






引言
从前面章节中,推导出了变换器的小信号等效电路模型,并对其进行了线性化处理,在加上反馈回路后(引入闭环控制可以使得输出稳定)就得到了如下图所示系统的等效模型。

输入到输出的传递函数如下

其中

所以我们设计变换器系统的目的就是在将公式中的T/1+T做的尽可能接近于1,(这样输出电压只受参考电压控制),1/1+T做的尽可能小(这样外界扰动比如输入电压扰动和负载扰动不会影响输出电压的变化)。这就需要在反馈回路中人为的设计补偿器来尽可能满足上式要求。 不过作为控制系统的三大指标——稳准快,稳定性是需要首先考虑的。
即使环路增益T(s)很多情况下是没有右半平面零点的,但是闭环增益1/1+T以及T/1+T却很有可能包含右半平面零点,所以下面这些理论的目的就是研究闭环传递函数的稳定性判据。
稳定性判据一般的方法是奈奎斯特稳定性判据,但是大多数情况下有种更简单的方法——相位裕度测试,所以下面先介绍这种方法。
相位裕度测试
在这种方法中,穿越频率fc是环路增益T幅值为0时的频率,相角裕度是fc处对应的相角再加上180°
判据判断系统稳定要满足的条件:
1、只有一个穿越频率fc
2、环路增益T(s)没有右半平面极点
3、相角裕度大于0
如果前两个条件满足,第3个条件不满足,则闭环传递函数就不稳定。
如果前两个条件有其中一个不满足,则该判据失效(无法判断稳定还是不稳定)。

上图中假设环路增益是稳定的,则再根据上面的几个条件就可以判断出该闭环传函稳定。
奈奎斯特稳定性判据
下面再来介绍能普遍应用的奈奎斯特稳定性判据:
先看一组公式:
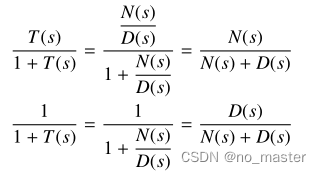
从上面的式子中我们可以看出闭环传递函数分母与1+T(s)的分子相同,也就是说我们只要判断出了1+T的右半平面的零点个数,也就可以判断出上式两个闭环传函的右半平面的极点个数,从而也就可以判断稳不稳定了。所以问题得到转化:即怎样判断1+T的右半平面零点个数。
保角映射
这就要先讲讲保角映射:
首先定义一个T(s)
T
(
s
)
=
s
−
s
1
T(s)=s-s~1~
T(s)=s−s 1
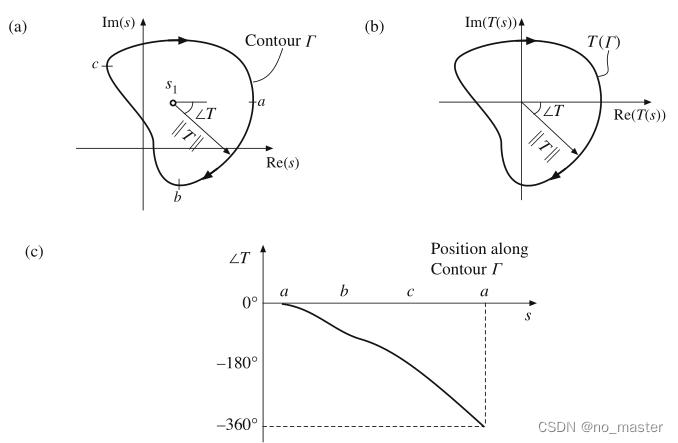
假设有一条轮廓线
Γ
\Gamma
Γ 如下图顺时针绕s1旋转一周,则将
s
=
Γ
s=\Gamma
s=Γ 代入到T(s)后得到的
T
(
Γ
)
T(\Gamma)
T(Γ)将同样顺时针绕原点一周(相对于角度的净改变量为-360°),并且在同样的a,b,c三点,其角度也是对应相同的,这就是保角映射。
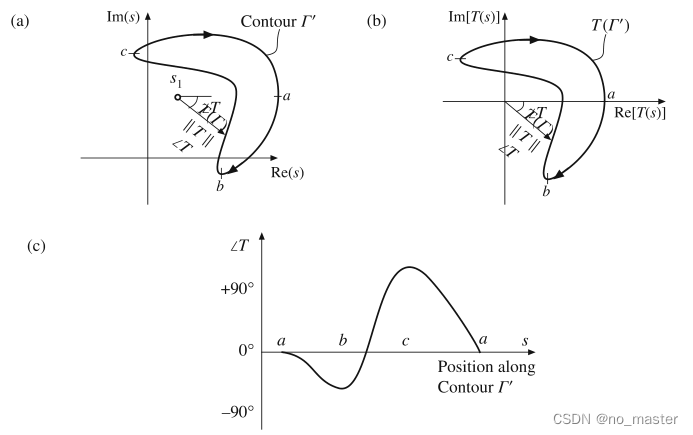
相反的例子如下图,假设s1在轮廓线
Γ
\Gamma
Γ 外,则将
s
=
Γ
s=\Gamma
s=Γ 代入到T(s)后得到的
T
(
Γ
)
T(\Gamma)
T(Γ)将同样不包围原点(相对于原点的角度净改变量为0)。
所以我们就可以说在顺时针情况下
Γ
\Gamma
Γ 绕零点一圈,
T
(
Γ
)
T(\Gamma)
T(Γ)就会顺时针绕原点一圈,对应的顺时针情况下
Γ
\Gamma
Γ 绕极点一圈,
T
(
Γ
)
T(\Gamma)
T(Γ)就会逆时针绕原点一圈。
进而我们就可以推得下式复杂传递函数的情况:

