







 本文探讨了开环与闭环系统的概念,指出闭环控制能消除偏差但可能导致稳态误差。讨论了PD控制的优缺点,以及为何在实际应用中常常需要低通滤波器。提到了滞后超前矫正和PID控制的差异,解释了系统矫正的实际操作和计算机实现的可能性。同时,文章涉及了Bode图在系统分析中的作用,强调了闭环带宽和穿越频率的概念。最后,作者提出了串级PID控制的复杂性和系统型别的定义问题。
本文探讨了开环与闭环系统的概念,指出闭环控制能消除偏差但可能导致稳态误差。讨论了PD控制的优缺点,以及为何在实际应用中常常需要低通滤波器。提到了滞后超前矫正和PID控制的差异,解释了系统矫正的实际操作和计算机实现的可能性。同时,文章涉及了Bode图在系统分析中的作用,强调了闭环带宽和穿越频率的概念。最后,作者提出了串级PID控制的复杂性和系统型别的定义问题。
1.开环与闭环
如图所示的质量弹簧阻尼块,其 传递函数 为
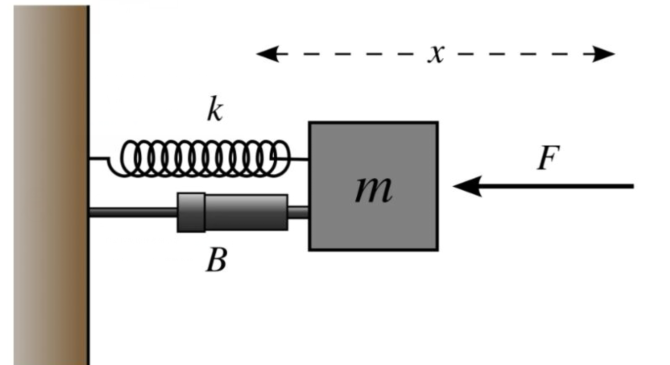

