







转用MDK有一段时间了,越来越觉得MDK的强大,因为我之前都是用ADS1.2开发产品,所以更能体会到MDK的强大与易用性。MDK编译出来的代码与ADS1.2相比,代码量减少了很多,我的一个工程用ADS1.2编译为25.4KB(都是bin格式),但用MDK编译出来仅有19.5KB(采用默认优化级别,即L2优化级别)。根据我个人的经验,使用一个新的编译器,难点往往有三个,一个是建立一个新的工程,以及工程项目的配置;二是启动代码的编写;三是如何下载和单步调试。今天重点写一下MDK的启动代码。使用MDK版本为V4.01。
MDK编译器所追求的是要让arm 处理器像单片机那样简单使用,所以每个厂家的各种ARM,MDK都会有一个自带的启动代码,值得提出的是,这个启动代码可以用图形化界面来配置,这对刚入门的人来说绝对是一条捷径。
下面看一下MDK的启动代码以及图形化界面。
1.新建一个工程
单击Project ->New...->µVision Project菜单项,µVision 4将打开一个标准对话框,输入希望新建工程的名字即可创建一个新的工程,建议对每个新建工程使用独立的文件夹。
2.选择设备
在创建一个新的工程时,µVision要求为这个工程选择一款CPU。选择设备对话框显示了µVision的设备数据库,只需要选择用户所需的微控制器即可。例如,选择 Philips LPC2114微控制器,这个选择设置了LPC2114设备的必要工具选项、简化了工具的配置。
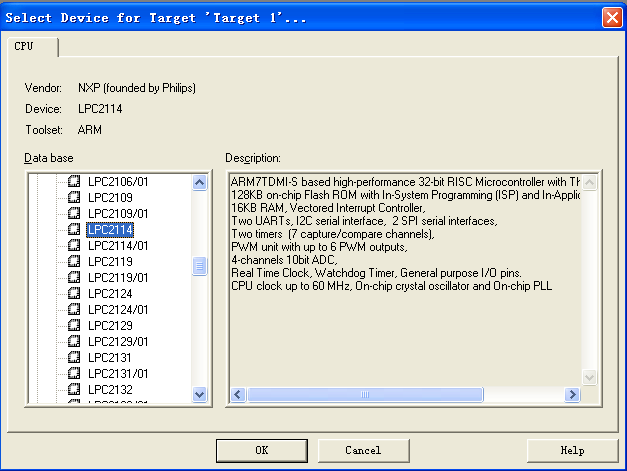
当创建一个新的工程时,µVision会自动为所选择的CPU添加合适的启动代码。如下图,点击确定即可复制LPC2100的启动代码。

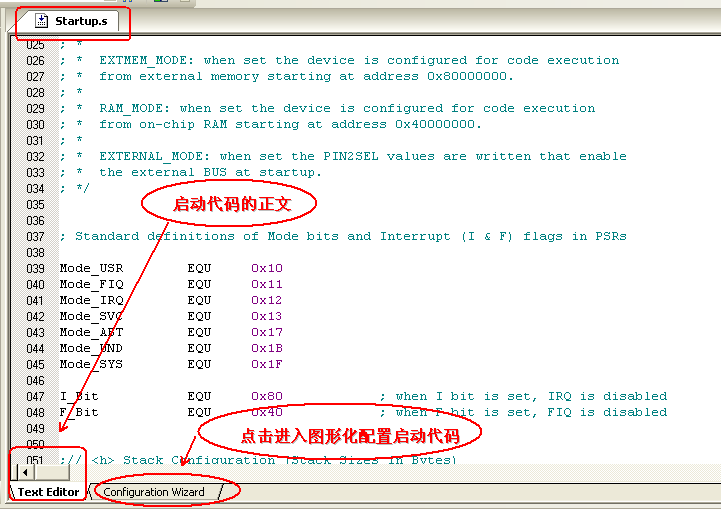
启动代码的正文如下所示:
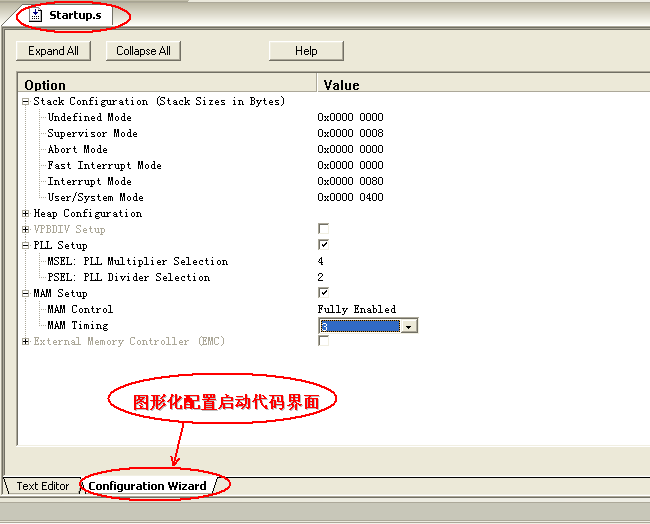
启动代码的图形配置界面:
µVision 4的配置向导通过菜单的方式对汇编程序、C程序或调试初始化文件进行配置。在配置文件中,对应这些配置菜单的是控制项(和html中的标签相似),它们嵌入在配置文件的注释中。
下面对启动代码做详细注释:
;/*****************************************************************************/
;/* STARTUP.S: Startup file for Philips LPC2000 */
;/*****************************************************************************/
;/* <<< Use Configuration Wizard in Context Menu >>> */
;/*****************************************************************************/
;/* This file is part of the uVision/ARM development tools. */
;/* Copyright (c) 2005-2007 Keil Software. All rights reserved. */
;/* This software may only be used under the terms of a valid, current, */
