






使用软件版本VS2019,PCL1.11,安装配置过程参考其他博主的文章。
测试时出现的问题:未加载符号文件,没有为 ×××.dll 加载的符号文件。
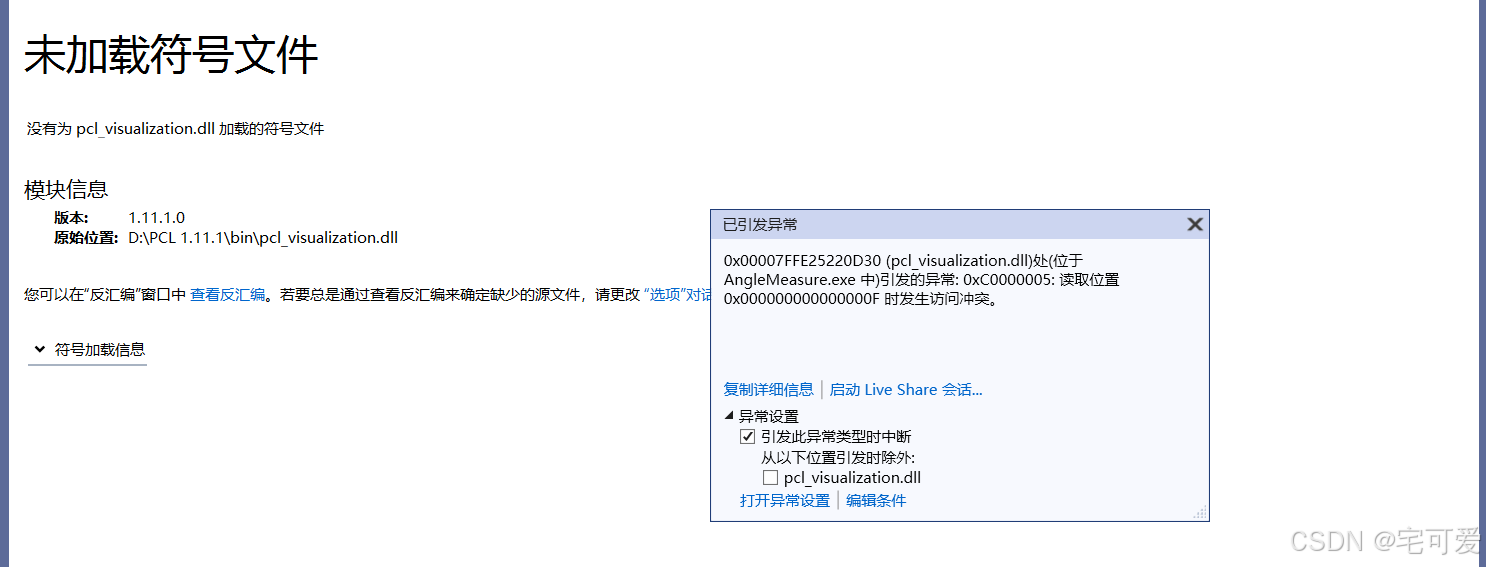
首先根据其他博文重新检查了包含目录、库目录、附加依赖项和系统环境变量设置,在PATH中添加了库文件的地址,问题未解决。在排查过程中发现附加依赖项所添加的.lib在debug和release下未区分,但实际lib文件做了区分。以d结尾的为debug重要添加的,同名的另一个添加的release中,二者不能添加一样的。在附加依赖项中改正后软件运行正常。
pcl_common.lib
pcl_commond.lib
pcl_features.lib
pcl_featuresd.lib
pcl_filters.lib
pcl_filtersd.lib
pcl_io.lib
pcl_iod.lib
使用的测试代码有两个:
#include<iostream>
#include<pcl/io/io.h>
#include<pcl/io/pcd_io.h>
#include<pcl/io/ply_io.h>
#include<pcl/visualization/cloud_viewer.h>
int user_data;
using std::cout;
void viewerOneOff(pcl::visualization::PCLVisualizer& viewer) {
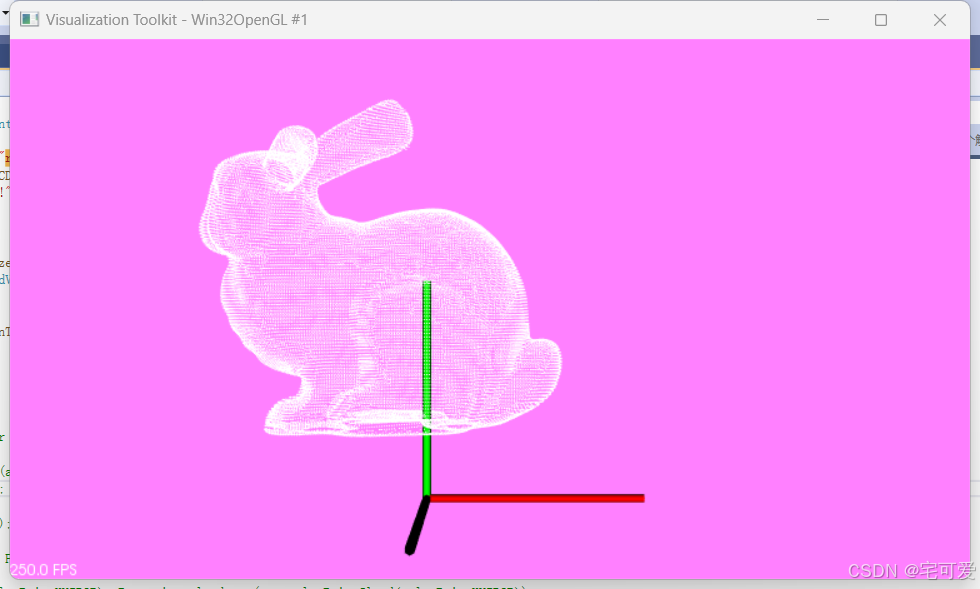
viewer.setBackgroundColor(1.0, 0.5, 1.0); //设置背景颜色
}
int main() {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
char strfilepath[256] = "rabbit.pcd";
if (-1 == pcl::io::loadPCDFile(strfilepath, *cloud)) {
cout << "error input!" << endl;
return -1;
}
cout << cloud->points.size() << endl;
