







 本文介绍使用Plant Simulation16.0软件搭建汽车总装车间滑橇线物流输送的仿真模型,涵盖2D布局、3D布局、代码思路及效果展示,旨在优化生产效率和布局。
本文介绍使用Plant Simulation16.0软件搭建汽车总装车间滑橇线物流输送的仿真模型,涵盖2D布局、3D布局、代码思路及效果展示,旨在优化生产效率和布局。
Plant simulation16.0汽车总装车间仿真第二步:仿真模型搭建Part01——滑橇线物流输送
简介
本系列课程准备用Plant simulation16.0软件简化仿真实现汽车总装车间的生产状况,计算产能,优化布局。本系列一共分四大部分,分别为:整体流程设定,仿真模型搭建,实验设计、数据统计,3D模型替换、整体优化。

该篇是本课程的第二部分:仿真模型搭建Part01——滑橇线(PBS线)物流输送
PBS系统是连接汽车生产线的涂装和总装车间的一个缓存区,创建在空中平台,将涂装车间车身输送线进行延长,通过涂装车间车身输送线及总装车间的输送系统两者的相互结合,从而创建了PBS输送线,实现了涂装车间及总装车间的相互连接。
PBS输送线能够解决传统人工运输的效率及成本问题,并且避免了车身表面碰撞的问题,提高了时间及顺序的遵守率,以此有效提高了汽车生产企业的运营效率。
PBS输送线根据生产要求将车身进行排序、编组、存储、输送,并将空滑撬进行堆垛储存运输、拆垛输送回上线点。主要设备类型包括 滑撬、滚床、转台、移行机、升降举升台、升降机、堆拆垛机、滑撬夹紧定位机构 等。
注:
plant simulation非本人专业工作,所有内容均为自己空闲时间编写调试,每一个部分的工作量都很大,所以更新时间不一定,但一定会把这个系列的课程做完。另外,我也是一边自学一边应用,所以有一些代码不一定是最优的,欢迎大家交流!
如有问题可以联系本人
QQ:2442922106最后强调一点:本项目软件为西门子 Plantsimulation 16.0 ,本人所用均为正版软件,谢谢。
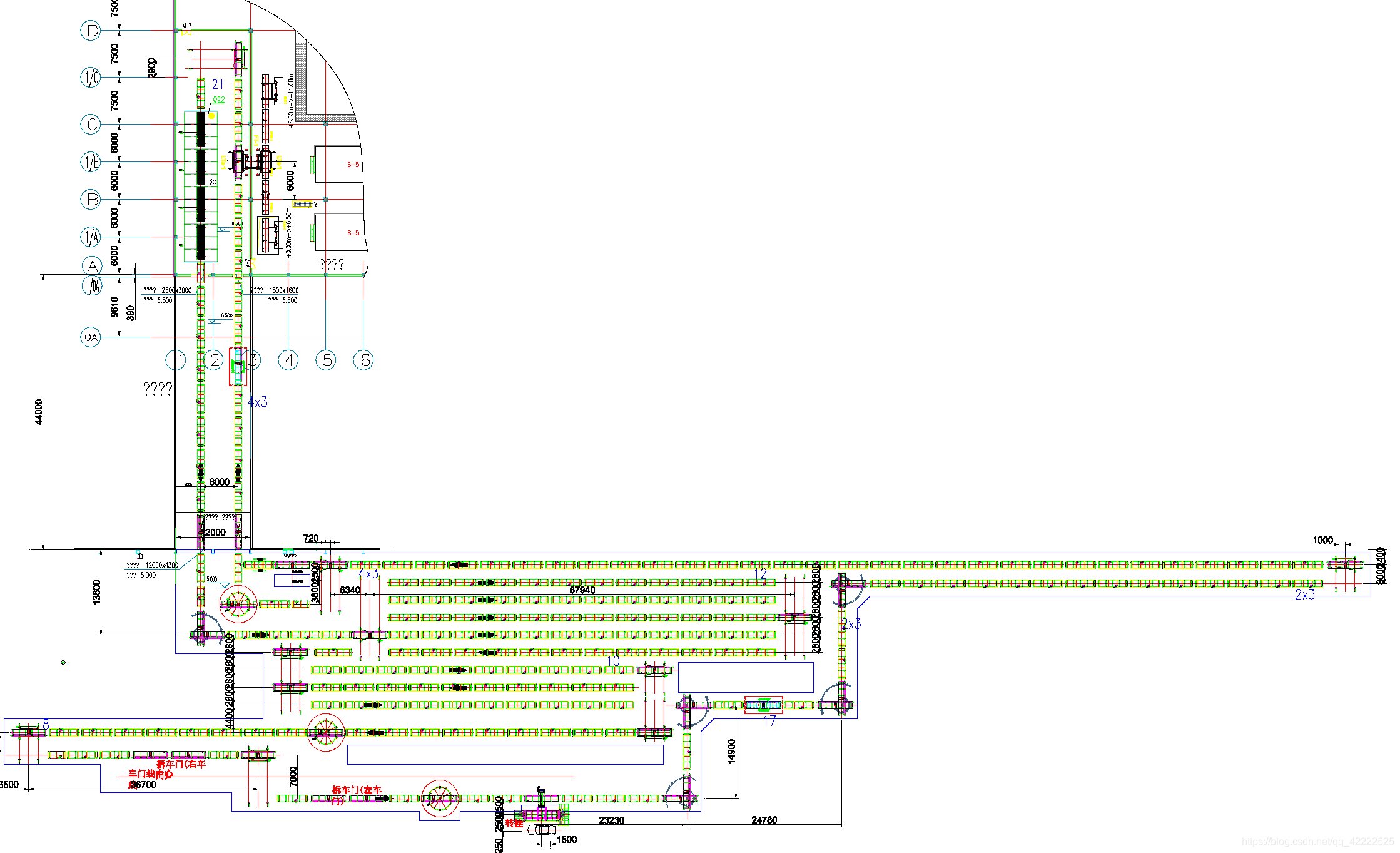
Ⅰ、2D下的布局
a、2D布局

b、2D布局实现
1)导入2D布局
导入布局有两种办法
第一种:直接将CAD文件导入到plant文件中的Frame中,这部分要注意下比例,默认是mm为单位;

第二种:将CAD文件导成图片,根据像素和距离比例换算导出图片的大小,再将Frame图标修改成导出的图片即可;
下图是导入2D后的Frame界面
2)工位布局
- 滚床
滚床起输送作用,所以我们用 Conveyor 来实例化滚床。
Conveyor 来实例化滚床。
但是这里有一个问题需要注意,项目中的滚床数量有200多个,为方便管理和维护,我们 派生 一个conveyor类出来,重命名为 “滑橇线”,同时定义好速度,加速度,每个滚床容量设置成 1(大家可以自己修改下参数,看下仿真出的结果有什么不一样)。

Tip:这里还有一个小技巧,因为滑橇很多,我们可以用method来创建滑橇。如果不是用method,是在2D下进行复制布局,那么给“滑橇线”控件加一个构造器方法,保证复制名称连续,代码如下:
self.initName
-- param onCreate3D: boolean
var objFarme:object
var intobjNum:integer
objFarme:=?.~
for local i:= 1 to objFarme.numNodes loop
if ?.class = objFarme.node(i).class
intobjNum + 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1260
1260

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









