








弗洛伊德Floyd算法:
其本质是动态规划算法,也是经典的多源最短路径算法
之所以称为经典便是因为该算法非常简短:

该算法的时间复杂度:O(n的三次方)
这个算法短的离谱,以致于我们通常直接将它背了下来当模板使用,而不像学dijkstra那时候一步步理解它是如何贪心的.
那么,为什么floyd算法是这个样子的呢?或者说,为什么这样就能求出所有点到所有点的最短路径?
它的递推公式是:
D[v][w]=min{D[v][w],D[v][k]+D[k][w]}
接下来详细探究Floyd:
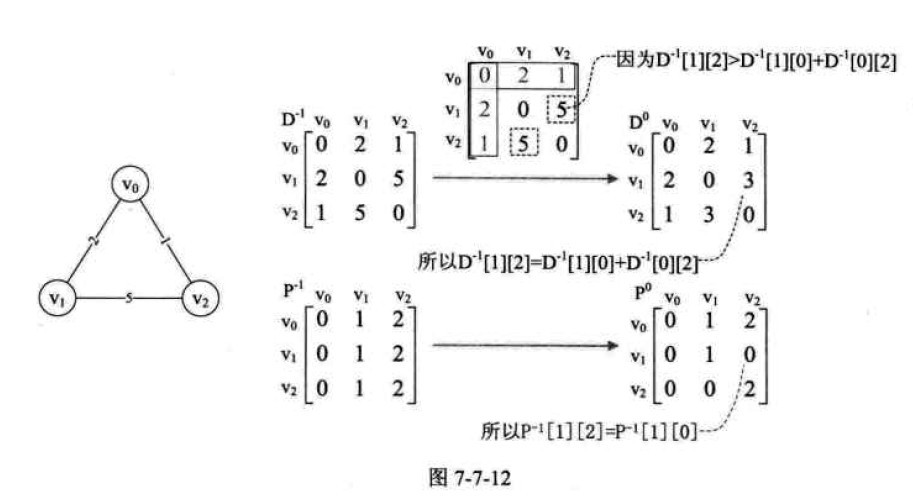
D代表的是顶点到顶点的最短路径权值和的矩阵 初始化D-1
P代表对应顶点的最小路径的前驱矩阵 初始化P-1
然后分析所有经过V0顶点后到达另一顶点的最短路径。V1->V0->V2,有D-1[1][0]+D-1[0][2]=2+1=3,D-1[1][2]表示V1->V2的权值是5,3<5,根据递推公式,D的0次方[1][2]的值更新为3,同样的,D[2][1]=3
P的0次方也有变化,即前驱结点改变了。之后的操作同前面一样。
对于复杂一些的图而言,算法核心内容不变:
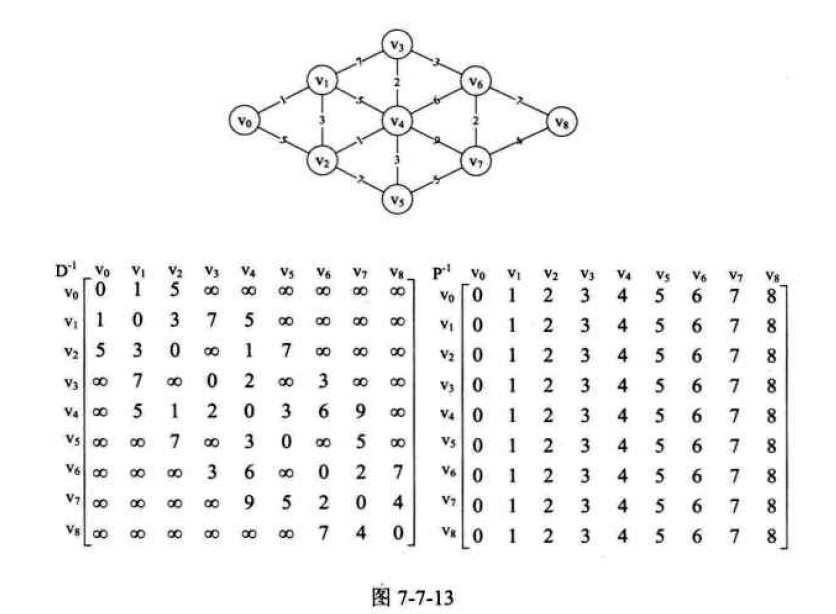
D存储顶点间的权值和,P存储最短路径
代码如下:
typedef int Path[MAX][MAX]
typedef int ShortPath[MAX][MAX]
void ShortPath_Floyd(MGraph G,Path *p,ShortPath *D)
{
int v,w,k;
for(v=0;v<G.numVertexes;v++)
{
for(w=0;w<G.numVertexes;w++)
{
(*D)[v][w]=G.arc[v][w]; //将原邻接矩阵的对应值,即各边的权值存入D数组
(*p)[v][w]=w; //初始化p
}
}
for(k=0;k<G.numVertexes;k++) //k一定要放在最外层循环
{
for(v=0;v<G.numVertexes;v++)
{
for(w=0;w<G.numVertexes;w++)
{
if((*D)[v][w]>(*D)[v][k]+(*D)[k][w]) //递推条件
{
(*D)[v][w]=(*D)[v][k]+(*D)[k][w];
(*p)[v][w]=(*p)[v][k]; //路径设置为经过下标k的顶点,即前驱是k
}
}
}
}
} 特变要注意的是第15行代码:K一定要放在最外层循环!!
证明如下:
有一个致命的结论:
假设i和j之间的最短路径上的结点集里(不包含i,j),编号最大的一个是x.那么在外循环k=x时,d[i][j]肯定得到了最小值.
故K需要放在最外层
假如k在最里层,那么d[i][j]=min(d[i][j],d[i][k]+d[k][j])是一次性执行完.
那么我们就要保证,在这时候,至少存在一个k=x,使得d[i][x]和d[x][j]都是取得了最小值.
然而在这种情况下我们并不能保证,但如果k在最外层就可以保证了.
至于v,w的次序倒是随意,不影响算法实现。















 684
684











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









