






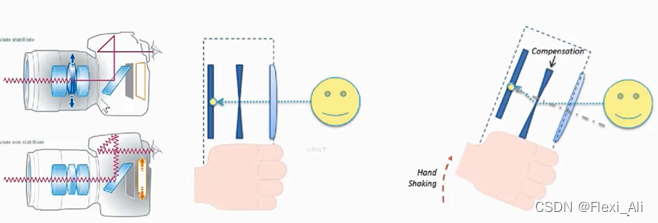
EIS(Electric image stabilizaiton)
说明:电子防抖技术
基础知识
人眼防抖
内耳前庭可检测人体的运动加速度,通过眼球转动或摇头抵抗抖动
防抖分类
光学防抖
镜头移动
Sensor移动
两者一起移动
电子防抖
视频后处理过滤器
位置防抖支架
防抖CCD
光学防抖
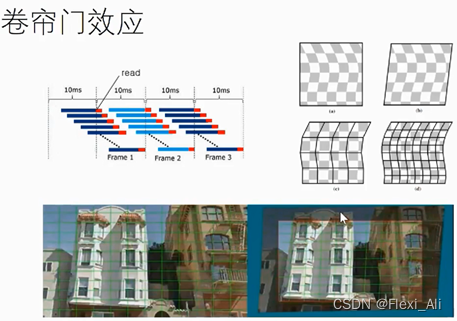
卷帘门效应
由于目前分时曝光的sensor,同一帧图像内的图像存在相位差,如果抖动会导致整体画面的错位,每行的画面存在时间上的延迟导致画面的扭曲
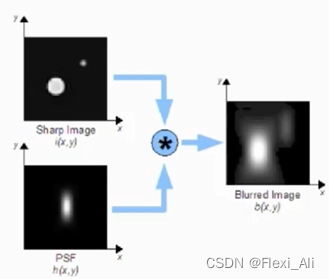
运动模糊
模糊从数学原理上可以理解为是一种图像衰退,psf是一个点的衰退模型,由于抖动导致,psf和原图做卷积就是衰退后的图像。
模糊图像可以理解为,真实图像与模糊点的卷积,真实图像源就是没有抖动的原始图像,PSF是由于镜头抖动导致的衰退模型(点扩散),两者卷积后就是运动模糊后的结果,运动模糊本质上就是图像的衰退。
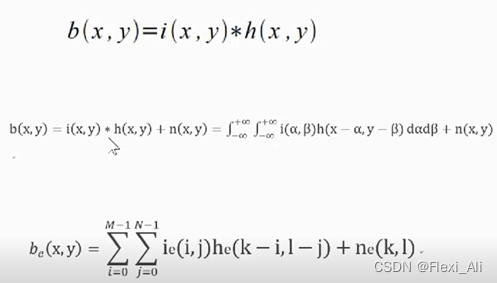
对衰退图像的还原:盲目反卷积(psf未知)
只要知道准确的PSF,就可做反卷积还原原始图像,但是由于噪声的影响,准确PSF很难得到,对反卷积的准确性有影响。
公式中的n是噪声
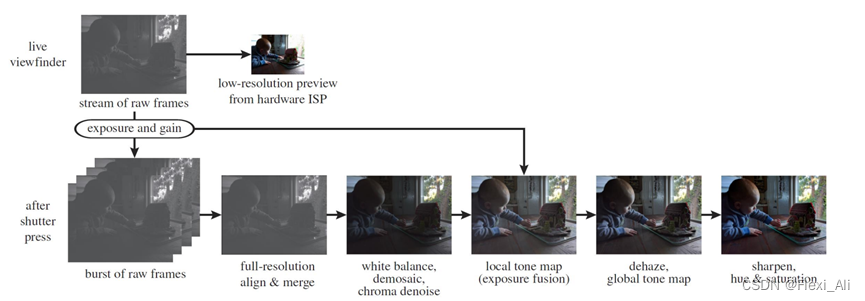
多帧短曝光
视频防抖
视频中找到一个参考点,对连续的帧内抽取参考点的运动轨迹,对轨道进行平滑处理,降低抖动
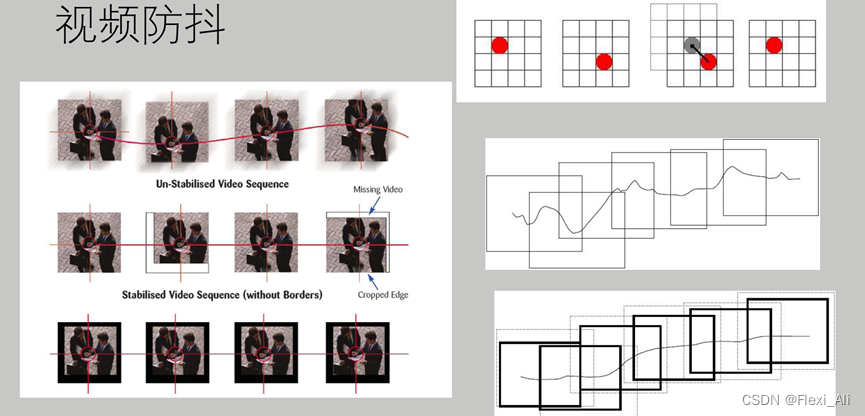
原始视频->运动估计->运动补偿计算->视频补偿->去抖动视频
需要注意的是:防抖不能去除原本的运动状态,防抖并不是使画面静止
运动矢量估计方法
-
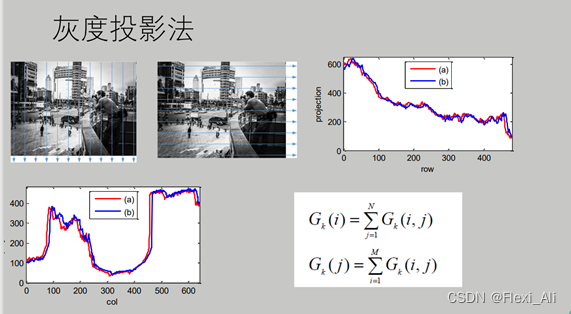
灰度投影
对每帧图像,行方向和列方向切割成若干条,每条计算所有像素的灰度和,可以得到两个行和列方向的曲线。
