩阵计算。外参矩阵可直接从Blender获取,而内参矩阵则需要通过设定参数来计算,其中焦距、传感器尺寸和主点坐标是关键要素。内参矩阵用于将3D坐标转换为2D像素坐标。
Blender相机参数与矩阵计算
Created: May 12, 2022 9:40 AM
Reviewed: No
1. Blender相机参数
Blender中的虚拟相机常用的参数有:
-
Resolution X & Y - 相机分辨率

-
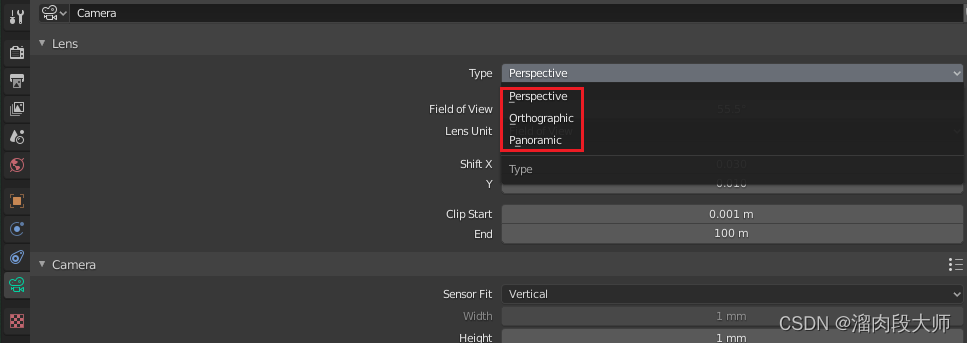
Type - 相机类型(透视、正交、全景)
-
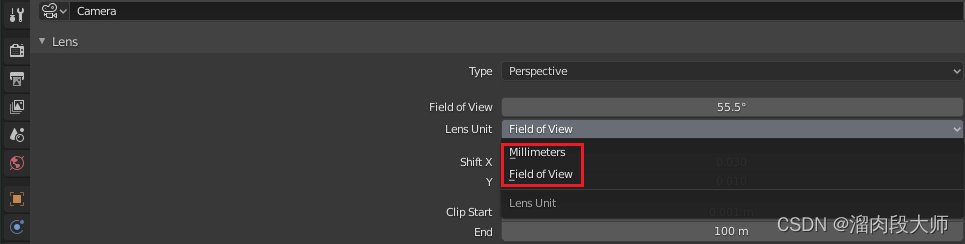
Field of view - 视野 / Focal length - 焦距
-
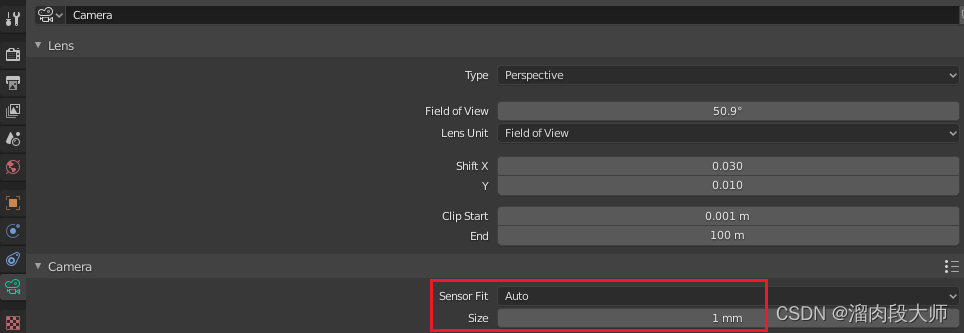
Sensor size - 传感器大小
除了相机的特有属性之外,还有相机作为空间物体的基本属性,包括空间位置以及旋转等。
2. 相机矩阵计算
2.1 外参矩阵
Blender支持直接输出相机外参矩阵,方法见下图。

2.2 内参矩阵
暂时不支持直接输出,可以通过计算获得。
先看一下内参矩阵的意义,
内参矩阵 K K K 是为了将相机坐标系下的3D坐标转为渲染图中像素的2D坐标,
m = K M c m = KM_c m=KMc
其中 M c M_c Mc 为3D空间中某一个点的坐标。
K K K 矩阵包含了上文中提到的各种相机参数,具体的表示为:
K = [ α u s u 0 0 α v v 0 0 0 1 ] = [ f p w s u 0 0 f p h v 0 0 0 1 ] K= \begin{bmatrix}\alpha_{u} & s & u_0 \\ 0 & \alpha_{v} & v_0 \\ 0 & 0 & 1\end{bmatrix} = \begin{bmatrix}\frac{f}{p_w} & s & u_0 \\ 0 & \frac{f}{p_h} & v_0 \\ 0 & 0 & 1\end{bmatrix} K=⎣⎡αu00sαv0u0v01⎦⎤=⎣⎢⎡pwf00sphf0u0v01⎦⎥⎤
其中, f f f 为焦距长度(mm), p w p_w pw 和 p h p_h ph 为长度和宽度方向上相机传感器的大小, u 0 u_0 u0 和 v 0 v0 v0 为主点坐标。
如何计算?
上面的公式中, f , p w , p h f,p_w,p_h f,pw,ph可以直接通过设置得到, u 0 , v 0 u_0,v_0 u0,v0设置为照片分辨率的一半即可。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









