






霍夫变换
基本定义:
霍夫变换是图像处理中的一种特征提取技术,该过程在一个空间中通过计算累计结果的局部最大值得到一个符合该特定形状的集合作为霍变换的结果。霍夫变换运用两个坐标空间之间的变换将在一个空间中具有相同形状的曲线或直线映射到另一个坐标空间的一个点上形成峰值,从而把检测任意形状的问题转化为统计峰值问题。
霍夫线变换原理:

那么通过这条直线的点(也就是直线上的点)必满足r=x0*cos theta +y0*sin theta
对于给定的x0,y0,所有通过该点的直线,是一条正弦曲线

不同的点,有不同的正弦图像,而他们的焦点就代表这他们在同一条直线时r和theta的值

霍夫线变换所做的工作就是最终图像中每个点对应曲线间的交点,一旦交点数量超过了一个阈值,那么就可以认为这个交点中参数所代表的直线,在图像中是一条直线
霍夫线变换的的直接输入必须,也只能是二值图像
标准霍夫变换(HoughLines()函数)
void HoughLines(InputArray src,OutputArray lines,double rho,double theta,int threshold,double srn = 0,double stn = 0)
一参为输入图像,二参为直线,每一条线表示为有两个元素的矢量r,theta,三参四参距离精度和尺寸精度,五参可以理解为原理中的交点数阈值,六参七参与多尺度霍夫变换有关,下面再提
测试程序:
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgcodecs/imgcodecs.hpp>
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
Mat src = imread("E://1.jpg");
Mat temp, dst;
Canny(src, temp, 50, 200, 3);
cvtColor(temp, dst, COLOR_GRAY2BGR);
vector<Vec2f> lines;
HoughLines(temp, lines, 1, CV_PI / 180, 150, 0, 0);
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
line(dst, pt1, pt2, Scalar(55, 100, 195), 1, LINE_AA);
}
imshow("【原始图】", src);
imshow("【边缘检测后的图】", temp);
imshow("【效果图】", dst);
waitKey(0);
}测试结果:

累计概率霍夫变换(HouphLinesP):
多个P,多个概率,多了个最低线段长度和允许同一行点与点之间连接起来的最大距离,累计概率霍夫变换得到的直线,长度应该阈值区域内
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgcodecs/imgcodecs.hpp>
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
Mat src = imread("E://1.jpg");
Mat temp, dst;
Canny(src, temp, 50, 200, 3);
cvtColor(temp, dst, COLOR_GRAY2BGR);
vector<Vec4i> lines;
HoughLinesP(temp, lines, 1, CV_PI / 180,80,50,10);
for (size_t i = 0; i < lines.size(); i++)
{
Vec4i l = lines[i];
//此句代码的OpenCV2版为:
//line( dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(186,88,255), 1, CV_AA);
//此句代码的OpenCV3版为:
line(dst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(186, 88, 255), 1, LINE_AA);
}
imshow("【原始图】", src);
imshow("【边缘检测后的图】", temp);
imshow("【效果图】", dst);
waitKey(0);
}测试结果:

霍夫圆变换:
原理与线变换一致,不过表达直线和圆的函数截然不同,直线是r,theta,圆是x,y,r(圆心坐标和半径)
原先是二维空间找超过阈值的交点次数,现在是三维空间找超过阈值的交点次数
在OpenCV中,常用“霍夫梯度法”来解决圆变换的问题
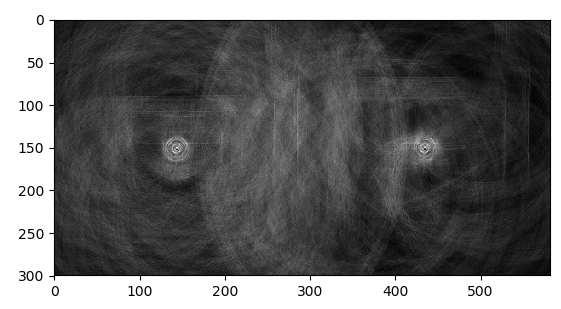
霍夫梯度变换:
1.读取原始图并转换成灰度图,采用边缘检测算子(如Canny)转换成二值化边缘图像;
2.给定半径R,对于每个图像中的边缘点(a, b),按照参数方程 x = a + Rcos(θ) 和 y = b + Rsin(θ) 将那些可能是一个圆中心的单元格值进行累加;
3.找到大于阈值的累加器,和对应的 a, b 参数;
4.若半径未知,改变R的值,重复步骤2~3,直到遍历完半径范围。
(所谓阈值,本质上不过还是函数图像相交次数,也就是相交次数最大的圆)


