







0.引言
NEO-6M/7M GPS模块,具有高灵敏度、低功耗、小型化、高追踪灵敏度,大大扩大了其定位的覆盖面,在普通GPS接收模块不能定位的地方,如狭窄都市天空下、密集的丛林环境,NEO-6M都能高精度定位。模块的高灵敏度、小静态漂移、低功耗及轻巧的体积,适用于车载、手持设备如PDA,车辆监控、手机、摄像机及其他移动定位系统的应用,是GPS产品应用的好选择。内嵌在使用GPS服务的智慧型手机、平板电脑、PND、DVR、可携式装置,测量设备,人员定位管理,测速设备,授时设备,交车跟踪定位、出租车跟踪定位、公司车辆跟踪定位、物流车辆跟踪定位、汽车故障检测、汽车油量检测、汽车物联网、挖掘机定位等等。本文在【Arduino如何进行开发?】基础上,借鉴现有网络资料,阐述Arduino如何连接GPS模块。
1.GPS模块说明
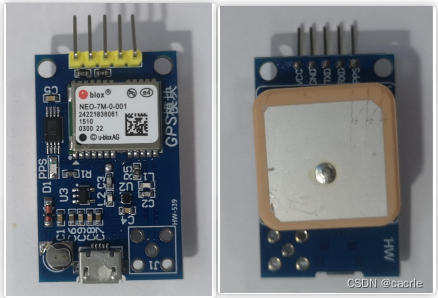
GPS模块情况:
NEO-7M GPS模块。PPS指示灯(即PPS引脚),在默认条件下(没经过程序设置),有2个状态:常亮,表示模块已开始工作,但还未实现定位;闪烁(100ms灭,900ms亮),表示模块已经定位成功。
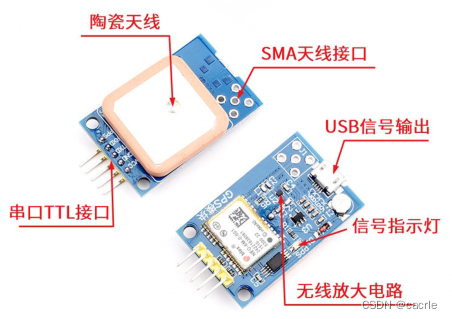
引脚说明:
“VCC”:接Arduino的5V
“GND”:接Arduino的GND
“TXD”:本文接Arduino的D10
“RXD”:本文接Arduino的D11
“PPS”:不接
2.接调试助手测试GPS模块接收数据
本文使用野火多功能调试助手软件,该软件可以从浏览器或者CSDN中搜索下载。

