







 本文深入探讨计算机控制单元(CU)的功能,分析微操作命令在取指、间址、执行及中断周期中的作用,阐述CU如何协调CPU各部件,实现指令的高效执行。同时,介绍了同步、异步及联合控制方式,以及它们对机器速度的影响。
本文深入探讨计算机控制单元(CU)的功能,分析微操作命令在取指、间址、执行及中断周期中的作用,阐述CU如何协调CPU各部件,实现指令的高效执行。同时,介绍了同步、异步及联合控制方式,以及它们对机器速度的影响。
文章目录
课程笔记导览
计算机组成原理学习笔记(1):概述
计算机组成原理学习笔记(2):发展
计算机组成原理学习笔记(3):总线
计算机组成原理学习笔记(4):存储器
计算机组成原理学习笔记(5):I/O
计算机组成原理学习笔记(6):数字
计算机组成原理学习笔记(7):指令系统
计算机组成原理学习笔记(8):CPU的结构和功能
计算机组成原理学习笔记(9):控制单元的功能
计算机组成原理学习笔记(10):控制单元的设计
附录:英语解释
CPU——Central Processing Unit,中央处理机(器)
PC——Program Counter,程序计数器,存放当前欲执行指令的地址,并可自动计数形成下一条指令地址的计数器
IR——Instruction Register,指令寄存器,存放当前正在执行的指令的寄存器
CU——Control Unit,控制单元(部件),控制器中产生微操作命令序列的部件,为控制器的核心部件
