







在本章中我们将会引入配置空间(Configuration Space)这一个概念,这会帮助我们在一个统一的框架内解决路径规划问题。
上一章链接:
Robotics: Computational Motion Planning(路径规划)笔记(一):基于图搜索的方法-Grassfire、Dijkstra和A*算法
配置空间
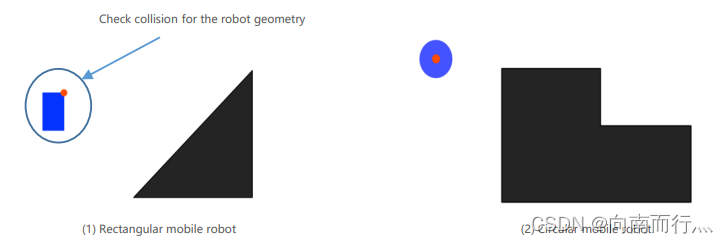
我们知道,机器人有不同的形状和尺寸,如果我们要规划机器人的移动路径,我们是需要进行碰撞检测的,目的是防止机器人撞到障碍物上,所以我们在进行路径规划时需要知道机器人的几何信息:
但是通过引入配置空间,在这个空间里我们就可以将机器人当作一个质点来分析,这就大大减小了路径规划的复杂性,但是我们就需要同时也要在配置空间里表示障碍物:
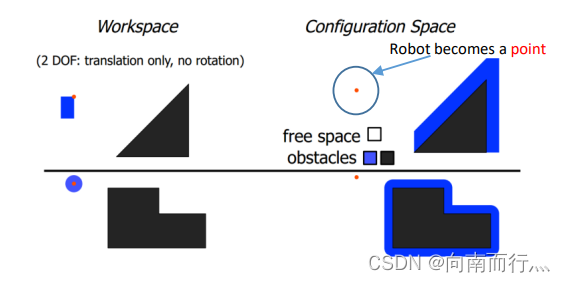
如上图所示,我们来看一个有两个自由度的机器人,也就是说机器人只能平移,不能旋转。在工作空间里,机器人还是有尺寸,并且有不同形状的。但是在配置空间里,机器人就变成了一个质点,这时候我们还需要在配置空间里表示障碍物:
总结
- 在工作空间: 机器人有形状和大小,难以进行运动规划
- 在配置空间(Configuration Space):
- 机器人是一个点
- 障碍物需要在配置空间中表示
- 在配置空间中表示障碍物可能非常复杂。因此,在实践中使用了近似(但更保守)表示法:
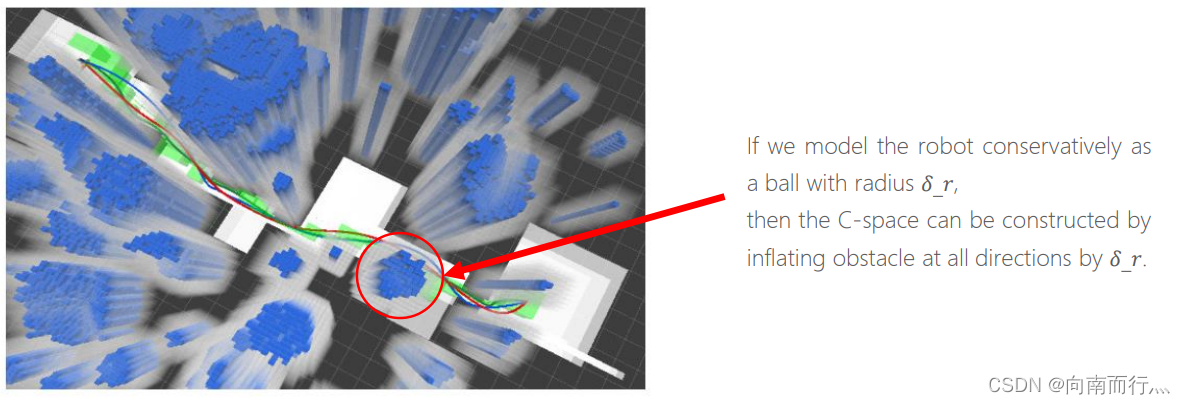 如果是在三维空间中,我们可以把机器人当做一个球体来看待,这个球体要完全包围住机器人,其半径就是
如果是在三维空间中,我们可以把机器人当做一个球体来看待,这个球体要完全包围住机器人,其半径就是 ,那么在配置空间中我们可以把所有障碍物进行膨胀操作,即把障碍物朝各个方向扩大
。
下一章链接:
Robotics: Computational Motion Planning(路径规划)笔记(三):基于采样的方法-PRM和RRT算法



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