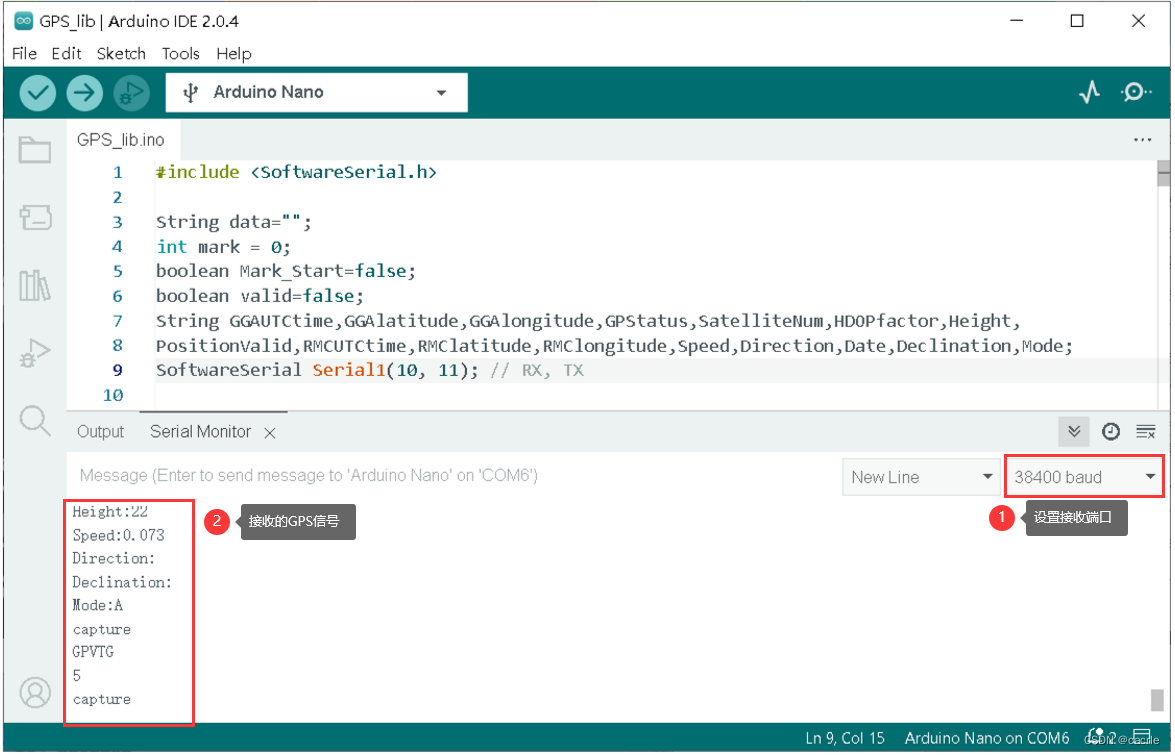
3.代码编写
GPS_lib.ino
#include <SoftwareSerial.h>
String data="";
int mark = 0;
boolean Mark_Start=false;
boolean valid=false;
String GGAUTCtime,GGAlatitude,GGAlongitude,GPStatus,SatelliteNum,HDOPfactor,Height,
PositionValid,RMCUTCtime,RMClatitude,RMClongitude,Speed,Direction,Date,Declination,Mode;
SoftwareSerial Serial1(10, 11); // RX, TX
void setup(){
Serial.begin(38400);
Serial1.begin(9600);
delay(1000);
}
void loop(){
while (Serial1.available()> 0){
if(Mark_Start){
data=reader();
Serial.println(data);
if(data.equals("GPGGA")){
//Serial.println(1);
GGAUTCtime=reader();
GGAlatitude=reader();
GGAlatitude+=reader();
GGAlongitude=reader();
GGAlongitude+=reader();
GPStatus=reader();
SatelliteNum=reader();
HDOPfactor=reader();
Height=reader();
Mark_Start=false;
valid=true;
data="";
}
else if(data.equals("GPGSA")){
Serial.println(2);
Mark_Start=false;
data="";
}
else if(data.equals("GPGSV")){
Serial.println(3);
Mark_Start=false;
data="";
}
else if(data.equals("GPRMC")){
//Serial.println(4);
RMCUTCtime=reader();
PositionValid=reader();
RMClatitude=reader();
RMClatitude+=reader();
RMClongitude=reader();
RMClongitude+=reader();
Speed=reader();
Direction=reader();
Date=reader();
Declination=reader();
Declination+=reader();
Mode=reader();
valid=true;
Mark_Start=false;
data="";
}
else if(data.equals("GPVTG")){
Serial.println(5);
Mark_Start=false;
data="";
}
else{
Serial.println(6);
Mark_Start=false;
data="";
}
}
if(valid){
if(PositionValid=="A"){
Serial.println("Position Valid");
}
else{
Serial.println("Your position is not valid.");
}
Serial.print("Date:");//日期
Serial.println(Date);
Serial.print("UTCtime:");//世界协调时间
Serial.print(RMCUTCtime);
Serial.print(" ");
Serial.println(GGAUTCtime);
Serial.print("Latitude:");//纬度
Serial.print(RMClatitude);
Serial.print(" ");
Serial.println(GGAlatitude);
Serial.print("Longitude:");//经度
Serial.print(RMClongitude);
Serial.print(" ");
Serial.println(GGAlongitude);
Serial.print("GPStatus:");//GP地位
Serial.println(GPStatus);
Serial.print("SatelliteNum:");//卫星数
Serial.println(SatelliteNum);
Serial.print("HDOPfactor:");
Serial.println(HDOPfactor);
Serial.print("Height:");//高度
Serial.println(Height);
Serial.print("Speed:");//速度
Serial.println(Speed);
Serial.print("Direction:");//方向
Serial.println(Direction);
Serial.print("Declination:");//赤纬
Serial.println(Declination);
Serial.print("Mode:");//模式
Serial.println(Mode);
valid=false;
}
if(Serial1.find("$")){
Serial.println("capture");
Mark_Start=true;
}
}
}
String reader(){
String value="";
int temp;
startover:
while (Serial1.available() > 0){
delay(2);
temp=Serial1.read();
if((temp==',')||(temp=='*')){
if(value.length()){
//Serial.println("meaningful message");
return value;
}
else {
//Serial.println("empty");
return "";
}
}
else if(temp=='$'){
//Serial.println("failure");
Mark_Start=false;
}
else{
//Serial.println("add");
value+=char(temp);
}
}
while (!(Serial1.available()>0)){
}
goto startover;
}
4.功能演示
参考资料:
[1] cacrle. Arduino如何进行开发?; 2023-03-28 [accessed 2023-04-15].
[2] liwenkangs. 【Arduino】GPS 定位模块的应用; 2021-11-30 [accessed 2023-04-15].
[3] shasuping. STM32F1 GPS模块NEO-7M; 2019-01-26 [accessed 2023-04-15].
[4] weixin_38691194. NEO-7M GPS模块应用说明-附STM32程序-电路方案 ; 2021-04-21 [accessed 2023-04-15].
[5] songhyong. NEO-7M中文版.pdf; 2020-06-12 [accessed 2023-04-15].
[6] SKCQTGZX. NEO-7M(GPS)模块软硬件开发资料包括PD原理图+AD集成封装+NEO-7M软件工具及设计
参考资料.zip ; 2021-09-06 [accessed 2023-04-15].
[7] Maximilian Gerhardt. ‘Serial1’ was not declared in this scope; 2018-03-06 [accessed 2023-04-15].

















 2166
2166

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









