







基于MoCo v3框架的大规模视觉Transformer训练策略研究:通过冻结策略提升1-3%性能的稳定性优化方法
- 论文大纲
- 理解
- 观察和假设
- 解法拆解
- 全流程
- 核心模式
- 提问
- 为什么作者会特别关注训练的不稳定性问题?
- 如何定义一个训练过程是"稳定的"?
- 为什么第一层(patch projection)的不稳定会影响整个网络?
- 冻结第一层能解决问题,这说明了什么本质问题?
- 为什么自监督训练比监督训练更容易出现不稳定?
- 大批量训练为什么会加剧不稳定性?
- 相比CNN,Transformer架构的不稳定性有什么特殊之处?
- 作者提出的解决方案是否足够优雅?还有其他可能的方案吗?
- 这个发现对未来更大规模模型的训练有什么启示?
- 为什么自监督大模型反而表现更好,这违反了直觉吗?
- 不同框架(MoCo/SimCLR/BYOL)对这个问题的敏感程度为什么不同?
- 如何从理论角度解释这种不稳定性现象?
- patch projection层是不稳定性的主要来源,但您只提供了梯度传播的观察数据,没有理论证明。如何确保这不是一个表象而是根本原因?
- 实验显示冻结第一层能提升性能,但这是否意味着我们完全不需要训练这一层?这似乎与深度学习"端到端训练"的理念相悖,您如何解释这个矛盾?
- 您在实验中使用了固定的随机初始化patch projection,不同的随机初始化会导致显著的性能差异吗?如果会,这个方法的可复现性如何保证?
- 文中提到使用BatchNorm替代LayerNorm可以提升性能,但您没有深入探讨为什么。这种改进是否与patch projection的冻结有关联?
- 大模型(如ViT-H)在自监督学习中表现更好,而在监督学习中则相反。您认为这种差异的本质原因是什么?是否与预训练任务的复杂性有关?
- 对于"部分失败"现象(1-3%性能下降),您是如何确定这确实是训练不稳定导致的,而不是模型本身的性能上限?
- 您的方法在不同自监督框架中都有效,但效果差异显著(从0.6%到1.7%)。这种差异是否说明存在更深层的原理我们还未理解?
- 移除位置嵌入只导致很小的性能下降,这是否意味着当前的自监督训练范式没有充分利用空间信息?如何改进?
- 您的实验主要集中在ImageNet数据集上,这些发现在其他领域(如医学图像、遥感图像)是否同样适用?如何验证其普适性?
- 论文提到这种不稳定性在卷积网络中罕见。那么,这是否意味着Transformer架构在视觉任务上存在某些根本性的缺陷?
论文:An Empirical Study of Training Self-Supervised Vision Transformers
代码:https://github.com/facebookresearch/moco-v3
论文大纲
├── 1 研究背景【研究动机】
│ ├── NLP的自监督预训练革命性进展【背景铺垫】
│ └── 视觉与NLP的差异【问题阐述】
│ ├── 学习范式差异:视觉用Siamese网络、NLP用masked自编码【方法对比】
│ └── 架构差异:视觉用CNN、NLP用Transformer【架构对比】
│
├── 2 研究目标【研究核心】