假设有Z个零点和P个极点,那
T
(
Γ
)
T(\Gamma)
T(Γ)将会顺时针绕原点N圈。
其中N=Z-P。
因此根据这个原理我们可以由其中任意两个量判断出第三个量,即可以判断出轮廓线中的零点或者极点数量。
奈奎斯特轮廓定义
而由于我们这里稳定性要判断的是右半平面1+T的零点数目,所以我们需要首先把轮廓线
Γ
\Gamma
Γ定义为下图所示:

其中
Γ
\Gamma
ΓA定为

Γ
\Gamma
ΓB定为

Γ
\Gamma
ΓC定为

经过上面的定义,我们就将轮廓线
Γ
\Gamma
Γ包围了整个右半平面。
判据内容
现在万事具备,就只欠将这个特定的
Γ
\Gamma
Γ代入到1+T(s)中了,从而根据1+T(
Γ
\Gamma
Γ)中包围原点的数目N和1+T(
Γ
\Gamma
Γ)的右半平面极点数目(其实就是T(
Γ
\Gamma
Γ)的右半平面极点数目),就能知道1+T(s)的右半平面零点的数目。
又由于我们通常喜欢直接画T(
Γ
\Gamma
Γ)的轨迹图,所以我们就将N定义为了T(
Γ
\Gamma
Γ)包围(-1,0)这个点的数目,其实和1+T(
Γ
\Gamma
Γ)中包围原点的数目N是一样的。
因此我们的判断系统稳定时的主要工作就是
1.画T(
Γ
\Gamma
Γ)的轨迹图,
2.看出T(
Γ
\Gamma
Γ)包围(-1,0)这个点的数目N,
3.知道T(
Γ
\Gamma
Γ)的右半平面极点数目P(一般为0),
就可以知道1+T(s)的右半平面零点的数目Z,也就是闭环传递函数的右半平面的极点数目,从而判断系统是否稳定。
这就是奈奎斯特稳定判据的全部内容了。难度不高,主要是绕了一些。
实例
下面的例子用来总结一下:
假设环路增益T(s)为:

也就是有三个左半平面的极点,首先我们将上面定义的
Γ
\Gamma
ΓA,代入到上面的T(s)中,可以得到
再将其他两部分代入得到总的T(
Γ
\Gamma
Γ)

所以根据上图N(包围-1点的圈数)=0,P(右半平面极点数)=0,因此Z(右半平面1+T(s)零点数)=0,也就是闭环传函的右半平面极点数为0,所以该系统稳定。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