ALU——Arithmetic Logic Unit,算术逻辑运算单元,运算器中完成算术逻辑运算的逻辑部件
ACC——Accumulator,累加器,运算器中运算前存放操作数、运算后存放运算结果的寄存器
MQ——Multiplier-Quotient Register,乘商寄存器,乘法运算时存放乘数、除法时存放商的寄存器
X——此字母没有专指的缩写含义,可以用作任一部件名,在此表示操作数寄存器,即运算器中工作寄存器之一,用来存放操作数
MAR——Memory Address Register,存储器地址寄存器,内存中用来存放欲访问存储单元地址的寄存器
MDR——Memory Data Register,存储器数据缓冲寄存器,主存中用来存放从某单元读出、或写入某存储单元数据的寄存器
I/O——Input/Output equipment,输入/输出设备,为输入设备和输出设备的总称,用于计算机内部和外界信息的转换与传送
MIPS——Million Instruction Per Second,每秒执行百万条指令数,为计算机运算速度指标的一种计量单位
第九章 控制单元的功能
9.1 微操作命令的分析
微操作命令
指令解释过程中由控制单元发出的一些指令,这些指令所完成的动作
完成一条指令分4个工作周期
取指周期
间址周期
执行周期
中断周期
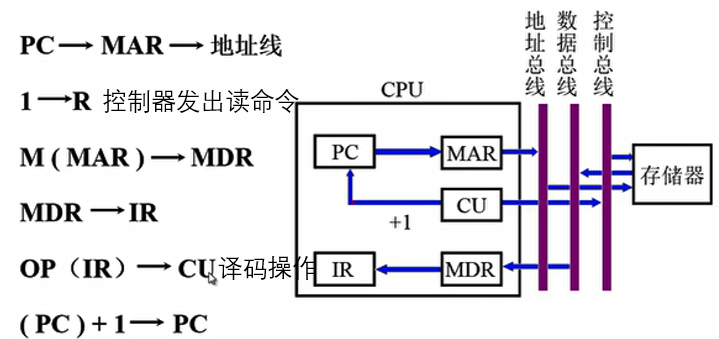
9.1.1 取指周期微操作命令分析
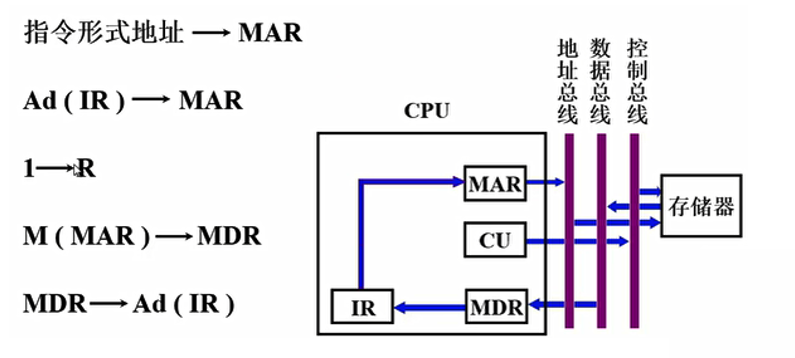
9.1.2 间址周期微操作命令分析