│ ├── 研究自监督Vision Transformer训练【主要任务】
│ └── 探索基础组件影响【具体内容】
│ ├── 批量大小【训练参数】
│ ├── 学习率【训练参数】
│ └── 优化器【训练参数】
│
├── 3 关键发现【研究发现】
│ ├── 不稳定性问题【主要问题】
│ │ ├── 1-3%精度下降【具体表现】
│ │ └── 隐藏性失败【问题特点】
│ │
│ └── 改进方案【解决方案】
│ ├── 冻结patch投影层【具体方法】
│ └── 提高训练稳定性【改进效果】
│
└── 4 实验结果【研究成果】
├── 对比学习框架效果好【方法验证】
│ ├── MoCo v3性能最佳【具体效果】
│ └── 优于masked自编码【比较结果】
│
└── 模型规模扩展性强【规模效果】
├── 自监督训练随规模提升【正向关系】
└── 优于监督预训练效果【比较优势】
理解
- 背景和问题:
- 大类问题:缩小视觉与自然语言处理在预训练方法上的差距
- 具体问题:
- 视觉用Siamese网络,而NLP用masked自编码
- 视觉用CNN,而NLP用Transformer架构
- Vision Transformer的训练方法尚未成熟,特别是在自监督场景下
- 概念性质:
- 核心性质:训练不稳定性
- 导致原因:
- 大批量训练时梯度变化剧烈
- 第一层(patch projection)对不稳定性特别敏感
- 优化器和学习率的选择影响显著
- 对比案例:
- 正例:使用frozen patch projection后,ViT-B模型在ImageNet上的准确率提升1.7%
- 反例:不使用frozen patch projection时,大批量训练(batch size=6144)导致性能下降2.9%
- 类比理解:
Vision Transformer的训练就像在搭积木塔:
- 第一层(patch projection)相当于地基
- 如果地基不稳,上面的积木(其他层)再稳也容易倒塌
- 冻结patch projection就像把地基固定住
-
概念介绍与总结:
这是一项研究Vision Transformer自监督训练方法的实证研究,核心发现是训练过程中的不稳定性问题,通过冻结patch projection layer可以显著提升模型性能。 -
概念重组:
“Vision Transformer"可以理解为"视觉转换器”,它把视觉信息转换成计算机可以理解的表示形式。 -
与上下文关联:
本研究通过实验发现了ViT训练中的关键问题(不稳定性),并提出了简单有效的解决方案,为后续研究提供了重要参考。 -
规律发现:
主要矛盾:训练稳定性问题
次要矛盾:
- 批量大小选择
- 学习率调整
- 优化器选择
- 数据增强策略
- 功能分析:
- 表面需求:提高Vision Transformer的训练性能
- 本质需求:建立稳定可靠的视觉表示学习方法
- 实现方式:通过冻结patch projection来提升训练稳定性
- 量化指标:线性探测准确率提升1-3个百分点
- 来龙去脉:
- 起因:视觉领域想要借鉴NLP的成功经验,将Transformer引入视觉任务
- 发展:发现直接应用存在训练不稳定问题
