



文章目录
概要
在运动与姿态检测领域,SPI 接口凭借其高速率、全双工通信特性,成为加速度计(如 ADXL345)和陀螺仪(如 MPU6050)实现实时数据传输的理想选择。这类传感器广泛应用于无人机姿态控制、智能手环运动追踪、机器人导航等场景,需要高频采集三维运动数据(加速度、角速度)以实现精准的姿态解算。
一、SPI 运动传感器系统架构
1. 硬件连接设计
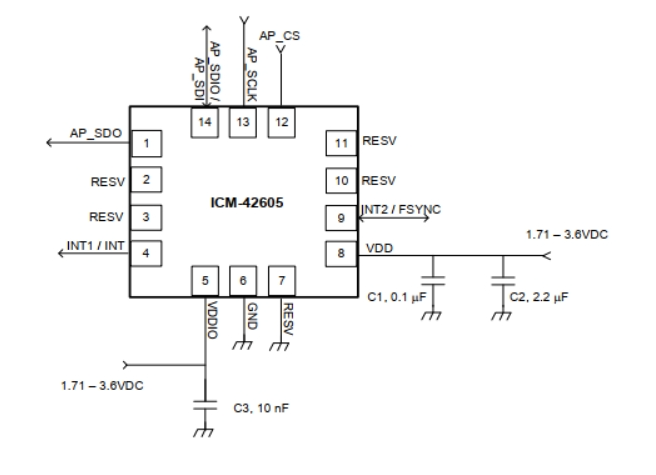
加速度计和陀螺仪与主控设备(如 STM32、ESP32)的 SPI 连接具有共性,但需注意传感器特有的引脚定义:
关键连接要点:
运动传感器对电源噪声敏感,需在 VCC 与 GND 间并联 100nF 陶瓷电容和 10μF 电解电容
高速 SPI 通信 (>5MHz) 时,信号线长度应控制在 5cm 以内,并采用等长布线
多传感器系统中,每个传感器应使用独立的 CS 线,避免数据冲突
MPU6050 的 SPI 模式需要特殊配置:将 FSYNC 引脚作为 SPI 的 CS, 并将 ADO 引脚接地
二、典型传感器 SPI 通信协议
1. ADXL345 加速度计
ADXL345 是一款低功耗、三轴加速度计,支持 ±16g 测量范围,SPI 通信特性如下:
通信速率: 最高 5MHz
数据格式: 16 位二进制补码,每轴 2 字节,共 6 字节 (xyz 顺序)
工作模式: 支持待机、测量、低功耗模式,可配置采样率 (10Hz~3200Hz)
中断功能: 可配置自由落体、运动检测等中断,通过 INT 引脚输出
// ADXL345寄存器地址
#define ADXL345_DEVID 0x00 // 设备ID
#define ADXL345_BW_RATE 0x2C // 带宽/速率控制
#define ADXL345_POWER_CTL 0x2D // 电源控制
#define ADXL345_DATA_FORMAT 0x31 // 数据格式
#define ADXL345_DATAX0 0x32 // X轴数据低8位
// 初始化ADXL345
void adxl345_init(void) {
// 片选拉低
ADXL345_CS_LOW();
// 读取设备ID(应为0xE5)
spi_send_byte(ADXL345_DEVID | 0x80); // 读命令(最高位为1)
uint8_t dev_id = spi_receive_byte();
if (dev_id != 0xE5) {
// 设备连接错误处理
}
// 配置电源模式: 测量模式
spi_send_byte(ADXL345_POWER_CTL);
spi_send_byte(0x08); // 使能测量模式
// 配置数据格式: 全分辨率,±16g范围
spi_send_byte(ADXL345_DATA_FORMAT);
spi_send_byte(0x0B);
// 配置采样率: 100Hz
spi_send_byte(ADXL345_BW_RATE);
spi_send_byte(0x0A);
// 片选拉高
ADXL345_CS_HIGH();
}
// 读取加速度数据(单位: g)
void adxl345_read_accel(float *x, float *y, float *z) {
uint8_t data[6];
int16_t x_raw, y_raw, z_raw;
ADXL345_CS_LOW();
// 发送读取数据命令,从DATAX0开始连续读取6字节
spi_send_byte(ADXL345_DATAX0 | 0x80 | 0x40); // 读+多字节标志
// 读取6字节数据
for (int i = 0; i < 6; i++) {
data[i] = spi_receive_byte();
}
ADXL345_CS_HIGH();
// 组合16位数据(低字节在前)
x_raw = (int16_t)((data[1] << 8) | data[0]);
y_raw = (int16_t)((data[3] << 8) | data[2]);
z_raw = (int16_t)((data[5] << 8) | data[4]);
// 转换为g值(全分辨率模式下: 1LSB = 0.00390625g)
*x = x_raw * 0.00390625f;
*y = y_raw * 0.00390625f;