;/* end user licence from KEIL for a compatible version of KEIL software */
;/* development tools. Nothing else gives you the right to use this software. */
;/*****************************************************************************/
这段是一些说明,无非说些版权,时间信息等,注意红色标注出的语句必须在前100行文本中声明如下语句,这样编辑器将以配置向导视图的形式打开配置文件。
; Standard definitions of Mode bits and Interrupt (I & F) flags in PSRs
Mode_USR EQU 0x10
Mode_FIQ EQU 0x11
Mode_IRQ EQU 0x12
Mode_SVC EQU 0x13
Mode_ABT EQU 0x17
Mode_UND EQU 0x1B
Mode_SYS EQU 0x1F
I_Bit EQU 0x80 ; when I bit is set, IRQ is disabled
F_Bit EQU 0x40 ; when F bit is set, FIQ is disabled
这段代码用于定义一些模式,以及定义中断屏蔽位。
;// <h> Stack Configuration (Stack Sizes in Bytes)
;// <o0> Undefined Mode <0x0-0xFFFFFFFF:8>
;// <o1> Supervisor Mode <0x0-0xFFFFFFFF:8>
;// <o2> Abort Mode <0x0-0xFFFFFFFF:8>
;// <o3> Fast Interrupt Mode <0x0-0xFFFFFFFF:8>
;// <o4> Interrupt Mode <0x0-0xFFFFFFFF:8>
;// <o5> User/System Mode <0x0-0xFFFFFFFF:8>
;// </h>
UND_Stack_Size EQU 0x00000000
SVC_Stack_Size EQU 0x00000008
ABT_Stack_Size EQU 0x00000000
FIQ_Stack_Size EQU 0x00000000
IRQ_Stack_Size EQU 0x00000080
USR_Stack_Size EQU 0x00000400
ISR_Stack_Size EQU (UND_Stack_Size + SVC_Stack_Size + ABT_Stack_Size + /
FIQ_Stack_Size + IRQ_Stack_Size)
AREA STACK, NOINIT, READWRITE, ALIGN=3
Stack_Mem SPACE USR_Stack_Size
__initial_sp SPACE ISR_Stack_Size
Stack_Top
这一段配置堆栈空间,注意红色部分可以生成图形化的界面,
<h>--Heading标题:表示以下选项在一个组中,直到遇到</h> ,表示Heading标题标题结束。
<ox>(x=1,2,3...)--表示可以指定一个值的范围
User/System Mode <0x0-0xFFFFFFFF:8>--表示用户模式下堆栈范围为0~0xFFFFFFFF之间,数字“8”表示每次递增或递减的步长为8.