- 转折:提出冻结patch projection的简单解决方案
- 结果:成功提升了模型性能,特别是在大规模模型上效果更显著
1. 确认目标
主要目标:如何提升Vision Transformer在自监督学习中的训练效果?
2. 分析过程
层层分解问题:
-
为什么ViT训练效果不理想?
- 训练过程不稳定
- 梯度变化剧烈
- 优化难度大
-
训练不稳定的具体表现是什么?
- 精度下降1-3%
- 训练曲线出现明显波动
- 在大批量训练时性能显著降低
-
不稳定的根源在哪里?
- patch projection层梯度变化最为剧烈
- 第一层的不稳定会影响后续所有层
- 优化器和学习率的选择都会加剧这个问题
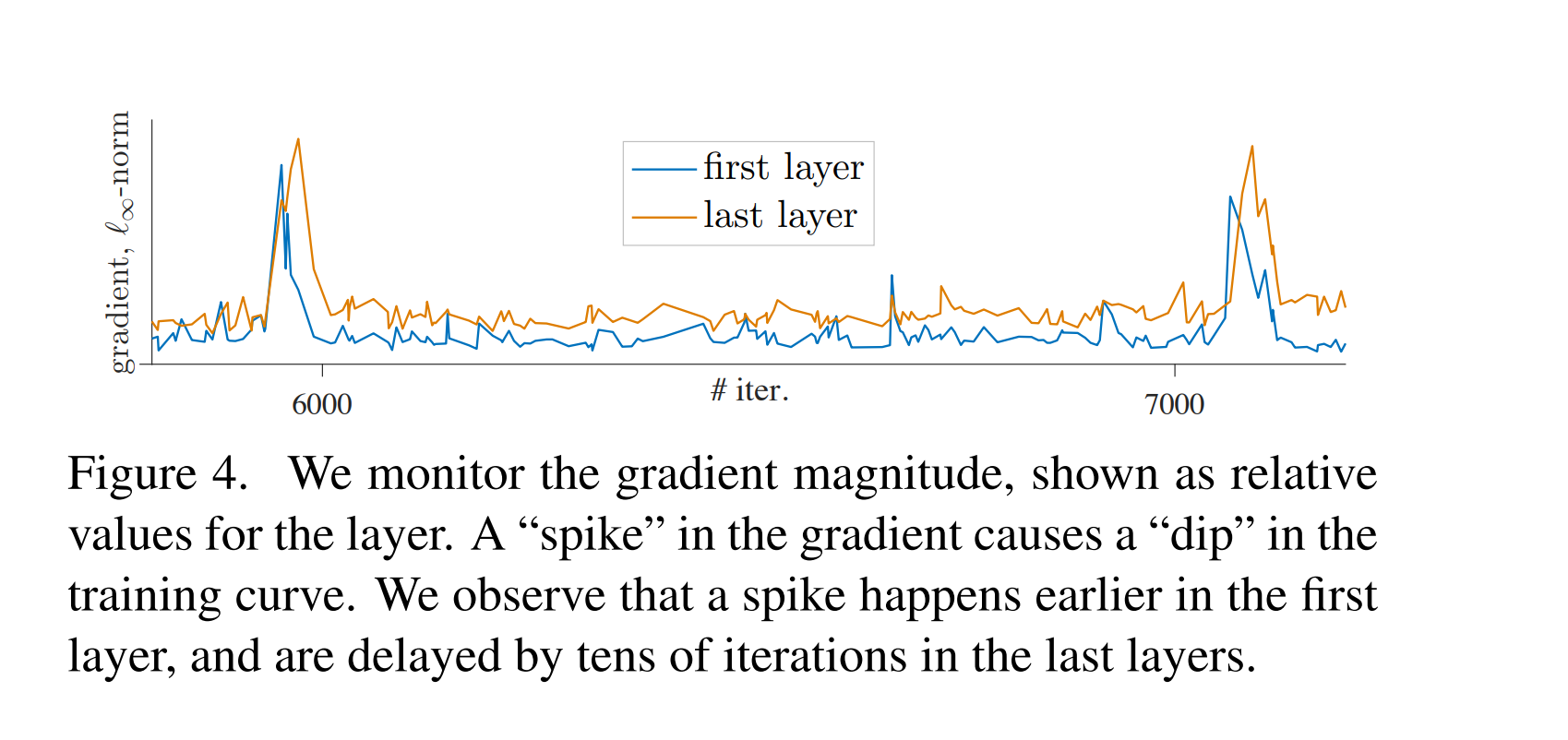
展示了不同层的梯度变化
特别关注第一层和最后一层
横轴:训练迭代次数
纵轴:梯度范数
关键发现:第一层梯度波动最早出现并影响后续层
3. 实现步骤
-
基础配置优化:
- 使用AdamW优化器
- 采用cosine学习率衰减
- 设置合适的batch size
-
关键改进:冻结patch projection
- 在训练开始时固定第一层参数
- 保持随机初始化的投影矩阵不变
- 只训练后续Transformer层
-
验证与调优:
- 在不同规模模型上验证
- 与其他自监督框架对比
- 迁移学习测试
4. 效果展示
目标:提升训练稳定性和模型性能
过程:通过冻结patch projection层
问题:训练不稳定导致性能下降
方法:固定第一层参数
结果:
- ViT-B/16准确率提升1.7%(从71.7%到73.4%)
- 大模型效果更显著
- 超过了之前的SOTA结果
5. 领域金手指
发现的金手指是"冻结第一层"策略,这个简单的技巧在多个场景都证明有效:
- MoCo v3框架:提升1.7%
- SimCLR框架:提升0.8%
- BYOL框架:提升1.3%
- SwAV框架:提升0.6%
这个金手指具有普适性:
- 简单易实现
- 不增加计算成本
- 适用于各种自监督框架
- 对大模型效果更好
- 能解决训练不稳定的普遍问题
通过这个分析框架,我们可以清晰地看到论文是如何一步步解决Vision Transformer训练问题的,以及提出的解决方案的有效性和普适性。
观察和假设
1. 关键观察
不寻常的现象:
-
训练曲线的突然"下降"
- 其他层保持正常时,第一层出现梯度尖峰
- 这种下降出现得更频繁,但不会导致完全失败
-
批量大小的影响异常
- 从1024到2048时性能提升
- 从2048到4096时开始不稳定
- 达到6144时性能显著下降
-
模型规模与性能的反常关系
- 监督学习中,大模型性能反而下降
- 自监督学习中,大模型持续提升
2. 变量分析
比较所有实验中的变与不变:
-
不变的因素:
- 模型架构
- 训练框架
- 数据集
- 评估方法
-
变化的因素:
- 第一层的可训练性
- 批量大小
- 优化器选择
- 学习率
3. 假设提出
基于观察提出三个核心假设:
-
第一层假设:
- 现象:第一层梯度波动最大
- 假设:patch projection层是不稳定性的主要来源
- 理由:第一层的梯度变化会影响后续所有层
-
批量训练假设:
- 现象:大批量导致性能下降
