









文章目录
同系列链接
1. pinhole camera model【cs231a课程笔记】
2. Single View Metrology【cs231a课程笔记】
3. epipolar geometry【cs231a课程笔记】
4. tereo Systems and Structure from Motion【cs231a课程笔记】
5. Active and Volumetric Stereo【cs231a课程笔记】
2.1. Single View Metrology
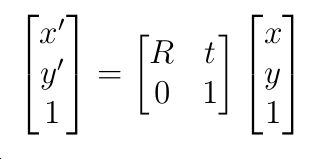
Isometric transformations(等度量变换):平移、旋转
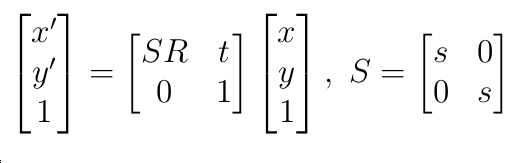
Similarity transformations(相似变换):平移、旋转、缩放
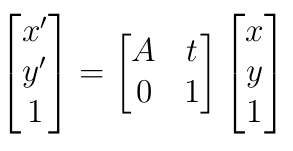
Affine transformation(仿射变换):平移、旋转、缩放、xy轴叠加(shear剪切)
对应线性空间的变换,保持比例、平行关系
Projective transformation \ homographies(透视变换 \ 单应变换) \ Perspective transformation(透视变换)
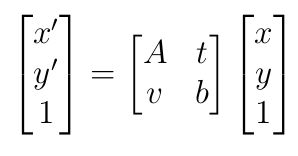
不保留平行关系,但是保留了cross ratio
2.2. point and line in infinity
orthogonal 正交的,垂直的
intersect 相交
infinity 无限
若点x属于线l,则
x
T
l
=
0
x^Tl=0
xTl=0 ,
l
1
与
l
2
l_1与l_2
l1与l2相交则
x
=
l
1
l
2
x=l_1 l_2
x=l1l2
ideal point(每一组平行线在无穷远处相交于一点)
multi view stereo双目重建
lines at infinity:
![]()
c任取值,有
![]()
对于投影变换,ideal point不再是无限远(平行线会有交点)
而对于仿射变换,ideal point仍然是无限远。
对于infinity line也是如此。
x T I l = x T H T H − T l = 0 x^TIl=x^TH^TH^{-T}l=0 xTIl=xTHTH−Tl=0, 令 x ′ = H x ,则有 l ′ = H − T l 令x'=Hx,则有l'=H^{-T}l 令x′=Hx,则有l′=H−Tl,所以投影变换不再是无限远。
仿射变换仍是。
2.3. Vanishing Points and Lines, Plane
