







全息成像
引言
广义上的全息投影技术并不单指通过某种特定方 法使物体成像的显像技术(包括一些伪全息投影技 术),而是一类能记录并再现物体真实三维影像的技术 的总称,本篇论文就选取全息投影技术作为研究对象。 当前的全息投影技术主要发展出透射全息投影技术、360度全息投影以及空气投影与交互技术三种,但还是 目前还存在一些问题可以改进,也是未来技术前进的 一个方向。
成像原理
首先,简单描述一下全息照相的原理。以单色光 为例,其波动方程为:
不同单色光相叠加之后,其波动方程为:

其中r为距离。
由公式可知每一列单色光都有相位和振幅(对应 光强)两个信息。而普通照相之记录了光强的信息,相 位信息丢失了,从而普通照相不能体现三维效果。
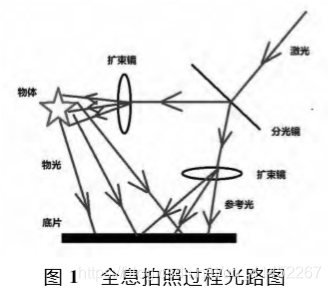
而全息照相则不一样,能够同时记录相位和光强 信息。如图,照相时,为保证物光与参考光的相干性, 会用分光镜将同一激光发生器的光分为两束。一束光 直接照射到底片上,作为参照光;一束光照射到物体上 反射出物光,底片上记录的是物光与参考光的合成。
物光的公式为:

对应参考光的公式为:
由上式可知,相位信息也保存在了底片之上。底 片经过冲洗之后可以使用,成为全息照片。
显像过程
显像过程,就是利用参考光对物光的完全重现。全息再现是以光的衍射理论为基础的,再现原物体的光波还需要用与参考光波相同的光束照射全息图,还原出原物体形状而不需要任何的屏幕。

用k表示透射率,底片的透射率和照相过程中受 照射的光强存在以下关系:

在底片完成后,使用照相时候的相干光源R照射 全息照片,则有 :
即第一级光完全还原了物光,包括相位和振幅在 内的所有信息。即如果在第一级光出射方向观察,就 能看见一个三维立体的像。
集成成像
显示原理
集成成像显示系统一般根据不同的硬件结构、 参数和软件算法实现不同的三维成像效果。该技术 是一种利用微透镜阵列来记录和再现三维图像的真 三维立体显示技术 ,该技术包括记录和再现两个过 程。在早期 Lippmann 提出的集成摄像术中 ,记录 过程和再现过程是利用针孔阵列和感光胶片对实际 场景中的三维物体进行拍摄和重构 [2],如图 1 所示。
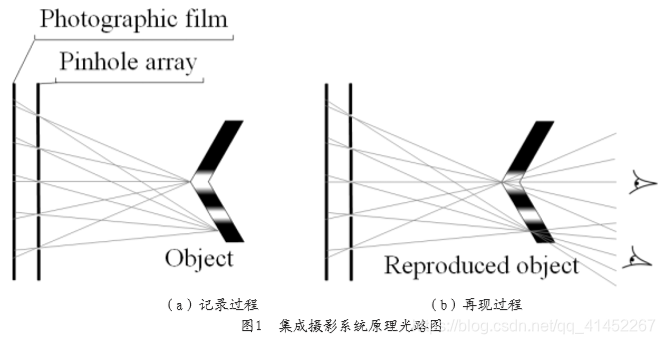
摄像原理
每一个针孔对应的胶片区域能够记录对应视点 传播过来的光束 ,在胶片上形成一组大小相同等间 隔的二维微单元图像阵列 ,从而记录了物体在不同 角度的光源信息。微单元图像的个数和排列方式与 针孔整列相同。再现过程是记录过程的逆过程 ,其 针孔阵列的参数设置与记录过程的针孔阵列相同。 设置一个自然光源来增加重构物体图像的效果 ,光 源发射的光透过微单元透镜阵列后 ,携带这对应视 角的物体视差信息 ,沿着对应视角的方向为该视点 的视角图片提供信息 ,从而重构三维物体。
但是集成摄像术存在几点不足 :第一点 ,由于 针孔阵列上的小孔透光率很低 ,记录过程和再现过 程中的物体光源信息利用率不高、丢失严重 ,从而 导致重构图像的亮度比较暗。第二点 ,传统拍摄记 录过程中 ,感光胶卷的使用、保存不方便 ,显影过 程比较缓慢 ,并要求暗室等复杂条件 ,从而降低了 集成成像技术重构显示的效率。

















 4399
4399

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