上面代码生成的图形化配置界面如下图:
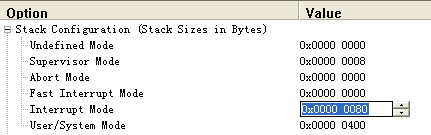
若将上图的interrupt Mode的值该为0x0000 0100,则启动代码的“IRQ_Stack_Size EQU 0x00000080”自动变为“IRQ_Stack_Size EQU 0x00000100”
;// <h> Heap Configuration
;// <o> Heap Size (in Bytes) <0x0-0xFFFFFFFF>
;// </h>
Heap_Size EQU 0x00000000
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base
Heap_Mem SPACE Heap_Size
__heap_limit
配置堆的大小,情况与配置堆栈十分相识。
;// <e> VPBDIV Setup
;// <i> Peripheral Bus Clock Rate
;// <o1.0..1> VPBDIV: VPB Clock
;// <0=> VPB Clock = CPU Clock / 4
;// <1=> VPB Clock = CPU Clock
;// <2=> VPB Clock = CPU Clock / 2
;// <o1.4..5> XCLKDIV: XCLK Pin
;// <0=> XCLK Pin = CPU Clock / 4
;// <1=> XCLK Pin = CPU Clock
;// <2=> XCLK Pin = CPU Clock / 2
;// </e>
VPBDIV_SETUP EQU 1
VPBDIV_Val EQU 0x00000000
; Phase Locked Loop (PLL) definitions
PLL_BASE EQU 0xE01FC080 ; PLL Base Address
PLLCON_OFS EQU 0x00 ; PLL Control Offset
PLLCFG_OFS EQU 0x04 ; PLL Configuration Offset
PLLSTAT_OFS EQU 0x08 ; PLL Status Offset
PLLFEED_OFS EQU 0x0C ; PLL Feed Offset
PLLCON_PLLE EQU (1<<0) ; PLL Enable
PLLCON_PLLC EQU (1<<1) ; PLL Connect
PLLCFG_MSEL EQU (0x1F<<0) ; PLL Multiplier
PLLCFG_PSEL EQU (0x03<<5) ; PLL Divider
PLLSTAT_PLOCK EQU (1<<10) ; PLL Lock Status
配置VPBDIV
<e> --Heading且Enable标题:表示以下选项在一个组中,选项可通过Checkbox使能
<o1.0..1>---修改数值的指定位
上面代码生成的图形化配置界面如下图:

;// <e> PLL Setup
;// <o1.0..4> MSEL: PLL Multiplier Selection
;// <1-32><#-1>
;// <i> M Value
;// <o1.5..6> PSEL: PLL Divider Selection
;// <0=> 1 <1=> 2 <2=> 4 <3=> 8
;// <i> P Value
;// </e>
PLL_SETUP EQU 1
PLLCFG_Val EQU 0x00000023
配置PLL。情况与配置VPBDIV十分相似。
; Memory Accelerator Module (MAM) definitions
MAM_BASE EQU 0xE01FC000 ; MAM Base Address
MAMCR_OFS EQU 0x00 ; MAM Control Offset
MAMTIM_OFS EQU 0x04 ; MAM Timing Offset
;// <e> MAM Setup
;// <o1.0..1> MAM Control
;// <0=> Disabled
;// <1=> Partially Enabled
;// <2=> Fully Enabled
;// <i> Mode
;// <o2.0..2> MAM Timing
;// <0=> Reserved <1=> 1 <2=> 2 <3=> 3
;// <4=> 4 <5=> 5 <6=> 6 <7=> 7
;// <i> Fetch Cycles
;// </e>
MAM_SETUP EQU 1
MAMCR_Val EQU 0x00000002
MAMTIM_Val EQU 0x00000004
配置存储器加速模块,情况与配置VPBDIV十分相似。
; External Memory Controller (EMC) definitions
