








AOV网(Activity On Vertex Network):
在一个表示工程的有向图中,顶点表示活动,弧表示活动之间的优先关系
设G={V,E}是一个具有n个顶点的有向图,V中的顶点序列V1,V2,......,Vn,满足若从顶点Vi到Vj有一条路径,则在顶点序列中顶点Vi必须在Vj之前。这样的顶点序列称为拓扑序列。
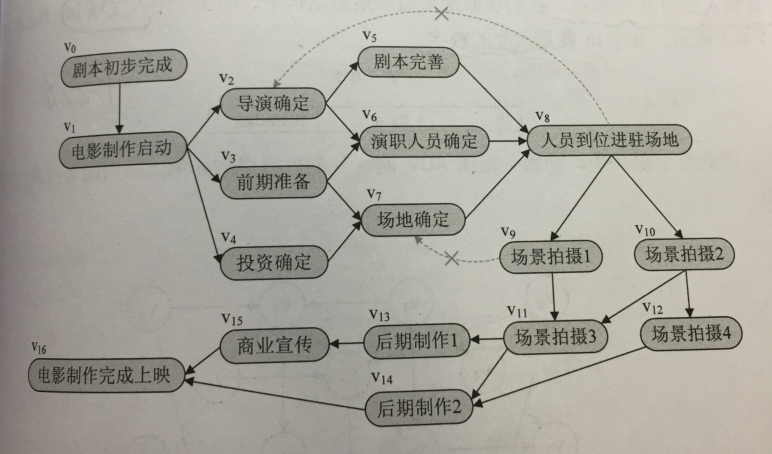
在上图的AOV网中,拓扑序列有多条。
序列V0 V1 V2 V3 V4 V5 V6 V7 V8 V9 V10 V11 V12 V13 V14 V15 V16
序列V0 V1 V4 V3 V2 V7 V6 V5 V8 V10 V9 V12 V11 V14 V13 V15 V16都是拓扑序列
拓扑排序,其实就是对一个有向图构造拓扑序列的过程
拓扑排序算法
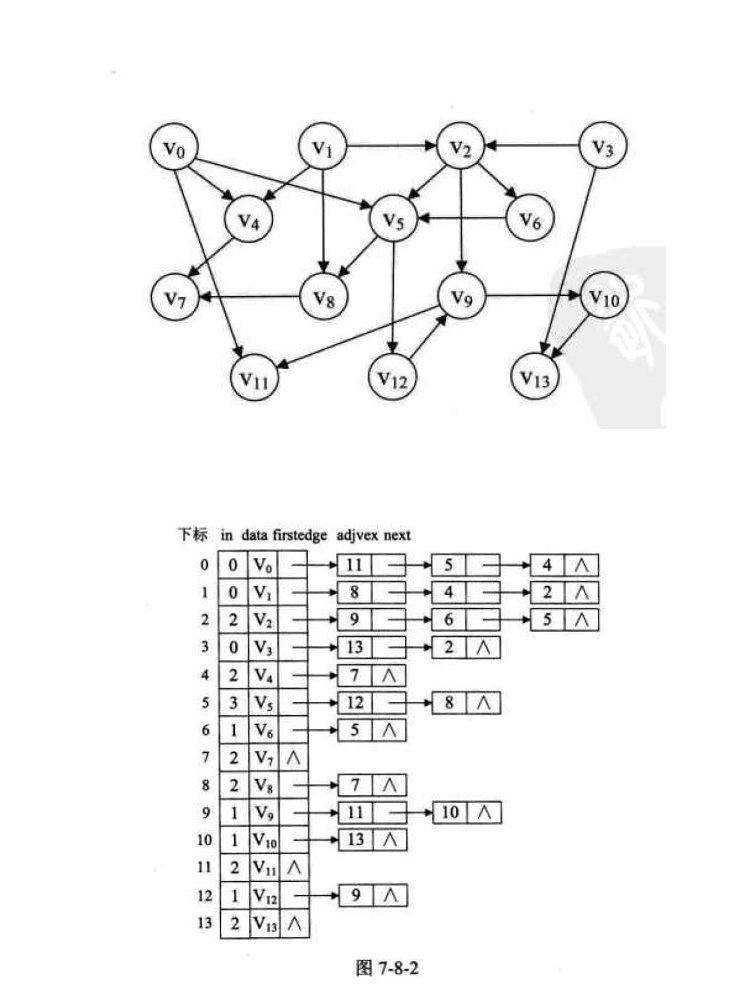
基本思路:从AOV网中选一个入度为0的顶点输出,然后删去该顶点,并删除以此顶点为尾的弧,重复此步骤,直到输出所有顶点或者网中不存在入度为0的顶点
序列V由于需要删除顶点,用邻接表更方便,所以我们要为AOV网建立一个邻接表,要查找入度为0的顶点,所以我们在顶点表结点结构中加一个入度域in,

实例如下:
算法思路个人理解:
1.用栈保存入度为0的顶点,输出栈顶元素并将与其有关的边删除,
2.减少与栈顶元素连线的顶点入度数量
3.把入度为0的顶点也入栈
使用栈结构的目的:
是存储入度为0的顶点,避免每个查找时都要去遍历顶点表有没有入度为0的顶点
顶点表结构代码:
typedef struct EdegeNode //边表结点
{
int adjvex; //邻接点域 ,存储顶点下标
int weight;
struct EdgeNode *next; //指向下一邻接点
}EdgeNode;
typedef struct VertexNode //顶点表结点
{
int in; //入度域
int data;
EdegeNode *firstedge; //边表头指针
}VertexNode,AdjList[MAX];
typedef struct
{
AdjList adjList;
int numVertexes,numEdges;
}graphAdjList,*GraphAdjList; 拓扑排序代码:
Status TopologicalSort(GraphAdjList G)
{
EdgeNode *e;
int i,k,gettop;
int top=0; //栈顶下标
int count=0;
int *stack; //int指针类型的栈
stack=(int *)malloc(G->numVertexes*sizeof(int));
for(i=0;i<G->numVertexes;i++)
if(G->adjList[i].in==0)
{
stack[++top]=i; //相当于stack[top]=i; //将入度为0的顶点入栈
//top++;
}
while(top!=0)
{
gettop=stack[top--];//出栈 相当于 gettop=stack[top];
//top--;
printf("%d->",G->adjList[gettop].data);
count++;
for(e=G->adjList[gettop].firstedge;e;e=e->next) //遍历此顶点边表
{
k=e->adjvex;
if(!(--G->adjList[k].in)) //将k号顶点邻接点的入度减一
//相当于 --G->dajList[k].in; if(!(--G->adjList[k].in));
stack[++top]=k; //若入度为0则入度
//相当于top++; stack[top];
}
if(count<G->numVertexes)
return ERROR; //全部顶点输出了就代表无环路
else
return OK;
}
}注:++top是先+1再运算, 而TOP++是先运算再加1
时间复杂度:
对于一个有n个顶点,e条弧的AOV网而言,第9行扫描顶点表找入度0的顶点时间复杂度O(n),
while循环中每个顶点进一次栈,出一次栈,入度减一的操作共执行了e次,
故整个算法时间复杂度O(n+e)















 641
641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