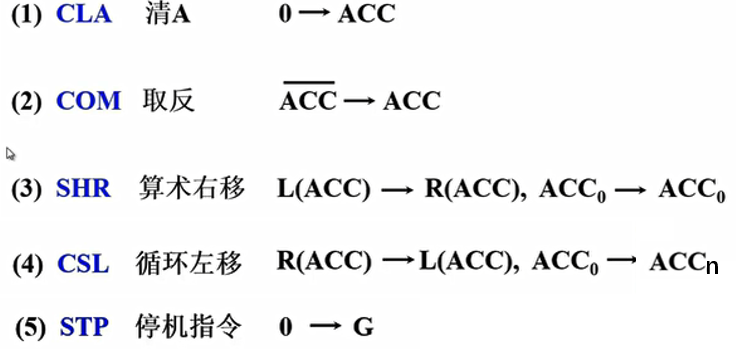
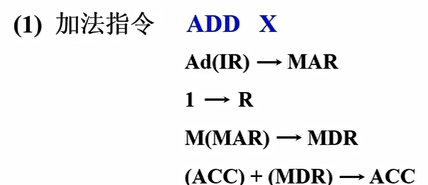
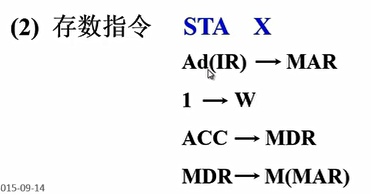
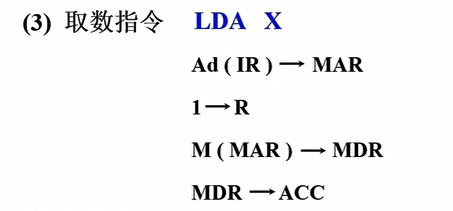
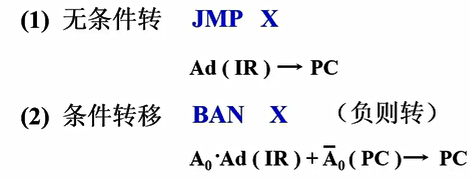
9.1.3 执行周期微操作命令分析
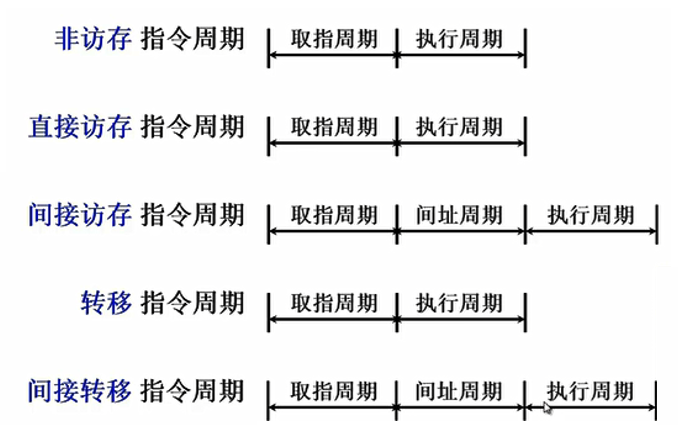
非访存指令
访存指令
转移指令
三类指令的指令周期
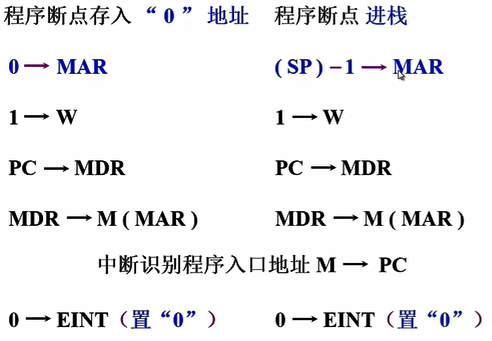
9.1.4 中断周期微操作命令分析
保存断点、形成中断服务程序的入口地址、关闭中断
硬件向量法
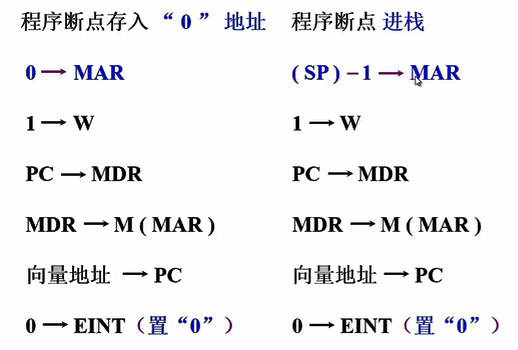
软件查询法
9.2 控制单元的功能
控制单元功能:
发出各种控制命令或者微指令控制整个计算机系统包括CPU内部的各个部件,能够协调稳定连续正确的运行
9.2.1 控制单元的外特性
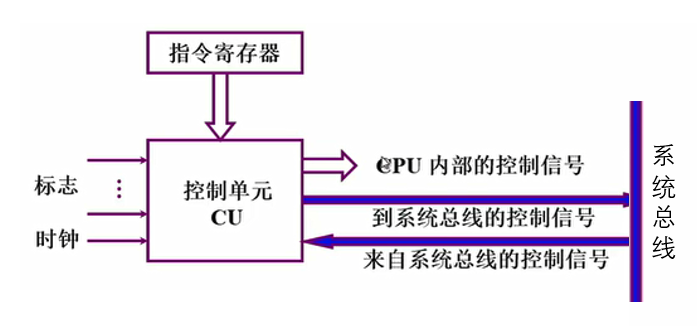
输入信号
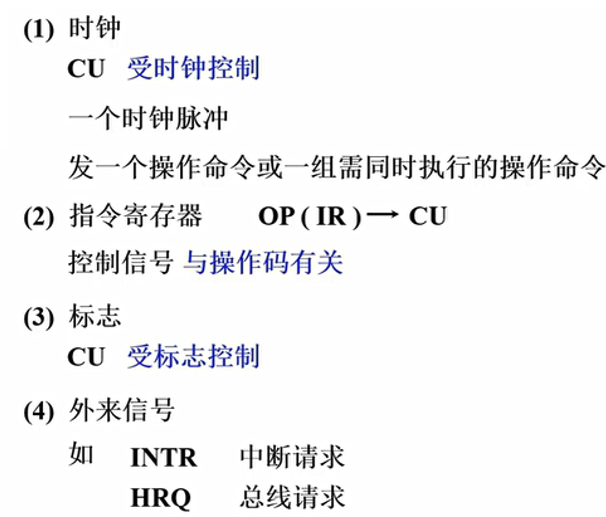
输出信号
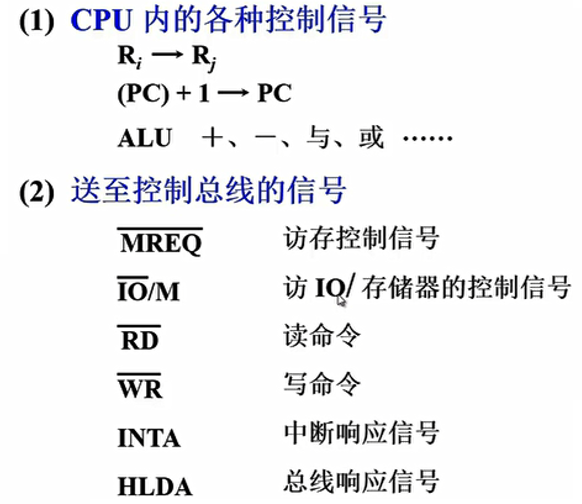
9.2.2 控制信号举例