EMC_BASE EQU 0xFFE00000 ; EMC Base Address
BCFG0_OFS EQU 0x00 ; BCFG0 Offset
BCFG1_OFS EQU 0x04 ; BCFG1 Offset
BCFG2_OFS EQU 0x08 ; BCFG2 Offset
BCFG3_OFS EQU 0x0C ; BCFG3 Offset
;// <e> External Memory Controller (EMC)
EMC_SETUP EQU 0
;// <e> Bank Configuration 0 (BCFG0)
;// <o1.0..3> IDCY: Idle Cycles <0-15>
;// <o1.5..9> WST1: Wait States 1 <0-31>
;// <o1.11..15> WST2: Wait States 2 <0-31>
;// <o1.10> RBLE: Read Byte Lane Enable
;// <o1.26> WP: Write Protect
;// <o1.27> BM: Burst ROM
;// <o1.28..29> MW: Memory Width <0=> 8-bit <1=> 16-bit
;// <2=> 32-bit <3=> Reserved
;// </e>
BCFG0_SETUP EQU 0
BCFG0_Val EQU 0x0000FBEF
;// <e> Bank Configuration 1 (BCFG1)
;// <o1.0..3> IDCY: Idle Cycles <0-15>
;// <o1.5..9> WST1: Wait States 1 <0-31>
;// <o1.11..15> WST2: Wait States 2 <0-31>
;// <o1.10> RBLE: Read Byte Lane Enable
;// <o1.26> WP: Write Protect
;// <o1.27> BM: Burst ROM
;// <o1.28..29> MW: Memory Width <0=> 8-bit <1=> 16-bit
;// <2=> 32-bit <3=> Reserved
;// </e>
BCFG1_SETUP EQU 0
BCFG1_Val EQU 0x0000FBEF
;// <e> Bank Configuration 2 (BCFG2)
;// <o1.0..3> IDCY: Idle Cycles <0-15>
;// <o1.5..9> WST1: Wait States 1 <0-31>
;// <o1.11..15> WST2: Wait States 2 <0-31>
;// <o1.10> RBLE: Read Byte Lane Enable
;// <o1.26> WP: Write Protect
;// <o1.27> BM: Burst ROM
;// <o1.28..29> MW: Memory Width <0=> 8-bit <1=> 16-bit
;// <2=> 32-bit <3=> Reserved
;// </e>
BCFG2_SETUP EQU 0
BCFG2_Val EQU 0x0000FBEF
;// <e> Bank Configuration 3 (BCFG3)
;// <o1.0..3> IDCY: Idle Cycles <0-15>
;// <o1.5..9> WST1: Wait States 1 <0-31>
;// <o1.11..15> WST2: Wait States 2 <0-31>
;// <o1.10> RBLE: Read Byte Lane Enable
;// <o1.26> WP: Write Protect
;// <o1.27> BM: Burst ROM
;// <o1.28..29> MW: Memory Width <0=> 8-bit <1=> 16-bit
;// <2=> 32-bit <3=> Reserved
;// </e>
BCFG3_SETUP EQU 0
BCFG3_Val EQU 0x0000FBEF
;// </e> End of EMC
配置外部存储器,情况和配置VPBDIV类似。
; External Memory Pins definitions
PINSEL2 EQU 0xE002C014 ; PINSEL2 Address
PINSEL2_Val EQU 0x0E6149E4 ; CS0..3, OE, WE, BLS0..3,
; D0..31, A2..23, JTAG Pins
定义外部存储器引脚。
PRESERVE8
; Area Definition and Entry Point
; Startup Code must be linked first at Address at which it expects to run.