*z = z_raw * 0.00390625f;
}
2. MPU6050 六轴运动传感器
MPU6050 集成三轴加速度计和三轴陀螺仪,支持 SPI 模式高速数据传输:
通信速率: 最高 1MHz (SPI 模式)
数据格式: 16 位 / 轴,加速度和陀螺仪各 6 字节,共 12 字节
测量范围: 加速度 ±2/±4/±8/±16g, 陀螺仪 ±250/±500/±1000/±2000°/s
硬件特性: 内置 16 位 ADC、温度传感器和 DMP (数字运动处理器)
// MPU6050寄存器地址
#define MPU6050_WHO_AM_I 0x75 // 设备ID
#define MPU6050_PWR_MGMT_1 0x6B // 电源管理
#define MPU6050_CONFIG 0x1A // 配置寄存器
#define MPU6050_GYRO_CONFIG 0x1B // 陀螺仪配置
#define MPU6050_ACCEL_CONFIG 0x1C // 加速度计配置
#define MPU6050_ACCEL_XOUT_H 0x3B // 加速度X轴高8位
// 初始化MPU6050为SPI模式
void mpu6050_init(void) {
// 片选拉低
MPU6050_CS_LOW();
// 读取设备ID(应为0x68)
spi_send_byte(MPU6050_WHO_AM_I | 0x80); // 读命令
uint8_t dev_id = spi_receive_byte();
if (dev_id != 0x68) {
// 设备连接错误处理
}
// 唤醒传感器(解除睡眠模式)
spi_send_byte(MPU6050_PWR_MGMT_1);
spi_send_byte(0x00);
// 配置陀螺仪范围: ±2000°/s
spi_send_byte(MPU6050_GYRO_CONFIG);
spi_send_byte(0x18);
// 配置加速度计范围: ±16g
spi_send_byte(MPU6050_ACCEL_CONFIG);
spi_send_byte(0x18);
// 配置SPI模式: 4线SPI
spi_send_byte(0x12); // USER_CTRL寄存器
spi_send_byte(0x00); // 禁用I2C,启用SPI
MPU6050_CS_HIGH();
}
// 读取加速度和陀螺仪数据
void mpu6050_read_data(float *ax, float *ay, float *az,
float *gx, float *gy, float *gz) {
uint8_t data[14]; // 14字节数据(加速度6+陀螺仪6+温度2)
int16_t ax_raw, ay_raw, az_raw;
int16_t gx_raw, gy_raw, gz_raw;
MPU6050_CS_LOW();
// 发送读取命令,从ACCEL_XOUT_H开始连续读取
spi_send_byte(MPU6050_ACCEL_XOUT_H | 0x80 | 0x40); // 读+多字节
// 读取14字节数据
for (int i = 0; i < 14; i++) {
data[i] = spi_receive_byte();
}
MPU6050_CS_HIGH();
// 解析加速度数据(高字节在前)
ax_raw = (int16_t)((data[0] << 8) | data[1]);
ay_raw = (int16_t)((data[2] << 8) | data[3]);
az_raw = (int16_t)((data[4] << 8) | data[5]);
// 解析陀螺仪数据
gx_raw = (int16_t)((data[8] << 8) | data[9]);
gy_raw = (int16_t)((data[10] << 8) | data[11]);
gz_raw = (int16_t)((data[12] << 8) | data[13]);
// 转换为物理单位
// 加速度: ±16g范围下,1LSB = 16*2/65536 = 0.00048828125g
*ax = ax_raw * 0.00048828125f;
*ay = ay_raw * 0.00048828125f;
*az = az_raw * 0.00048828125f;
