






Ps菜单:编辑/透视变形
Edit/Perspective Warp
使用不同相机距离和视角拍摄的同一对象的图像会呈现不同的透视扭曲。
透视变形 Perspective Warp命令不仅可以轻松调整图像透视,尤其对于那些包含直线或平面的图像(例如建筑物等),也可用于手动创建透视效果。
提示:
须开启“首选项/性能/使用图形处理器”才能使用此命令。
一般步骤及说明
1、建议先将图层转换为智能对象。
2、建立参考线。
在画面中需要做到“横平竖直”的附近位置添加参考线。
提示:
在后续的操作过程仍可根据实质情况添加参考线。

3、定义平面。
执行Ps菜单:编辑/透视变形,第一步是在版面 Layout模式下定义平面。
可在同一画面中编辑不同的透视,即定义多个平面。
对于常规的镜头校正,建议围绕主体绘制一个四边形平面,以便画面整体变形。
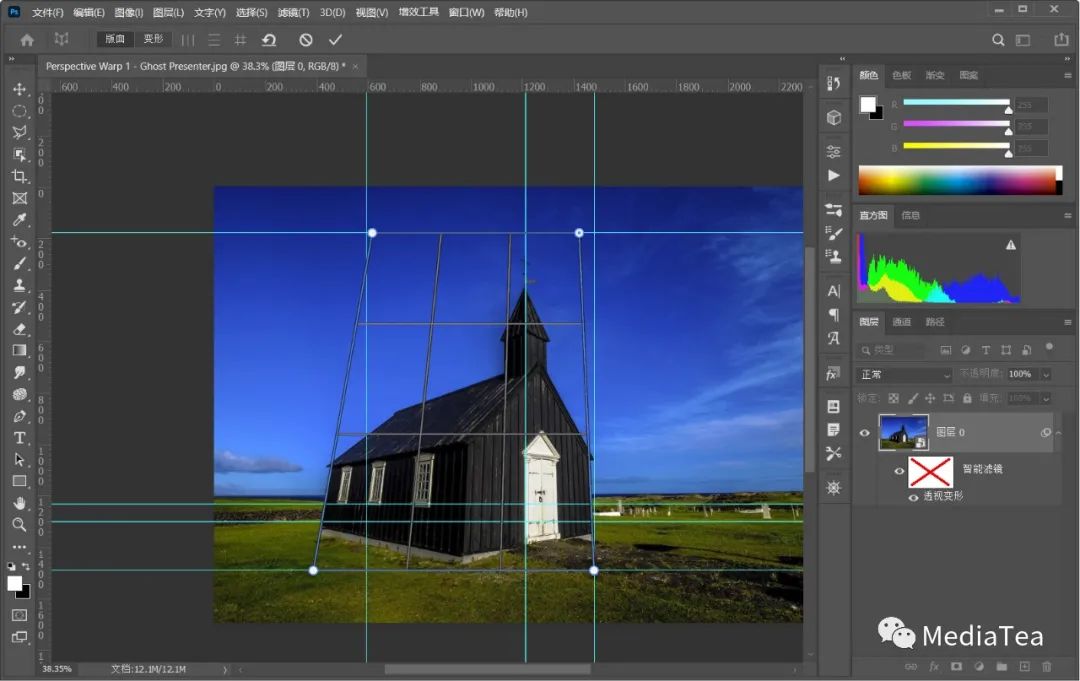
说明:
一般情况下,定义平面时应使得网格线对齐或平行于应该“横平竖直”的位置,以便使用变形模式下的三个自动调整按钮进行调整。
也可以在这一步仅绘制一个或多个平面,后续借助参考线等手动调整。
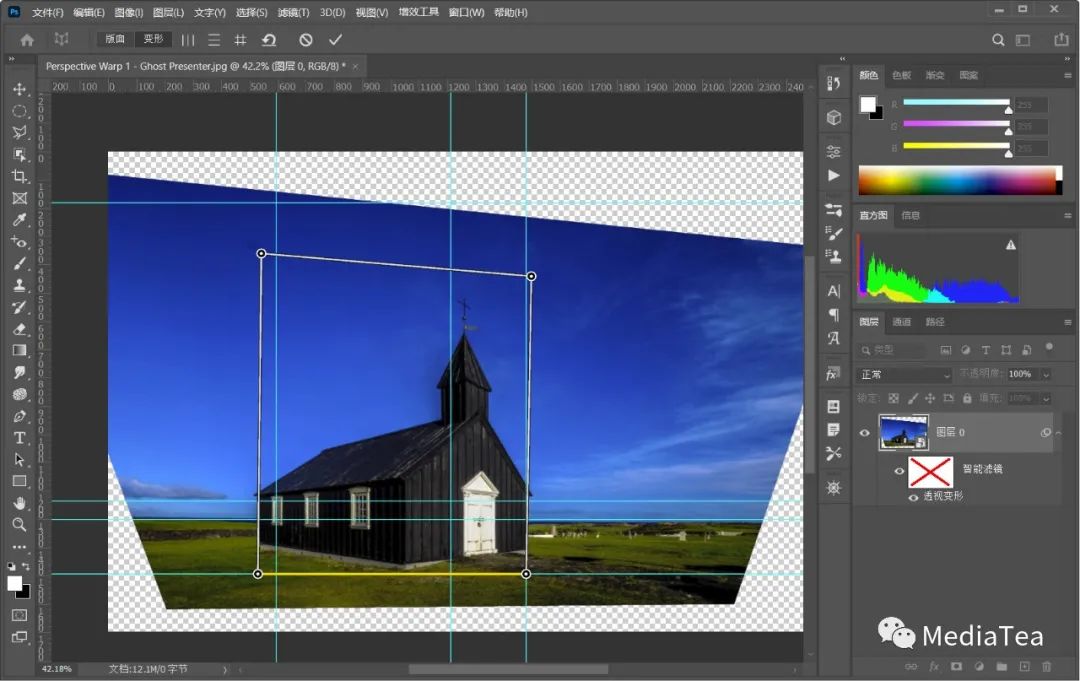
4、操控变形。
在版面模式下,按 Enter 键即可切换到变形 Warp模式。
或者点击工具选项栏上的“变形”按钮。
通过移动四边形的角点(图钉),以达到校正或创建透视的效果。
操作提示:
(1)自动调整按钮。
如果前面已根据画面结构绘制平面,可点击这些按钮进行自动调整。

自动拉直接近垂直的线段
Automatically straighten near vertical lines
自动拉平接近水平的线段
Automatically straighten near horizontal lines
自动水平和垂直变形
Auto warp to horizontal and vertical
(2)水平或垂直约束。
按住 Shift 键单击某条边线,将会使得这条线约束为水平线或垂直线,并显示为黄色。
再次按住 Shift 键并单击该边线可解除约束。
(3)其它技巧。
使用光标键可轻微移动选中的角点(图钉)。
按 H 键可隐藏或显示网格线。
按 L 键可切换到版面模式,按 W 键切换到变形模式。
补充说明
1、使用智能对象的好处是,可以多次对透视变形(智能滤镜)进行调整修改。
2、透视变形完成后,由于整体发生了扭曲变形,通常需要裁剪画面或者进行内容识别填充。

“有钱的捧个钱场,好看的点下在看”

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