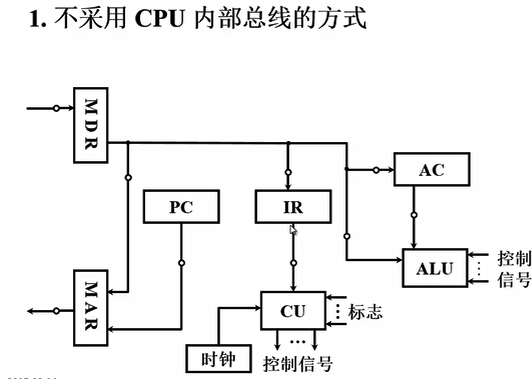
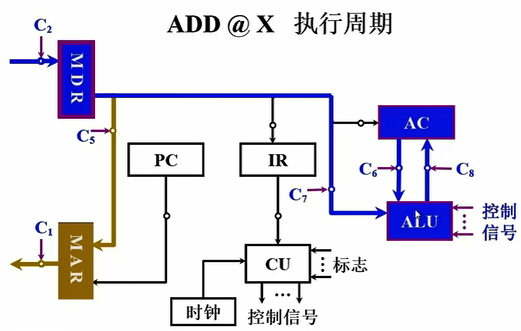
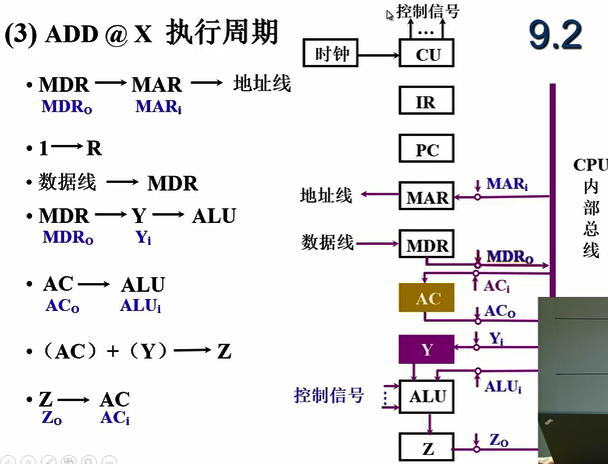
不采用CPU内部总线的方式
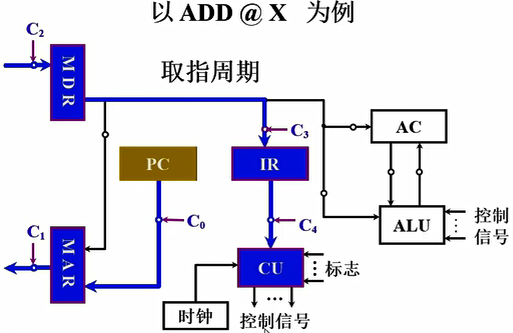
以间接寻址加法指令为例
取指周期
C 0 C_0 C0把PC的内容送给MAR
C 1 C_1 C1把MAR的内容送入内存单元的地址线
中间还应该给控制总线一个读命令
C 2 C_2 C2控制取回来的内容放入MDR
C 3 C_3 C3将渠道的指令送到指令寄存器IR
PC加1
C 4 C_4 C4控制进入CU进行译码
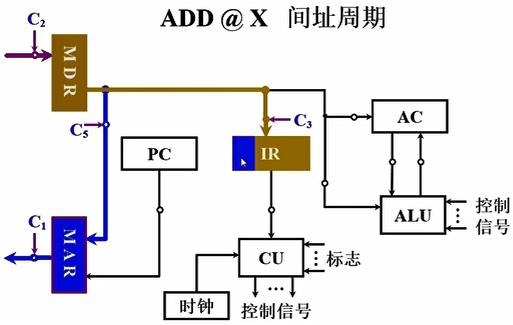
间址周期
IR,MDR 当中都保存了取回的指令
C 5 C_5 C5将取回的指令送入MAR
C 1 C_1 C1将内容送入到地址线,准备取数字的地址
发出读命令
C 2 C_2 C2数据(操作数的地址)送入MDR
C 3 C_3 C3送到指令寄存器的后半部分(地址码部分)表示操作数的地址,前半部分为操作码
执行周期
此时MDR中的存放的数据是操作数的地址
C 5 C_5 C5将地址送到MAR
发出读命令
C 2 C_2 C2操作数传入MDR
控制信号告诉ALU是加法
C 6 C_6 C6, C 7 C_7 C7加数和被加数放入算术逻辑运算单元进行计算