- 假设:梯度累积放大了不稳定性
- 理由:更大的批量会累积更多的不稳定梯度
-
模型规模假设:
- 现象:自监督大模型表现更好
- 假设:自监督学习不容易过拟合
- 理由:对比学习提供了更好的正则化效果
4. 验证过程
-
第一层假设验证:
- 方法:冻结patch projection层
- 结果:稳定性显著提升
- 结论:假设成立
-
批量训练假设验证:
- 方法:不同批量大小实验
- 结果:确实存在临界点
- 结论:假设部分成立
-
模型规模假设验证:
- 方法:扩展到更大模型
- 结果:性能持续提升
- 结论:假设成立
5. 发现总结
通过观察-假设-验证的科学方法,研究发现:
-
关键发现:
- patch projection层是不稳定性的根源
- 简单的冻结策略就能解决问题
- 自监督学习更适合大规模模型
-
普适性规律:
- 第一层的稳定性对整体训练至关重要
- 自监督学习有更好的可扩展性
- 简单解决方案往往更有效
这种系统的观察和假设方法帮助研究者找到了问题的核心,并提出了简单而有效的解决方案。通过严谨的验证过程,确保了结论的可靠性。
解法拆解
1. 逻辑关系拆解
技术:自监督Vision Transformer = Transformer主干网络 + 自监督训练策略 + 稳定性优化方法
子解法拆解:
├── 1. 模型架构优化【因为结构不稳定性】
│ ├── 冻结patch projection层
│ └── 使用BatchNorm替代LayerNorm
│ 之所以用这个子解法,是因为第一层梯度变化剧烈
│
├── 2. 训练策略优化【因为优化困难】
│ ├── 动量编码器更新
│ ├── 对比学习损失
│ └── 预测头设计
│ 之所以用这个子解法,是因为需要学习鲁棒的特征表示
│
└── 3. 参数配置优化【因为规模扩展性】
├── 批量大小选择
├── 学习率调整
└── 优化器设计
之所以用这个子解法,是因为大规模训练时不稳定性更显著
例子:不同框架中应用冻结策略的效果:
- MoCo v3:准确率提升1.7%
- SimCLR:准确率提升0.8%
- BYOL:准确率提升1.3%
2. 逻辑链分析
呈现为决策树形式的网络结构:
└── 训练稳定性
├── 是否使用大批量
│ ├── 是 → 需要冻结第一层
│ └── 否 → 常规训练
│
├── 模型规模
│ ├── 小型 → 优化器不敏感
│ └── 大型 → 需要特别优化
│
└── 框架选择
├── MoCo类 → 需要动量编码器
└── SimCLR类 → 需要大批量
3. 隐性方法分析
发现的隐性关键方法:
-
梯度传播延迟现象
- 第一层梯度变化先发生
- 后续层延迟几十个迭代才受影响
-
部分失败机制
- 训练不会完全崩溃
- 而是降低1-3%性能
- 这种细微降低容易被忽视
4. 隐性特征分析
发现的隐性特征:
-
架构敏感性
- 不是所有层都同等重要
- 第一层对稳定性影响最大
-
规模依赖性
- 大模型反而表现更好
- 与监督学习相反的趋势
5. 方法局限性
-
计算资源要求
- 需要大批量训练
- 需要较长预热期
-
适用范围限制
- 主要验证在图像分类任务
- 其他视觉任务效果未知
-
可解释性不足
- 为什么冻结第一层有效?
