






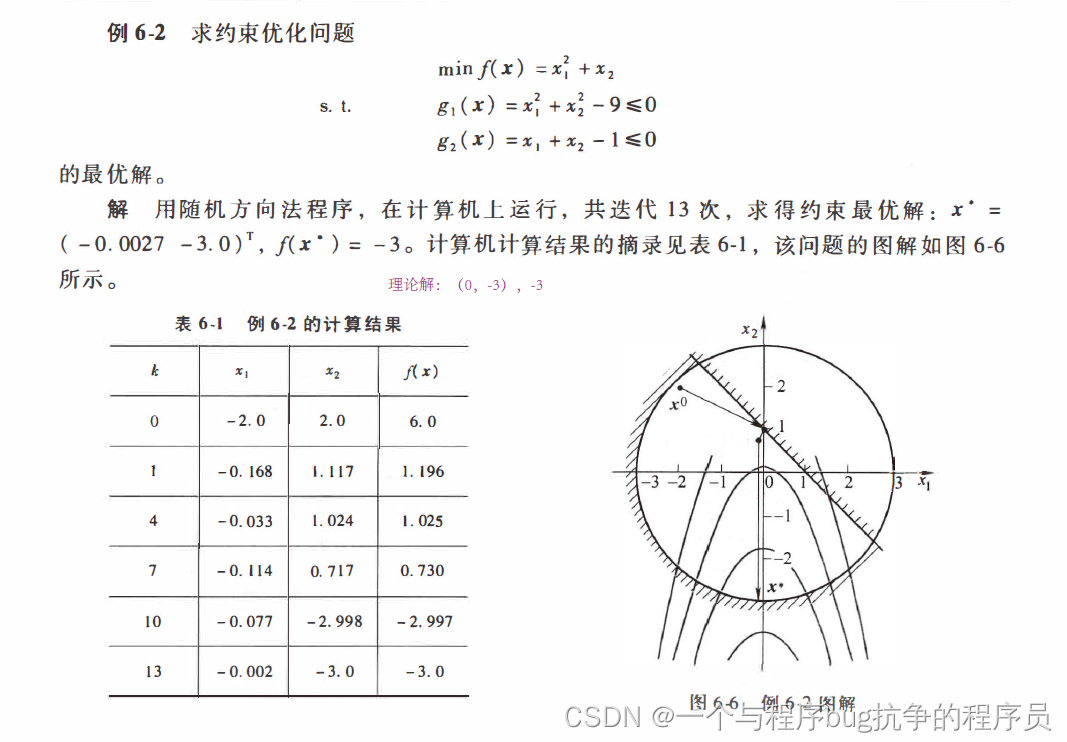
问题以机械优化设计(哈工大第五版课本例6-2)为例, 求解如下图所示的约束优化问题。
源代码包含三个matlab的m文件,分别为目标函数、约束函数及随机方向法主文件。
(1)目标函数fun.m
function f=fun(x)
f=x(1)^2+x(2);(2)约束函数gcon.m
function g=gcon(x)
g=[
x(1)^2+x(2)^2-9
x(1)+x(2)-1
];(3)随机方向法主文件RandomDirectionMethod.m
clc,clear
tic %计时开始
%% 初始量赋值(目标函数、约束条件单独写到m文件中)
n=2; %自变量个数
a0=0.1; %试验步长
epsilon=1e-6; %收敛精度
k=8; %随机搜索方向个数
a=-3; %自变量下限值
b=3; %自变量上限值
%%
%% 选择初始点
while 1
x0=a+(b-a)*rand(n,1); %产生一个随机初始点,由约束1得自变量取值区间为(-3,3)
g=gcon(x0); %计算产生的随机点约束函数值
if all(g<=0)
break;
end
end
f0=fun(x0); %计算初始随机可行点函数值
% x0,f0 %调试是否生成初始可行点x0
%%
while 1
%% 产生可行搜索方向
a0=0.1;
r=zeros(n,k); %存放k个随机方向
e=zeros(n,k); %存放k个单位化随机方向
while 1
j=1; %用来记录沿随机方向移动后可行点数目的计数变量
for i=1:k
r(:,i)=rands(n,1); %产生一个坐标(-1,1)之间的随机方向
e(:,i)=r(:,i)/norm(r(:,i)); %单位化随机方向
xs=x0+a0*e(:,i); %计算沿随机方向移动后的自变量点
gz=gcon(xs);
if all(gz<=0)
fs=fun(xs); %计算移动后可行点的目标函数值
x(:,j)=xs; %记录沿随机方向移动后的可行点
fz(:,j)=fs; %记录沿随机方向移动后的可行点目标函数值
j=j+1;
else
continue;
end
end
xf=[x;fz]; %xf为三行矩阵,前两行代表移动后可行点,第三行代表移动后可行点的目标函数值
[B,ind]=sort(xf(n+1,:)); %升序排列移动后可行点的目标函数值
fl=B(1); %获取最小的移动后可行点的目标函数值
if fl<f0
break;
else
a0=0.9*a0; %若的所有可行点目标函数值都大于初始值f0,则缩小步长,重新生成随机方向试探
end
end
xl=x(:,ind(1)); %找到沿随机方向移动后目标函数值最小且小于f0的可行点
d=xl-x0; %找到一个可行搜索方向
% xl,fl,f0,d %调试是否找到一个可行方向
f0=fl; %将初始点移动到试探可行点
x0=xl;
%%
%% 沿可行方向采用加速步长进行搜索
while 1
a0=1.3*a0; %步长加速
xl=x0+a0*d; %计算沿可行方向移动到的下一点
fl=fun(xl); %计算移动后的目标函数值
g=gcon(xl); %计算移动后的约束函数值
if(all(g<=0) && fl<f0)
x0=xl; %若移动的点满足约束条件且函数值下降,则将x0点移动到xl
f0=fl;
else
break;
end
end
xn=x0-a0*d/1.3; %计算满足约束条件且函数值下降的极限点x0的前一点xn
fl=fun(xn); %计算满足约束条件且函数值下降的极限点x0的前一点xn的函数值,以计算收敛条件
% xn,fl
% x0,f0 %调试沿可行方向加速搜索后的可行点
%%
if abs((f0-fl)/f0)<epsilon %判断是否达到收敛精度
break;
end
end
xe=x0;
fe=f0;
xe,fe %输出最优点坐标及函数值
toc %计时结束
程序运行结果如下:
由于初始点是程序随机生成的,故每次运行结果都有细微差别。可以看到运行结果和理论解(0,-3),3十分接近,通过设置改小收敛精度epsilon的值,可以提高计算精度。
为防丢失,源程序文件夹放在了下面百度网盘链接:
链接:https://pan.baidu.com/s/1KQ8uWSGcZd7gYCBdX0xTCw
提取码:gsse

















 678
678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









