







#include "main.h"
#include "stdarg.h"
#include "stdio.h"
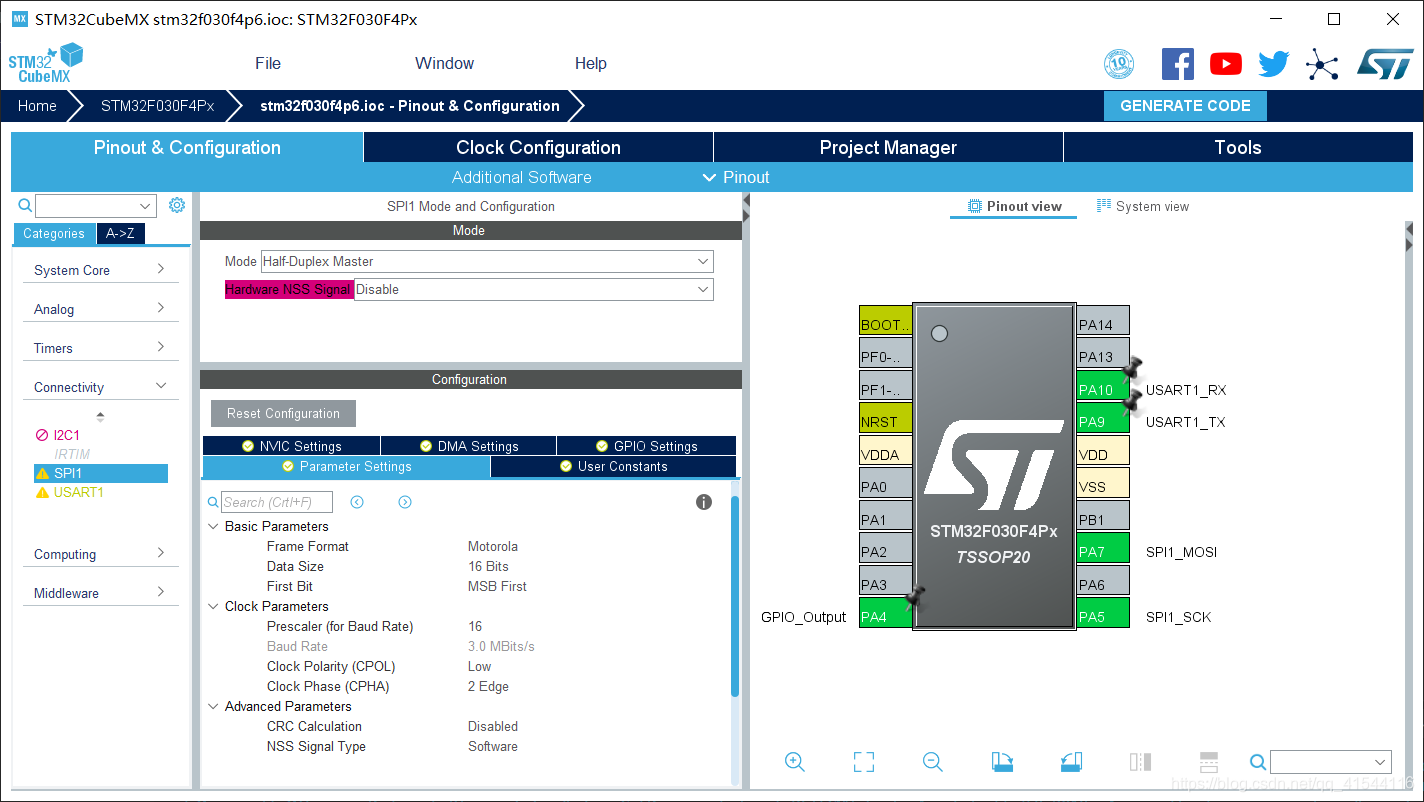
extern SPI_HandleTypeDef hspi1;
extern UART_HandleTypeDef huart1;
void USARTx_Printf (char *fmt_pa, ...);
void tle5012(void)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
uint16_t ang_reg_v = 0x8021, data_v;
HAL_SPI_Transmit(&hspi1, (uint8_t *)(&ang_reg_v), 1, 0xff);
HAL_SPI_Receive(&hspi1, (uint8_t *)(&data_v), 1, 0xff);
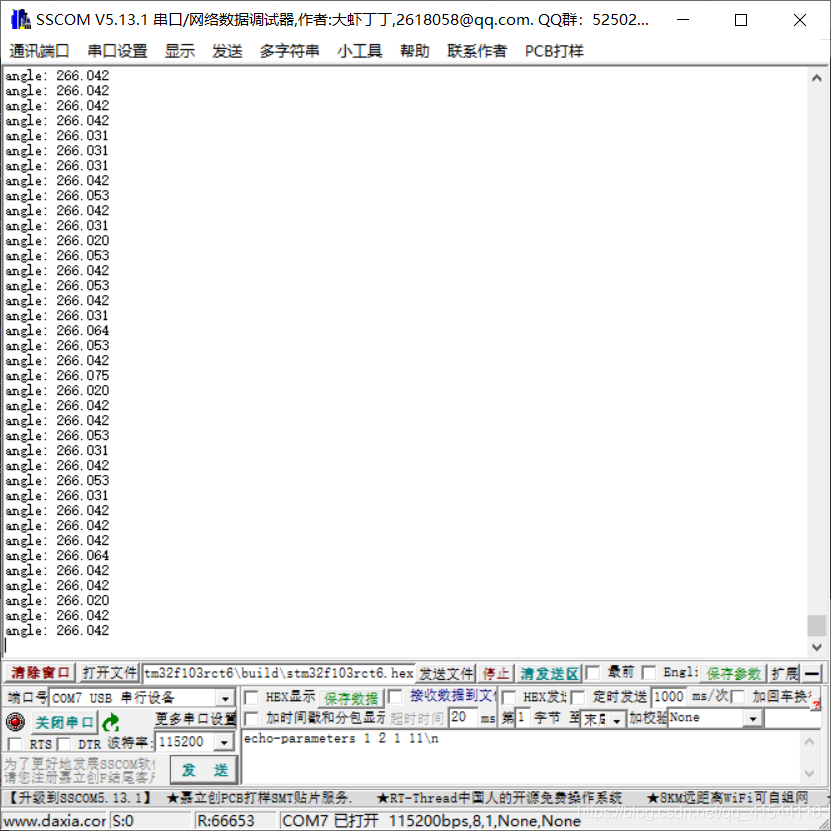
data_v = data_v & 0x7fff;
float ang_v = data_v / (0x7fff / 360.0);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);
USARTx_Printf("angle: %d.%03d\n", (int)ang_v, (int)((ang_v * 1000) - (int)(ang_v)*1000));
HAL_Delay(500);
}
void USARTx_Printf (char *fmt_pa, ...)
{
static char buffer_v[50];
va_list arg_p;//定义指针arg_ptr
va_start(arg_p, fmt_pa);//把arg_ptr定位到fmt开始的的位置
uint8_t len_v = vsnprintf(buffer_v, 50, fmt_pa, arg_p);
va_end(arg_p);
while (HAL_UART_Transmit_IT(&huart1, (uint8_t *)buffer_v, len_v) != HAL_OK)
;
}在main.c的while里调用tle5012函数就行了

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