pcl::visualization::CloudViewer viewer("Cloud Viewer"); //创建viewer对象
viewer.showCloud(cloud);
viewer.runOnVisualizationThreadOnce(viewerOneOff);
system("pause");
return 0;
运行成功截图为:
测试代码2:
#include <iostream>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/console/parse.h>
int main(int argc, char** argv) {
std::cout << "Test PCL !!!" << std::endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZRGB point;
point.x = 0.5 * cosf(pcl::deg2rad(angle));
point.y = sinf(pcl::deg2rad(angle));
point.z = z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 |
static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back(point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int)point_cloud_ptr->points.size();
point_cloud_ptr->height = 1;
pcl::visualization::CloudViewer viewer("test");
viewer.showCloud(point_cloud_ptr);
while (!viewer.wasStopped()) {};
return 0;
}
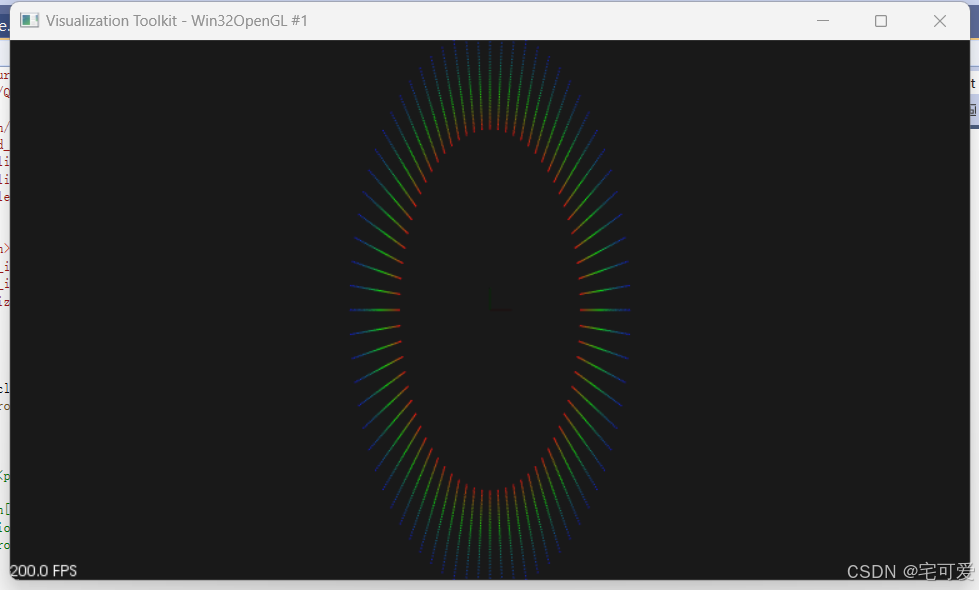
运行成功截图为:

















 1129
1129

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









