






概要
通常方位测量是在相对于地球静止的载体上进行的,寻北仪测出的是地球转动角速率向量的分量,光纤陀螺寻北由采样方式和解算方式的不同,主要可以分为二位置寻北法、四位置寻北法、多位置测量寻北法、连续转动寻北法。
二位置寻北
二位置寻北方案是采用相隔180°的两点进行数据采集,由于采样位置少,光纤陀螺随机漂移影响的概率比较小。光纤陀螺在两个位置的输出为:

两式相减即可求得方位角。
二位置寻北需要考虑的问题:用哪两个位置,以及输出角度范围的问题。
四位置寻北
四位置寻北既光纤陀螺相隔90°转动四个位置进行数据采集,每个位置电机停30s-50s,采集数据并求均值,在不考虑俯仰角、横滚角的情况下可以得到四个方程:
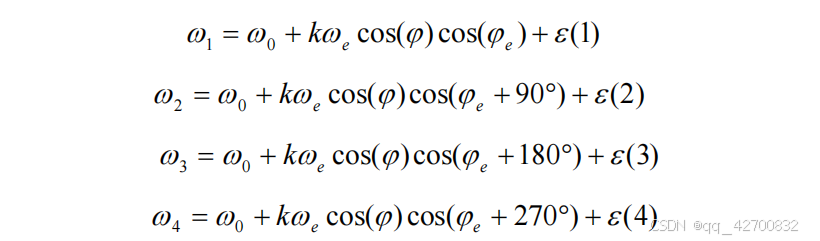
即式3减式1 ,式2 减式4,去掉ω0的影响,四组测量求解获得北向方位角,考虑俯仰角、横滚角的公式可自行推导。三位置寻北和四位置寻北类似,少一个位置采样点,进行公式推导。
多位置寻北
多位置寻北是在0-360°范围内进行多位置采样,数据采集,然后进行最小二乘法进行方差拟合,在一周中取n个位置,输出公式为:
将多个公式进行最小二乘拟合,即可求得方位角。
连续旋转寻北
连续旋转寻北,首先将光纤陀螺在第一位置进行连续转动N圈,再将光纤陀螺转动至第二位置进行连续转动N圈,对两组数据进行求和求解,即可求得方位角。

















 1790
1790

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