**1.**这是系统本身的传递函数,是开环传函或者闭环传函吗?我听过一种说法,说开环传函是在反馈系统中人为定义出来的,如果系统没有反馈,直接是输入系统然后输出,那么就没有开环传函。
**2.**常见的另一种说法:
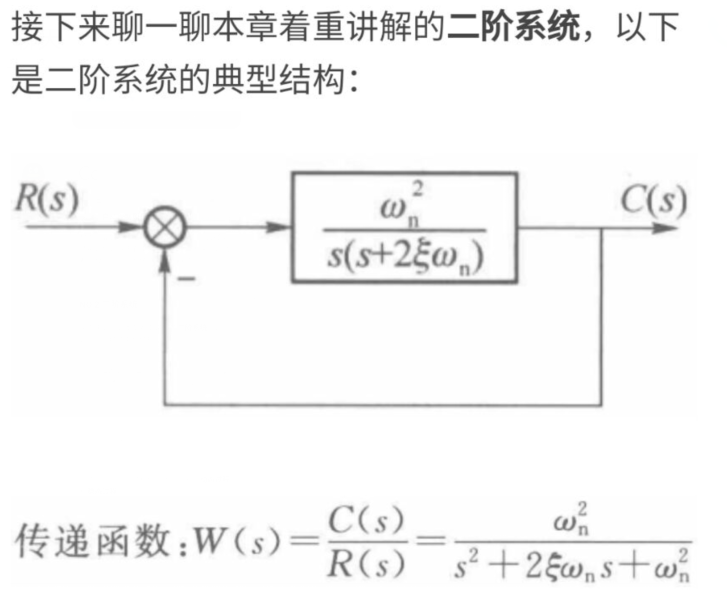
这样把二阶系统画成了框图的形式,并且是单位负反馈。那这样求得的传递函数到底是什么传递函数呢?是系统本身的传递函数?是闭环传函?
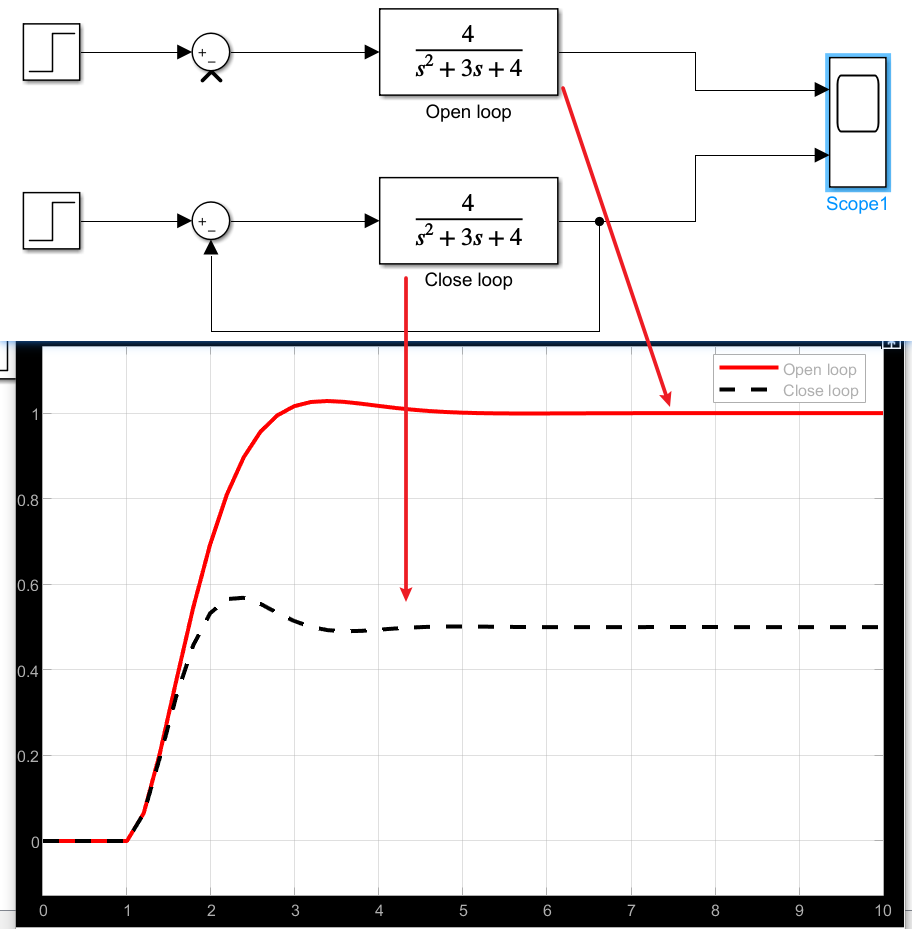
3. **最大的疑问:**课本上对系统进行时域分析的时候,分别分析了一节系统和二阶欠阻尼系统的时域响应,他们都是稳定的。但是在最开始学自控的时候,说闭环控制相对开环控制可以消除偏差。但是对一阶和二阶系统,我做单位负反馈之后,还是一阶或者二阶系统,只是系统的参数发生了改变。那么反馈控制还有什么用呢?因为课本上总是使用单位负反馈的例子。
假设上面的二阶系统中,Wn=2,ξ=0.75,那么系统稳定。如果我做单位负反馈,还是二阶系统,只不过系统的Wn和ξ变了,此时反馈控制的优势在哪里?**并且:**单位阶跃输入,开环系统没有稳态误差,闭环反而有了稳态误差(我知道是因为闭环之后系统的增益从1变成了0.5)怎么解释这个现象呢?(是不是开环系统就没有稳态误差这个说法?)
4.闭环控制系统可以得到其传递函数,如果这个系统是整个系统的一部分,那么就将其闭环传函看成系统的一个环节,直接用闭环传递函数串进总系统,此时是小系统的闭环传函,大系统的开环传函?
2.PD控制
之前听老师说不管什么样的系统直接用一个PD控制,然后怎么怎么样…
- D项会放大高频噪声,并且如果没有积分控制还会存在稳态误差,那么经常使用的为什么不是PI控制呢?
3.滞后超前矫正和控制器?
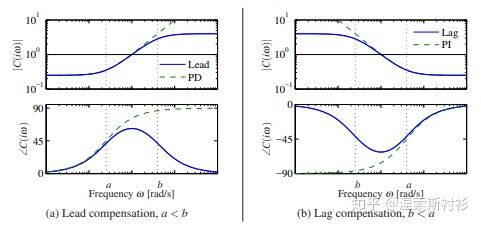
学的滞后矫正和PI,超前矫正和PD,他们是相似但却不同的?
**1.**PD控制在高频段仍旧是20db/dec,会放大高频噪声,所以实际使用通常需要在PD控制器后面串联一个低通滤波器?
2.PI控制等效为积分环节和一阶微分环节,跟滞后矫正的一阶惯性环节和一阶微分环节的不同是否在于PI控制引入了积分环节,提高了系统的型别,从而可以消除稳态误差。而滞后校正不能消除稳态误差?
**3.**滞后校正和超前矫正实际是怎么操作的?是在系统中串入物理装置吗?比如串入RLC电路。能否通过计算机离散的形式实现呢?此外,我知道PID可以离散实现,那么能否用串入物理装置的方式实现呢?
**4.**为什么一节微分环节实际物理系统无法实现(或者分子比分母阶次高的物理都不能实现)?那能通过计算机离散的形式实现吗?
**5.**课本上称超前滞后为矫正,矫正和控制器比如PID是不是一样的?系统进行了矫正之后,还需要使用PID进行控制吗?
4.bode图问题
**1.**画bode图是不是都是画开环系统的bode图?最常听见的一句话就是用开环bode图分析闭环稳定性。闭环bode图是不是仅仅在看系统带宽Wb的时候才画,去找-3db时候的频率就是带宽截止频率?
**2.**穿越频率Wc近似等于系统闭环带宽Wb?并且闭环带宽Wb大于穿越频率Wc,倍数在1-2之间。
**3.**为什么要求开环bode图尽量以-20db/dec穿越0分贝线?
**4.**经过矫正后的系统,画他的开环 bode 图已经满足性能要求了,那么我再看时域响应的时候,是看闭环系统的时域响应图吗?
**5.**我在使用simulink仿真一篇论文中的电机模型时,原文是对电机速度环进行控制,对电机的数学模型进行了超前校正,然后闭环的时域响应就比较好了,超调和快速性都很好。但是我去掉他的矫正环节,直接对电机做PID速度环,使用simulink的PID Tuner调节,发现如果不考虑实际的物理系统的输出限制(PID输出不限幅),理论上可以通过调整PID参数让系统的性能无限好(Wc几千,相位裕度也很大),但是此时PID参数值非常大(10^4数量级),显然实际不能用。那么我想到一个问题就是,倘若不对系统进行矫正,单纯就用PID控制,并且给定了性能指标,理论上PID是可以达到这个性能指标的,但是此时有可能输出非常大,所以实际并不可行。那么是不是此时就必须进行系统矫正?PID就不是万能的了?
5.复平面零极点问题
**1.**零极点对消?
6.串级PID的调参问题
**1.**串级PID如何调参?能像bode图矫正那样来指导PID参数的选择吗?
**2.**电流环一阶(或二阶),速度环多了PID和一个积分,位置环又多了PID和一个积分,这样系统变得很复杂。
7.典型I II型系统,一二阶系统
**1.**系统的型别和阶数到底怎么定义?

















 2815
2815

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