AREA RESET, CODE, READONLY
ARM ;声明使用ARM模式
默认连接下,启动代码必须放在RESET段内
; Exception Vectors
; Mapped to Address 0.
; Absolute addressing mode must be used.
; Dummy Handlers are implemented as infinite loops which can be modified.
Vectors LDR PC, Reset_Addr ;定义异常向量-复位
LDR PC, Undef_Addr ;未定义指令
LDR PC, SWI_Addr ;软件中中断
LDR PC, PAbt_Addr ;预取指中止
LDR PC, DAbt_Addr ;数据中止
NOP ; Reserved Vector 保留
; LDR PC, IRQ_Addr ;IRQ中断,用下面的语句代替本句,这样能更快的进入中断
LDR PC, [PC, #-0x0FF0] ; 从VicVectAddr寄存器读取中断向量地址. 当CPU执行这条指令还没有跳转时,
; PC的值为0x0000 0020. 0x0000 0020减去0x0ff0为0xFFFF F030这是向量控制寄
; 存器的特殊寄存器VicVectAddr,这个寄存器保存当前IRQ中断服务程序的入口地址
LDR PC, FIQ_Addr
Reset_Addr DCD Reset_Handler ;默认连接下,复位异常服务函数名必须声明为Reset_Handler,这是程序默认入口
Undef_Addr DCD Undef_Handler
SWI_Addr DCD SWI_Handler
PAbt_Addr DCD PAbt_Handler
DAbt_Addr DCD DAbt_Handler
DCD 0 ; Reserved Address
IRQ_Addr DCD IRQ_Handler
FIQ_Addr DCD FIQ_Handler
Undef_Handler B Undef_Handler ;跳转到复位异常服务函数
SWI_Handler B SWI_Handler ;一般情况下,由于PLC2100系列并不需要软件中断,预取指中止等异常,所以这些
PAbt_Handler B PAbt_Handler ;异常服务程序只是原地循环
DAbt_Handler B DAbt_Handler
IRQ_Handler B IRQ_Handler
FIQ_Handler B FIQ_Handler
; Reset Handler 程序复位后进入
EXPORT Reset_Handler ;声明外部符号,这个符号由keil MDK编译器提供,是程序的入口
Reset_Handler
; Setup External Memory Pins ;设置外部存储器引脚
IF :DEF:EXTERNAL_MODE ;如果在keil编译器的Project-options-Asm-Define下键入EXTERNAL_MODE,则执行
;以下代码,EXTERNAL_MODE表示从片外Flash Rom执行代码.
LDR R0, =PINSEL2
LDR R1, =PINSEL2_Val
STR R1, [R0]
ENDIF
; Setup External Memory Controller
IF EMC_SETUP <> 0 ;如果EMC_SETUP=1,则执行IF...ENDIF之间的代码.
;当在Configuration Wizard(图形化配置启动代码,keil的一大特色),中,选中
;External Memory Controller (EMC)时,EMC_SETUP=1,否则该值为0.