连续两帧图像非常接近,对连续两帧的曲线的相位差就是两帧的运动向量,也就是可以确定运动方向和运动距离。两帧的曲线的误差最小。
-
块匹配法
找到一个参考点或特征点,判断和参考帧的变化矢量来确定整帧的变化 -
位平面法
将一幅图,在整个灰度区间(0-255),分成若干层级,抓取每层级的像素图,得到每个层级的图,选择辨识度高,纹理高的图作为运动参考 -
光流法
局部运动矢量
对整帧图划分若干块,每个块运动轨迹可能不同。
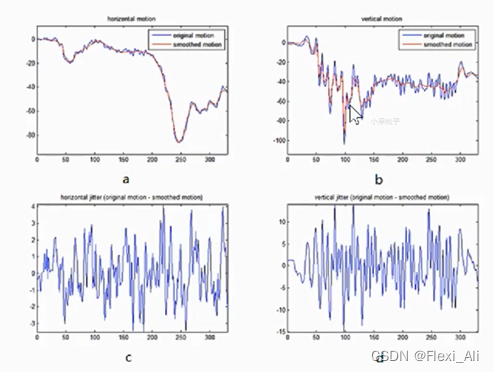
运动和抖动分离
如何区分抖动和移动:抖动是高频,运动方向不明确,移动是低频,有明确运动方向。
Gyro
问题:gyro的状态和哪一帧匹配?
Gyro位置和图像位置存在偏差,不能100%贴合,因此需要校准
可以避免误判,gyro可提供物理的运动状态。
IMU(inertial Measurement Unit)
IMU 惯性测量单元(Inertial Measurement Unit) 是测量物体三轴角速度和加速度的设备。狭义上,一个IMU内在正交的三轴上安装陀螺仪和加速度计,共6个自由度,来测量物体在三维空间的角速度和加速度,这就是我们熟知的"6轴IMU";广义上,IMU可在加速度计和陀螺仪的基础上加入磁力计,就形成了"9轴IMU"。
加速度计:测量载体坐标系统独立三轴的加速度信号
陀螺仪:测量载体相对于导航坐标系的角速度信号
磁力计:用卡尔曼或者互补滤波等算法为用户提供拥有绝对参考的俯仰角、横滚角和航向角
原文链接:https://blog.csdn.net/QLeelq/article/details/112985306
视频稳像算法
通过陀螺仪计算设备在三维轴上的运动状态,加速度,运动方向等
运动趋势变化的计算,基于特征点的运动趋势计算
运动和抖动的分离,是难点
抖动是高频的,运动是低频的。















 1947
1947











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









