






*打开文件句柄,创建.xls文件
open_file (’…/data1.xls’, ‘output’, FileHand)
open_file (’…/data1.xls’, ‘append’, FileHand)
*第一行第一列写入a,并换列
fwrite_string (FileHand, ‘a\t’)
*第一行第二列写入1,并换行
fwrite_string (FileHand, ‘1\n’)
*第二行第一列写入b,并换列
fwrite_string (FileHand, ‘b\t’)
*第二行第二列写入2,并换行
fwrite_string (FileHand, ‘2\n’)
fwrite_string (FileHand, ‘c\t’)
fwrite_string (FileHand, ‘3\n’)
*清除句柄
close_file (FileHand)
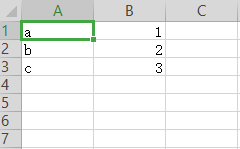
结果图:















03-30
 1349
1349
1349
09-19
411
411
05-31
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