// 陀螺仪: ±2000°/s范围下,1LSB = 2000*2/65536 ≈ 0.06103515625°/s
*gx = gx_raw * 0.06103515625f;
*gy = gy_raw * 0.06103515625f;
*gz = gz_raw * 0.06103515625f;
}
三、高速数据采集与姿态解算
1. 高频数据采集策略
运动传感器需要高频采集数据以准确捕捉快速运动,常用优化策略:
// 传感器数据缓冲区(循环缓冲区)
#define BUFFER_SIZE 1024
typedef struct {
float ax, ay, az; // 加速度
float gx, gy, gz; // 角速度
uint32_t timestamp; // 时间戳
} MotionData;
MotionData data_buffer[BUFFER_SIZE];
volatile uint16_t buffer_head = 0;
volatile uint16_t buffer_tail = 0;
// SPI DMA接收完成中断处理函数
void SPI_DMA_IRQHandler(void) {
if (SPI_GetITStatus(SPI1, SPI_IT_TXE) == SET) {
// 数据接收完成,更新缓冲区
data_buffer[buffer_head].timestamp = get_system_ticks();
buffer_head = (buffer_head + 1) % BUFFER_SIZE;
// 重新启动DMA传输
spi_dma_start_receive();
}
}
// 初始化高速采集系统
void motion_capture_init(void) {
// 初始化传感器
mpu6050_init();
// 配置SPI为DMA模式,提高传输效率
spi_dma_config(14); // MPU6050一次传输14字节
// 配置定时器触发采样,1kHz采样率
timer_config(1000); // 1ms触发一次
// 使能中断
NVIC_EnableIRQ(SPI_DMA_IRQn);
}
// 处理采集的数据
void process_motion_data(void) {
while (buffer_tail != buffer_head) {
MotionData *data = &data_buffer[buffer_tail];
// 姿态解算
update_orientation(data);
buffer_tail = (buffer_tail + 1) % BUFFER_SIZE;
}
}
- 姿态解算基础算法
通过 SPI 采集的加速度和角速度数据,可通过以下算法计算设备姿态:
// 姿态角(欧拉角)
typedef struct {
float roll; // 横滚角(度)
float pitch; // 俯仰角(度)
float yaw; // 偏航角(度)
} EulerAngles;
EulerAngles angles = {0};
float gyro_offset[3] = {0}; // 陀螺仪零漂校准值
// 互补滤波更新姿态
void update_orientation(MotionData *data) {
static uint32_t last_time = 0;
float dt; // 时间间隔(秒)
// 计算采样时间间隔
dt = (data->timestamp - last_time) / 1000.0f;
last_time = data->timestamp;
// 去除陀螺仪零漂
float gx = data->gx - gyro_offset[0];
float gy = data->gy - gyro_offset[1];
float gz = data->gz - gyro_offset[2];
// 从加速度计计算角度(静态时可靠)
float accel_roll = atan2(data->ay, data->az) * 180.0f / M_PI;
float accel_pitch = atan2(-data->ax, sqrt(data->ay*data->ay + data->az*data->az)) * 180.0f / M_PI;
// 从陀螺仪积分计算角度(动态时可靠)