表示一个平面(plane):d是原点沿(a,b,c)向量方向到该平面的距离
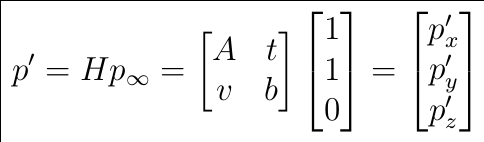
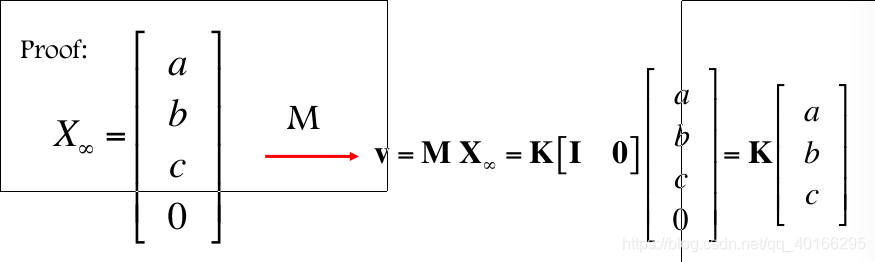
我们用映射变换将ideal point变换到三维空间中的一个点vanishing point。
取三维空间中的一组平行线,
d
=
(
a
,
b
,
c
)
d=(a,b,c)
d=(a,b,c)方向,相交于vanishing point
v
=
K
d
v=Kd
v=Kd(K是相机内参) 证明:
然后有
对于一个平面,上面的每组平行线都有vanishing point,组成了vanishing line,投影变换到image plane后,称为horizon line(地平线)
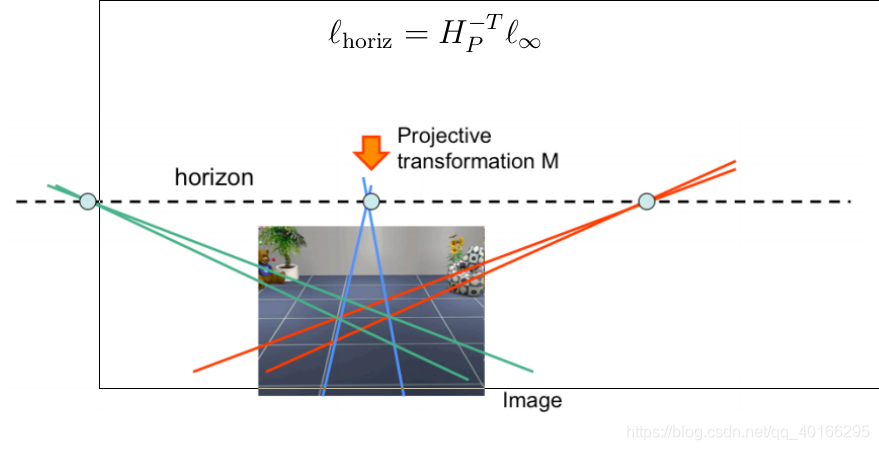
我们可以用horizon line判断是否平行,还可以加上相机参数判断该平面的法向量
n
=
K
T
l
h
o
r
i
z
n=K^Tl_{horiz}
n=KTlhoriz.
所有的horizon line又组成了planes at infinity
特性
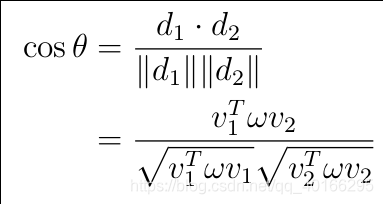
两组平行线(方向
d
1
,
d
2
d_1, d_2
d1,d2),infinity point
x
1
,
∞
,
x
2
,
∞
x_{1, \infin}, x_{2, \infin}
x1,∞,x2,∞,对应vanishing point
v
1
,
v
2
v_1, v_2
v1,v2,两个方向
d
1
,
d
2
d_1, d_2
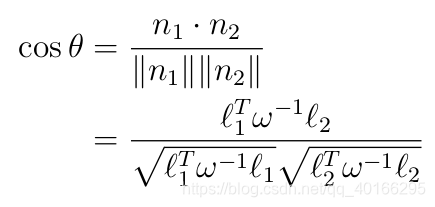
d1,d2夹角是
θ
\theta
θ,有:

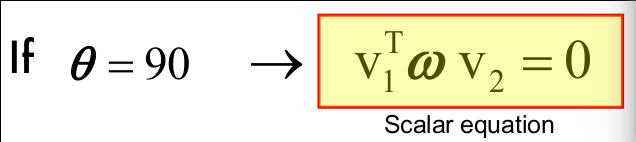
对于两个平面,也是如此:
2.4. A Single View Metrology Example(单视图方法)
perpendicular 垂直的
Cholesky decomposition(Cholesky分解):比一个对称正定矩阵表示成一个下三角矩阵。
假设已知两个互相垂直的平面,上面各有一对平行线,首先利用各种限制条件化简w
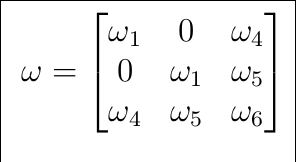
解出w后,可以Cholesky分解得到k,从而复原三维图像。















 761
761











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