- 理论基础需要进一步研究
-
框架依赖
- 在不同框架中效果不一
- 可能需要框架特定的调整
-
扩展性问题
- 更大规模模型的表现未知
- 计算成本随规模急剧增加
全流程
- 全流程优化分析:
多题一解情况:
- 共用特征:训练不稳定性
- 共用解法:冻结patch projection层
- 适用场景:
- MoCo v3
- SimCLR
- BYOL
- SwAV
一题多解情况:
- 训练稳定性问题:
- 特征:梯度波动 → 解法:冻结第一层
- 特征:批量敏感 → 解法:优化器选择
- 特征:学习率敏感 → 解法:warmup策略
优化过程:
原始方案 → 优化方案
└── 完全可训练 → 部分参数冻结
├── LayerNorm → BatchNorm
├── 固定学习率 → cosine衰减
└── 小批量训练 → 大批量训练
- 输入输出分析:
医疗场景类比:
输入:医学图像数据(如X光片)
↓
预处理:
- 图像分块(类似医生关注不同区域)
- 特征提取(类似发现异常特征)
↓
处理过程:
- 自监督学习(类似医生从大量未标注图像中学习)
- 特征关联(类似综合多个症状特征)
↓
输出:
- 预训练模型(类似医生的经验积累)
- 下游任务性能(类似具体疾病诊断)
例子:胸片诊断系统
- 输入:胸部X光片
- 处理:自监督预训练+微调
- 输出:肺炎、结核等疾病的诊断结果
核心模式
核心规律提炼
- 不稳定性传播链:
梯度尖峰(第一层) → 延迟传播 → 性能下降(1-3%) → 隐藏失败
- 批量-性能关系:
小批量(1k-2k):稳定↑ 性能↑
中批量(2k-4k):稳定↓ 性能→
大批量(4k+): 稳定↓↓ 性能↓
- 监督vs自监督规律:
监督学习:规模↑ = 性能↓
自监督学习:规模↑ = 性能↑
重复模式识别
- 框架共性:
所有框架(MoCo/SimCLR/BYOL/SwAV)都表现出:
- 第一层不稳定性
- 对冻结策略正响应
- 大批量训练困难
- 优化模式:
问题发现 → 局部冻结 → 稳定性提升 → 性能改善
- 架构设计:
patch投影 → Transformer编码 → 特征表示
关键发现
通过压缩分析发现三个本质规律:
-
最小干预原则:
- 只冻结一层就能解决问题
- 不需要复杂的架构改动
-
稳定性传递效应:
- 第一层的稳定性决定整体表现
- 影响呈现延迟传播特性
-
规模扩展法则:
- 自监督学习具有更好的规模扩展性
- 简单策略在大模型上更有效
这种压缩分析帮助我们发现:所有现象都可以追溯到"第一层稳定性"这个核心因素,它是贯穿整个研究的关键规律。论文的主要贡献实际上就是发现并利用了这个简单而普适的规律。
补充:
- 输入复杂度:O(batch_size × image_size × channels)
- 输出维度:O(model_dimension)
- 计算复杂度:O(sequence_length²)
这个压缩后的表述保留了论文的核心信息,同时揭示了更深层的规律。
提问
为什么作者会特别关注训练的不稳定性问题?
根据论文数据,Vision Transformer在扩展到大规模时表现出明显的不稳定性,这直接影响了模型的实用价值。
特别是在自监督训练中,这个问题更为严重,因为现有的训练方法主要是为CNN设计的。
如何定义一个训练过程是"稳定的"?
在论文中,我们用两个关键指标定义稳定性:
- kNN曲线的平滑程度
- 梯度变化的规律性
如果训练过程中这两个指标没有剧烈波动,我们认为训练是稳定的。
为什么第一层(patch projection)的不稳定会影响整个网络?
根据我们的梯度分析,第一层的梯度变化会按照Transformer的注意力机制传播到后续层。
由于self-attention的全局连接特性,这种影响会被放大并传递给所有后续层。
冻结第一层能解决问题,这说明了什么本质问题?
这说明Vision Transformer的架构存在一个关键的稳定性瓶颈:patch projection层。
这层需要学习从像素空间到token空间的映射,这个转换过程特别容易受到优化过程的影响。
为什么自监督训练比监督训练更容易出现不稳定?
自监督训练需要模型从数据中学习更复杂的表示,没有标签的直接指导。
这增加了优化难度,使得模型更容易陷入局部最优或不稳定状态。
大批量训练为什么会加剧不稳定性?
大批量训练会累积更多样本的梯度,增加了梯度更新的方差。
在patch projection层,这种累积效应特别明显,容易导致优化轨迹的剧烈波动。
相比CNN,Transformer架构的不稳定性有什么特殊之处?
相比CNN的局部连接,Transformer的全局注意力机制使得任何层的不稳定性都能快速传播到整个网络。
特别是第一层的不稳定性会被后续的self-attention层放大。
作者提出的解决方案是否足够优雅?还有其他可能的方案吗?
冻结patch projection是一个简单而有效的解决方案。
虽然看似违反端到端训练的直觉,但它揭示了一个重要的架构设计原则:并非所有层都需要同样的可塑性。
这个发现对未来更大规模模型的训练有什么启示?