C 8 C_8 C8将结果保存到AC中
采用CPU内部总线的方式
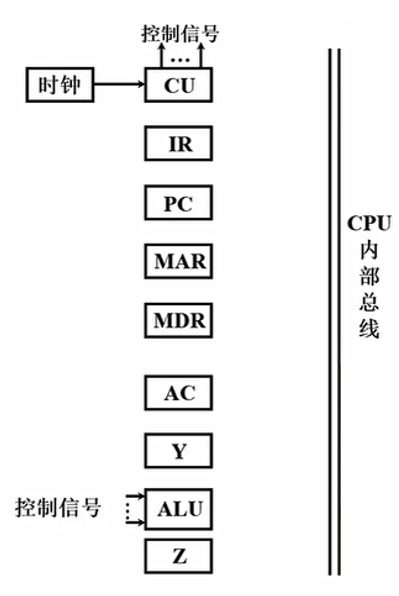
以间接寻址加法指令为例
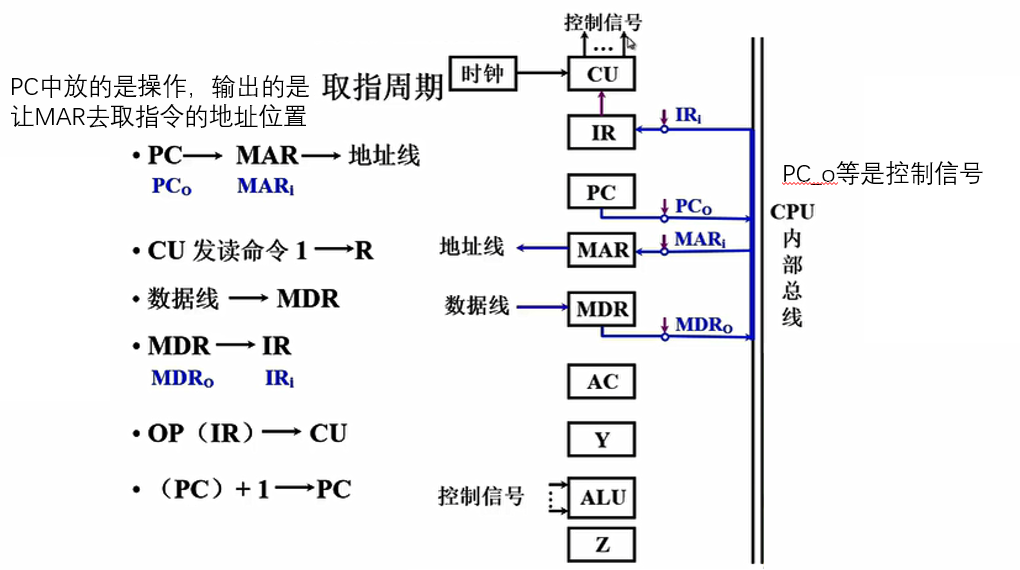
取指周期
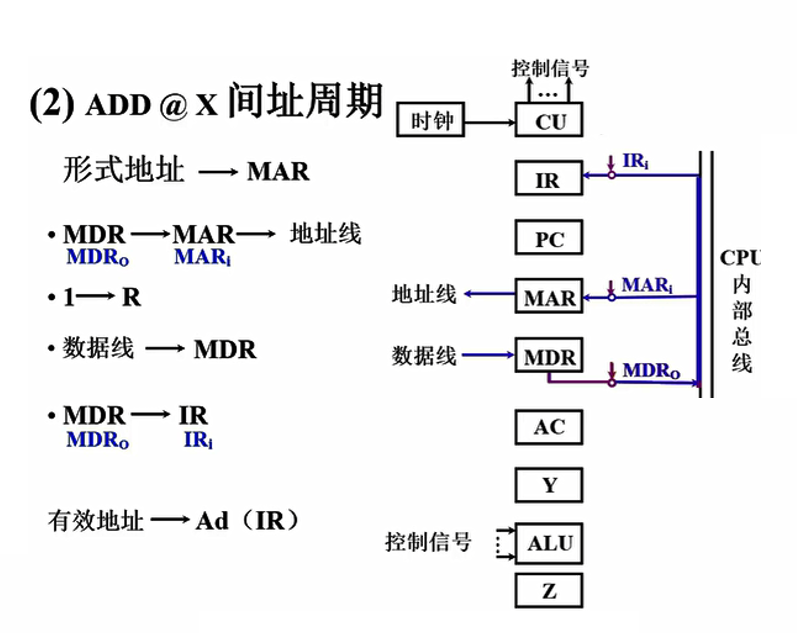
间址周期
执行周期
将参与运算的数据进行取出来并进行运算
9.2.3 多级时序系统
机器周期
机器周期的概念:所有指令执行过程中的一个基准时间
确定机器周期需考虑的因素:每条指令的执行步骤、每一步骤所需的时间
基准时间的确定:以完成最复杂指令功能的时间为准,一般最复杂的就是访存操作,以访问一次存储器的时间为基准
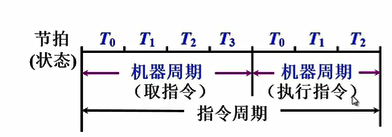
假定指令字长 = 存储字长 取指周期 = 机器周期
时钟周期(节拍、状态)
一个机器周期内可完成若干个微操作(如果可以并行的话可以完成若干个)
每个微操作需一定的时间
将一个机器周期分成若干个时间相等的时间段(节拍、状态、时钟周期)
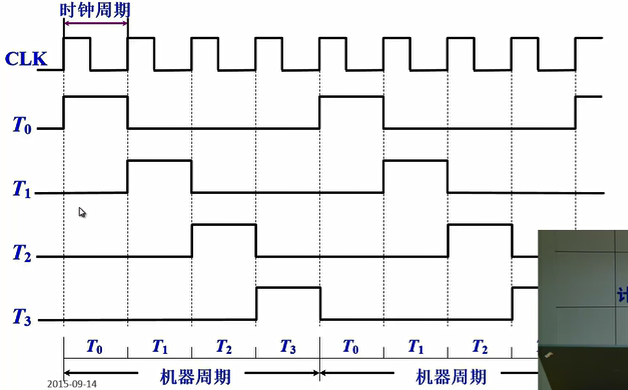
时钟周期CLK
节拍 T 0 , T 1 , T 2 , T 3 T_0,T_1,T_2,T_3 T0,T1,T2,T3用于控制不通的内部构件
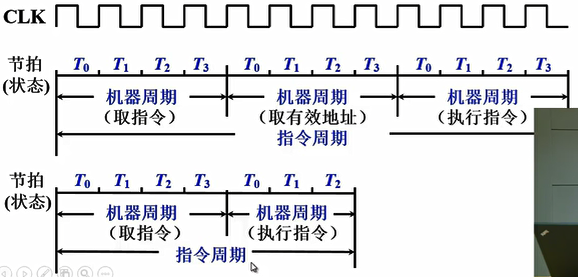
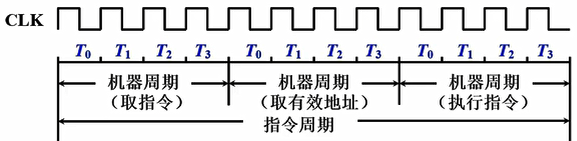