LDR R0, =EMC_BASE
IF BCFG0_SETUP <> 0
LDR R1, =BCFG0_Val
STR R1, [R0, #BCFG0_OFS]
ENDIF
IF BCFG1_SETUP <> 0
LDR R1, =BCFG1_Val
STR R1, [R0, #BCFG1_OFS]
ENDIF
IF BCFG2_SETUP <> 0
LDR R1, =BCFG2_Val
STR R1, [R0, #BCFG2_OFS]
ENDIF
IF BCFG3_SETUP <> 0
LDR R1, =BCFG3_Val
STR R1, [R0, #BCFG3_OFS]
ENDIF
ENDIF ; EMC_SETUP
; Setup VPBDIV
IF VPBDIV_SETUP <> 0
LDR R0, =VPBDIV
LDR R1, =VPBDIV_Val
STR R1, [R0]
ENDIF
; Setup PLL
IF PLL_SETUP <> 0
LDR R0, =PLL_BASE ;指向PLL控制器第一个寄存器地址,即PLLCON(PLL控制寄存器)
;PLL_BASE+PLLCON_OFS=PLLCON(PLL控制寄存器)
;PLL_BASE+PLLCFG_OFS=PLLCFG(PLL配置寄存器)
;PLL_BASE+PLLFEED_OFS=PLLFEED(PLL馈送寄存器)
;PLL_BASE+PLLSTAT_OFS=PLLSTAT(PLL状态寄存器)
MOV R1, #0xAA ;馈送序列
MOV R2, #0x55
; Configure and Enable PLL
MOV R3, #PLLCFG_Val ;写入PLL配置寄存器中的值
STR R3, [R0, #PLLCFG_OFS] ;PLL配置寄存器:PLLCFG
;bit[4:0] bit[6:5] bit7
; | | |
; | | - 保留
; | -- PSEL[1:0]:PLL分频器值
; --- MSEL[4:0]: PLL倍频值
MOV R3, #PLLCON_PLLE ;PLL使能值
STR R3, [R0, #PLLCON_OFS] ;PLL控制寄存器:PLLCON
;bit0 bit1 bit[7:2]
; | | |
; | | - 保留
; | -- PLLC: PLL连接.当PLLE和PLLC都为1且在有效的PLL馈送后,将PLL
; | 作为时钟源连接到lpc211x,否则,cpu直接用振荡器时钟.
; --- PLL使能.当该为为1并且有效的PLL馈送之后,该位将激活PLL并锁定到指定频率
STR R1, [R0, #PLLFEED_OFS] ;PLL馈送寄存器:PLLFEED
STR R2, [R0, #PLLFEED_OFS] ; bit[7:0]
; |
; -将正确的序列馈送到该寄存器,才能使PLL配置和控制寄存器的更改生效.
; Wait until PLL Locked
PLL_Loop LDR R3, [R0, #PLLSTAT_OFS] ;读PLL状态寄存器(PLLSTAT)的值
;bit[4:0] bit[6:5] bit7 bit8 bit9 bit10 bit[15:11]
; | | | | | | |
; | | | | | | - 保留
; | | | | | - PLOCK:为1时,PLL锁定
; | | | | | 到指定的频率
; | | | | -- PLLC:读出PLL连接位的值
; | | | --- PLLE:读出的PLL使能位状态值
; | | ---- 保留
; | ----- PSEL[1:0]:读出的PLL分频器值
; ------ MSEL[4:0]:读出的PLL倍频器值
ANDS R3, R3, #PLLSTAT_PLOCK ;后缀-s更新标志位:N, Z, C, V
; | | | |
; | | | - 溢出
; | | -- 进位或借位或扩展
; | --- 零
; ---- 负或小于
BEQ PLL_Loop ;为零则转
; Switch to PLL Clock
MOV R3, #(PLLCON_PLLE:OR:PLLCON_PLLC) ;PLL使能,连接使能
STR R3, [R0, #PLLCON_OFS]
STR R1, [R0, #PLLFEED_OFS] ;馈送序列
STR R2, [R0, #PLLFEED_OFS]
ENDIF ; PLL_SETUP
; Setup MAM 设置MAM(存储器加速模块)
IF MAM_SETUP <> 0 ;当在Configuration Wizard(图形化配置启动代)中选中MAM Setup,则MAM_SETUP=1
LDR R0, =MAM_BASE ;MAM基地址,为0xE01F C000
MOV R1, #MAMTIM_Val ;MAM取指周期,周立功公司出版的一本书中建议:若系统时钟低于20MHZ,不用使用
;MAM;当系统时钟在20~40MHZ时,建议Flash访问时间设定为2个处理器周期;当系统
;周期大于40MHZ时,建议使用3个处理器周期
;该值会根据Configuration Wizard(图形化配置启动代)中MAM timing选择而变化
STR R1, [R0, #MAMTIM_OFS] ;将R1值送入MAM定时寄存器:MAMTIM
; bit[2:0] bit[7:3]
; | |
; | - 保留
; -- MAM取指周期设定,这几位决定MAM Flash取指操作的时间:
; 000=0:保留
; 001=1:MAM取指周期为1个处理器时钟
; 010=2:MAM取指周期为2个处理器时钟
; ... ...