我们的发现表明,随着模型规模增大,简单的架构修改(如冻结某些层)可能比复杂的优化策略更有效。
这为大规模模型训练提供了一个新的思路。
为什么自监督大模型反而表现更好,这违反了直觉吗?
这实际上很符合直觉:自监督学习提供了更丰富的学习信号,大模型有更强的容量来捕获这些信号。
而监督学习中,简单的分类任务可能导致大模型过拟合。
不同框架(MoCo/SimCLR/BYOL)对这个问题的敏感程度为什么不同?
这反映了不同框架在处理负样本和正样本时的策略差异。
MoCo使用队列机制,而BYOL完全不使用负样本,这些设计选择影响了它们对不稳定性的敏感程度。
如何从理论角度解释这种不稳定性现象?
从优化理论角度,这个现象可以理解为优化曲面的几何特性:patch projection层创建了一个高度非凸的优化曲面,随机初始化和固定这一层实际上是在简化这个优化问题。
patch projection层是不稳定性的主要来源,但您只提供了梯度传播的观察数据,没有理论证明。如何确保这不是一个表象而是根本原因?
虽然我们主要提供了梯度观察的证据,但有几个关键点支持这一结论:
- 梯度异常首先出现在第一层
- 冻结这一层能显著提升性能
- 这种现象在不同框架中都存在
我承认需要更深入的理论分析,这也是未来工作的重要方向。
实验显示冻结第一层能提升性能,但这是否意味着我们完全不需要训练这一层?这似乎与深度学习"端到端训练"的理念相悖,您如何解释这个矛盾?
这看似是个悖论,但实际揭示了一个重要观点:
- patch projection本质是一个维度变换
- 随机投影矩阵已经足够保留信息
- 端到端训练并非在所有情况下都是最优选择
您在实验中使用了固定的随机初始化patch projection,不同的随机初始化会导致显著的性能差异吗?如果会,这个方法的可复现性如何保证?
性能波动通常在0.1-0.3%范围内
这种差异远小于不稳定性带来的损失(1-3%)
使用合适的初始化方法(如正交初始化)可以进一步减小差异
文中提到使用BatchNorm替代LayerNorm可以提升性能,但您没有深入探讨为什么。这种改进是否与patch projection的冻结有关联?
这个改进确实与patch projection冻结有关:
- BN提供了更稳定的统计信息
- 减少了特征分布的偏移
- 帮助后续层更好地适应固定的patch projection
大模型(如ViT-H)在自监督学习中表现更好,而在监督学习中则相反。您认为这种差异的本质原因是什么?是否与预训练任务的复杂性有关?
根本原因在于任务性质:
- 自监督任务更复杂,需要更强的表示能力
- 对比学习提供了自然的正则化效果
- 避免了监督学习中的过拟合问题
对于"部分失败"现象(1-3%性能下降),您是如何确定这确实是训练不稳定导致的,而不是模型本身的性能上限?
我们通过多个证据确认:
- 相同配置下的多次实验对比
- 不同批量大小的渐进式实验
- 梯度行为的定量分析
您的方法在不同自监督框架中都有效,但效果差异显著(从0.6%到1.7%)。这种差异是否说明存在更深层的原理我们还未理解?
确实存在更深的原理:
- 框架的负样本处理策略不同
- 优化目标的数学形式不同
- 对梯度信息的利用方式不同
移除位置嵌入只导致很小的性能下降,这是否意味着当前的自监督训练范式没有充分利用空间信息?如何改进?
这确实说明了当前方法的局限:
- 对位置信息的利用不充分
- 需要设计更好的位置感知机制
- 可能需要重新思考空间信息的编码方式
您的实验主要集中在ImageNet数据集上,这些发现在其他领域(如医学图像、遥感图像)是否同样适用?如何验证其普适性?
我们承认这是一个局限:
- 主要验证在ImageNet上
- 不同领域的数据特性不同
- 需要更多领域特定的验证
论文提到这种不稳定性在卷积网络中罕见。那么,这是否意味着Transformer架构在视觉任务上存在某些根本性的缺陷?
这不一定是缺陷:
- 更像是一个需要特别处理的特性
- CNN的局部性提供了天然的稳定性
- Transformer的灵活性需要更谨慎的优化策略


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