霍夫梯度法的缺点:
1.阈值设置太小,那圆可太多了
2.因为中心是按照其关联的累加器值的升序排列的,并且如果新的中心过于接近之前已经接受的中心的话,就不会被保留下来
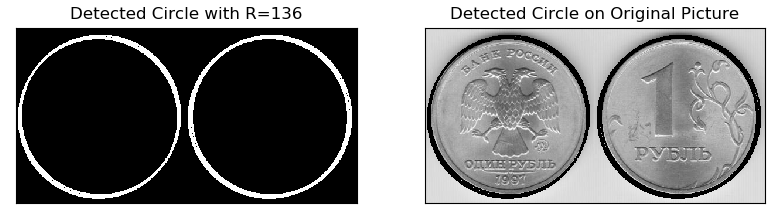
霍夫圆变换(HoughCircles()):
void HoughCirCles(InputArray src,OutputArray circles,int method,double dp,double minDist,double param1 = 100,double param2 = 100,int minRadius = 0,int maxRadius = 0)
第一个参数image是输入图像矩阵,要求是灰度图像;
第二个参数 circles是一个包含检测到的圆的信息的向量,向量内第一个元素是圆的横坐标,第二个是纵坐标,第三个是半径大小;
第三个参数 methodmethod是所使用的圆检测算法,目前只有CV_HOUGH_GRADIENT一个可选;
第四个参数 dp是累加面与原始图像相比的分辨率的反比参数,dp=2时累计面分辨率是元素图像的一半,宽高都缩减为原来的一半,dp=1时,两者相同。(关于这个分辨率的概念没有理解透,按道理低分辨率应该意味着更快的检测速度,然而实测恰恰相反)
第五个参数 minDist定义了两个圆心之间的最小距离;
第六个参数param1是Canny边缘检测的高阈值,低阈值被自动置为高阈值的一半;
第七个参数param2是累加平面对是否是圆的判定阈值;
第八和第九个参数定义了检测到的圆的半径的最大值和最小值;
测试程序:
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
int main() {
Mat src = imread("E://1.jpg");
Mat temp, dst;
imshow("原图", src);
cvtColor(src, temp, COLOR_BGR2GRAY);
GaussianBlur(temp, temp, Size(9, 9), 2, 2);
vector<Vec3f> circles;
HoughCircles(temp, circles, HOUGH_GRADIENT, 1.5, 10, 200, 100, 0, 0);
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
circle(src, center, 3, Scalar(0, 255, 0), -1, 8, 0);
circle(src, center, radius, Scalar(155, 50, 255), 3, 8, 0);
}
imshow("【效果图】", src);
waitKey(0);
return 0;
}测试结果:

综合霍夫变换测试程序:
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
Mat src,temp, dst;
vector<Vec4i> lines;
int hough_value = 100;
static void on_hough(int, void*);
int main(int argc, char** argv) {
src = imread("E://1.jpg");
imshow("原图", src);
namedWindow("霍夫", WINDOW_AUTOSIZE);
createTrackbar("值:", "霍夫", &hough_value, 200, on_hough);
Canny(src, temp, 50, 200, 3);
cvtColor(temp, dst, COLOR_GRAY2BGR);
on_hough(hough_value, 0);
HoughLinesP(temp, lines, 1, CV_PI / 180, 80, 50, 10);
imshow("霍夫", dst);
waitKey(0);
}
void on_hough(int, void*) {
Mat tmp_dst = dst.clone();
Mat tmp_temp = temp.clone();
vector<Vec4i> mylines;
HoughLinesP(tmp_temp, mylines, 1, CV_PI / 180, hough_value + 1, 50.10);
for (size_t i = 0; i < mylines.size(); i++) {
Vec4i l = mylines[i];
line(tmp_dst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(23, 180, 55), 1, LINE_AA);
}
imshow("霍夫", tmp_dst);
}测试结果:
















 271
271











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