angles.roll += gx * dt;
angles.pitch += gy * dt;
angles.yaw += gz * dt;
// 互补滤波融合两种数据(权重根据采样率调整)
angles.roll = 0.96f * angles.roll + 0.04f * accel_roll;
angles.pitch = 0.96f * angles.pitch + 0.04f * accel_pitch;
}
// 陀螺仪零漂校准
void calibrate_gyro(void) {
const int samples = 1000;
float gx_sum = 0, gy_sum = 0, gz_sum = 0;
// 采集静止状态下的陀螺仪数据
for (int i = 0; i < samples; i++) {
float ax, ay, az, gx, gy, gz;
mpu6050_read_data(&ax, &ay, &az, &gx, &gy, &gz);
gx_sum += gx;
gy_sum += gy;
gz_sum += gz;
delay_ms(1);
}
// 计算零漂平均值
gyro_offset[0] = gx_sum / samples;
gyro_offset[1] = gy_sum / samples;
gyro_offset[2] = gz_sum / samples;
}
四、多传感器同步与应用场景
1. 多传感器时间同步
在无人机等高端应用中,常需多个传感器同步采集:
// 多传感器同步采集控制
void sync_sensors(void) {
// 1. 配置主传感器(MPU6050)产生同步脉冲
mpu6050_enable_sync_pulse(1000); // 1kHz同步脉冲
// 2. 将同步脉冲连接到其他传感器的外部触发引脚
// 3. 配置所有传感器在收到同步脉冲时同时采样
// 4. 主控在收到同步中断时,通过SPI读取所有传感器数据
}
2. 典型应用场景
(1) 无人机姿态控制
采用 MPU6050 以 1kHz 频率采集数据
通过 SPI DMA 传输到 STM32 主控
结合互补滤波或卡尔曼滤波计算姿态
实时调整电机输出,实现稳定悬停和飞行控制
(2) 智能手环运动追踪
采用低功耗加速度计 ADXL345, 配置为 50Hz 采样率
检测步数:通过 Z 轴加速度变化识别步伐
活动识别:分析三轴加速度特征区分走、跑、爬楼梯
SPI 通信采用中断方式,平时传感器处于低功耗模式
(3) 机器人导航
组合加速度计、陀螺仪和磁力计构成 AHRS 系统
SPI 高速传输数据用于航迹推算
融合里程计数据实现室内定位
采用 100Hz 采样率满足导航精度要求
五、性能优化与可靠性设计
1. 传输速率优化
SPI 时钟调整: 根据传感器特性设置最高支持速率 (ADXL345:5MHz,MPU6050:1MHz)
DMA 传输: 对于连续多字节读取,使用 DMA 减少 CPU 占用
批量读取: 一次 SPI 通信读取所有轴数据,减少命令开销
2. 噪声抑制
运动传感器对机械振动和电磁干扰敏感,需采取:
硬件措施:
传感器与主板间使用软胶减震
SPI 信号线添加 RC 滤波 (100Ω 电阻 + 100pF 电容)
电源端使用 LDO 稳压,减少电源噪声
软件措施:
数据平滑滤波 (滑动平均、中值滤波)
传感器校准 (零漂校准、轴对准校准)
异常值检测与剔除
3. 低功耗设计
对于电池供电设备 (如智能手环):
传感器配置为低功耗模式,采样率动态调整 (静止时降低至 10Hz)
SPI 通信完成后立即关闭 SPI 外设时钟
利用传感器的中断功能,仅在检测到运动时唤醒主控
采用自动休眠机制,无活动时进入深度睡眠
六、常见问题与解决方案

总结
SPI 接口为运动与姿态传感器提供了高速、可靠的数据传输通道,是实现实时姿态检测的关键技术。在实际应用中,需根据具体场景 (如无人机、智能手环) 优化 SPI 通信参数和数据处理策略:
硬件设计注重信号完整性和电源稳定性,减少噪声干扰
软件实现采用高效的数据采集机制 (DMA、中断) 满足实时性要求
通过传感器校准和数据融合算法提高姿态检测精度
针对功耗敏感应用,优化采样率和工作模式


















 1499
1499

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