; xxx=n: MAM取指周期为n个处理器时钟(n=3,4,5,6,7)
MOV R1, #MAMCR_Val ;MAM模式控制值(0~2)
;该值会根据Configuration Wizard(图形化配置启动代)中MAM Control选择而改变
STR R1, [R0, #MAMCR_OFS] ;将R1值送入MAM控制寄存器:MAMCR
; bit[1:0] bit[7:2]
; | |
; | - 保留,不要向其写1
; -- MAM模式控制位,决定了MAM的操作模式
; 00:MAM被禁止
; 01:MAM部分使能
; 10:MAM功能完全使能
; 11:保留
ENDIF ; MAM_SETUP
; Memory Mapping (when Interrupt Vectors are in RAM) 存储器映射
MEMMAP EQU 0xE01FC040 ; Memory Mapping Control
IF :DEF:REMAP ;如果在keil编译器的Project-options-Asm-Define下键入MEMAP,则执行以下代码,
;REMAP表示在某些设备上执行存储映射
LDR R0, =MEMMAP
IF :DEF:EXTMEM_MODE ;判断是否从片外Flash ROM执行代码
MOV R1, #3
ELIF :DEF:RAM_MODE ;判断是否从RAM执行代码
MOV R1, #2 ;MEMMAP=0x02即可从RAM执行代码
ELSE
MOV R1, #1
ENDIF
STR R1, [R0]
ENDIF
; Initialise Interrupt System 初始化一些中断信息,
; ...
; Setup Stack for each mode
LDR R0, =Stack_Top
; Enter Undefined Instruction Mode and set its Stack Pointer
MSR CPSR_c, #Mode_UND:OR:I_Bit:OR:F_Bit
MOV SP, R0
SUB R0, R0, #UND_Stack_Size
; Enter Abort Mode and set its Stack Pointer
MSR CPSR_c, #Mode_ABT:OR:I_Bit:OR:F_Bit
MOV SP, R0
SUB R0, R0, #ABT_Stack_Size
; Enter FIQ Mode and set its Stack Pointer
MSR CPSR_c, #Mode_FIQ:OR:I_Bit:OR:F_Bit
MOV SP, R0
SUB R0, R0, #FIQ_Stack_Size
; Enter IRQ Mode and set its Stack Pointer
MSR CPSR_c, #Mode_IRQ:OR:I_Bit:OR:F_Bit
MOV SP, R0
SUB R0, R0, #IRQ_Stack_Size
; Enter Supervisor Mode and set its Stack Pointer
MSR CPSR_c, #Mode_SVC:OR:I_Bit:OR:F_Bit
MOV SP, R0
SUB R0, R0, #SVC_Stack_Size
; Enter User Mode and set its Stack Pointer
MSR CPSR_c, #Mode_USR
IF :DEF:__MICROLIB
EXPORT __initial_sp
ELSE
MOV SP, R0
SUB SL, SP, #USR_Stack_Size ;SL指的是R10
ENDIF
; Enter the C code
IMPORT __main
LDR R0, =__main
BX R0
IF :DEF:__MICROLIB
EXPORT __heap_base
EXPORT __heap_limit
ELSE
; User Initial Stack & Heap
AREA |.text|, CODE, READONLY
IMPORT __use_two_region_memory
EXPORT __user_initial_stackheap
__user_initial_stackheap
LDR R0, = Heap_Mem
LDR R1, =(Stack_Mem + USR_Stack_Size)
LDR R2, = (Heap_Mem + Heap_Size)
LDR R3, = Stack_Mem
BX LR
ENDIF
END















 1061
1061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









