




0.背景
基于开源的地图制作工具osm以及开源的仿真引擎CARLA完成交通场景仿真场景的搭建。
1.构建OSM场景
https://www.openstreetmap.org/#map=16/31.2808/121.1690
1.1.搜索关键字

1.2. 手动选择不同的区域
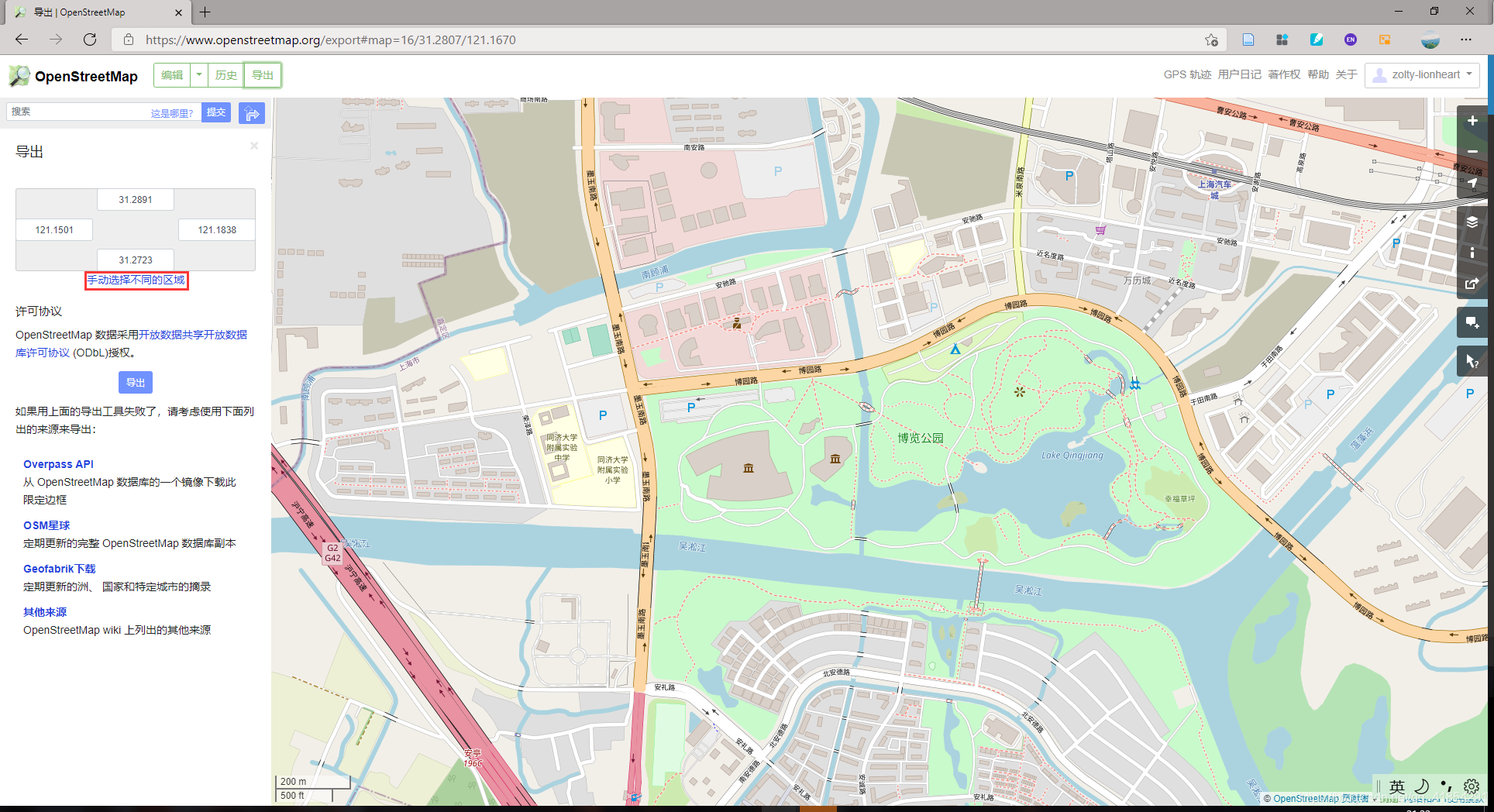
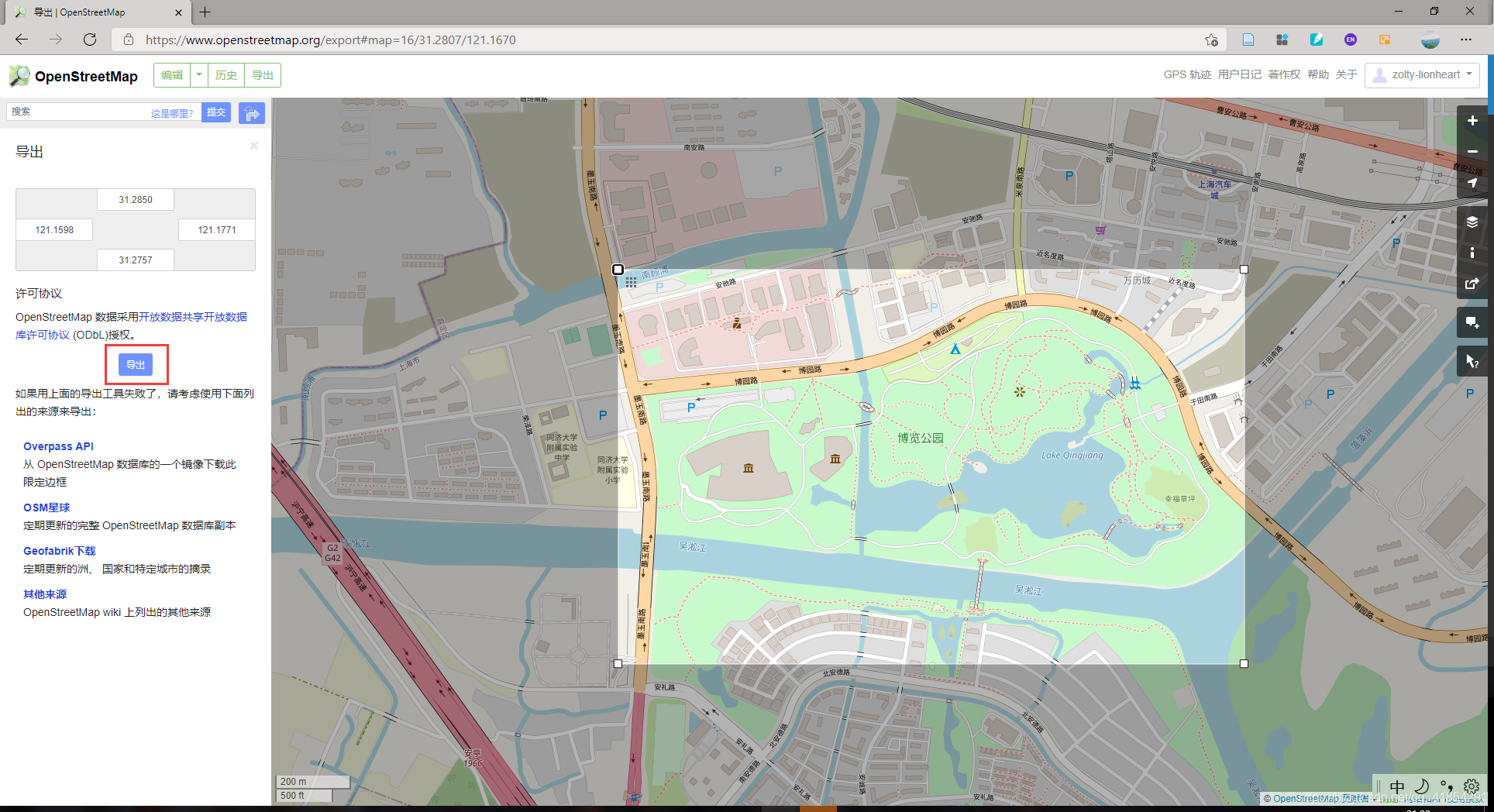
1.3.导出
导出为osm文件
2.osm->xodr
OpenStreetMap 格式文件后缀为.osm
OpenDERIVRE 格式文件后缀为.xodr
CARLA提供了转换方法:详情
OpenStre
 该博客介绍了如何利用开源地图制作工具OSM和仿真引擎CARLA来搭建交通场景仿真。首先,从OSM网站下载指定区域的地图数据,然后通过CARLA提供的osm2odr工具将OSM文件转换为XODR格式,适用于CARLA的仿真环境。在转换过程中,详细展示了Python代码实现。最后,尽管转换示例中提到的效果可能不尽如人意,但整个过程展示了将真实世界地图数据引入交通场景仿真的方法。
该博客介绍了如何利用开源地图制作工具OSM和仿真引擎CARLA来搭建交通场景仿真。首先,从OSM网站下载指定区域的地图数据,然后通过CARLA提供的osm2odr工具将OSM文件转换为XODR格式,适用于CARLA的仿真环境。在转换过程中,详细展示了Python代码实现。最后,尽管转换示例中提到的效果可能不尽如人意,但整个过程展示了将真实世界地图数据引入交通场景仿真的方法。
基于开源的地图制作工具osm以及开源的仿真引擎CARLA完成交通场景仿真场景的搭建。
https://www.openstreetmap.org/#map=16/31.2808/121.1690
导出为osm文件
OpenStreetMap 格式文件后缀为.osm
OpenDERIVRE 格式文件后缀为.xodr
CARLA提供了转换方法:详情
OpenStre
 1376
3270
1376
3270

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