多级时序系统
机器周期、节拍(状态)组成多级时序系统
一个指令周期包含若干个机器周期
一个机器周期包含若干个时钟周期
机器速度与机器主频的关系
机器的主频f越快机器的速度也越快
在机器周期所含时钟周期数相同的前提下,两机平均指令执行速度之比等于两机主频之比
M I P S 1 M I P S 2 = f 1 f 2 \frac{\mathbf{M I P S}_{1}}{\mathbf{M I P S}_{2}}=\frac{f_{1}}{f_{2}} MIPS2MIPS1=f2f1
机器速度不仅与主频有关,还与机器周期中所含时钟周期(主频的倒数)数以及指令周期中所含的机器周期数有关
9.2.4 控制方式
产生不同微操作命令序列所用的时序控制方式
同步控制方式
任一微操作均由统一基准时标的时序信号控制
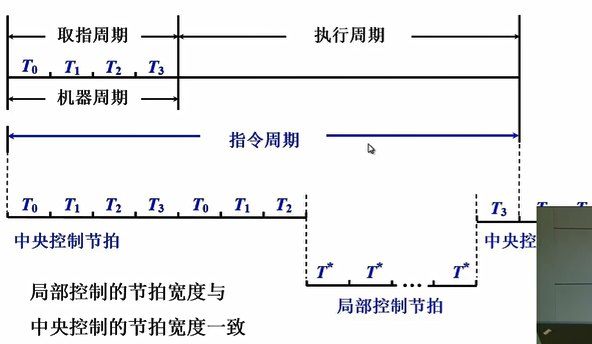
方法一:采用定长的机器周期,以最长的微操作序列和最复杂的微操作作为标准,可能会在部分微操作有一些浪费
方法二:采用不定长的机器周期,机器周期内节拍数不等
方法三:采用中央控制和局部控制相结合的方法

异步控制方式
无基准时标信号
无固定的周期节拍和严格的时钟同步
采用应答方式
联合控制方式
同步与异步相结合
人工控制方式
Reset
连续和单条指令执行转换开关
符合停机开关


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









