







无源时差定位与跟踪技术研究------陈莹莹
1. 时差定位原理
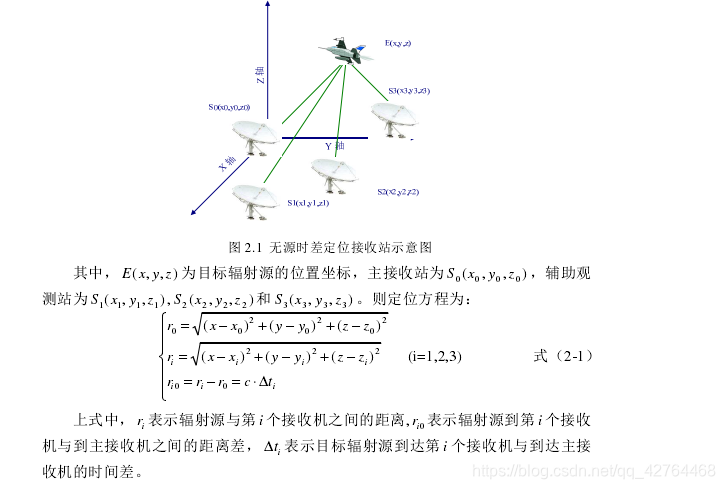
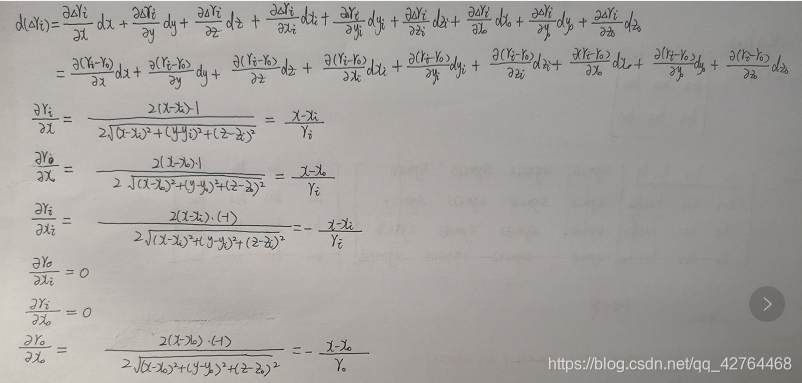
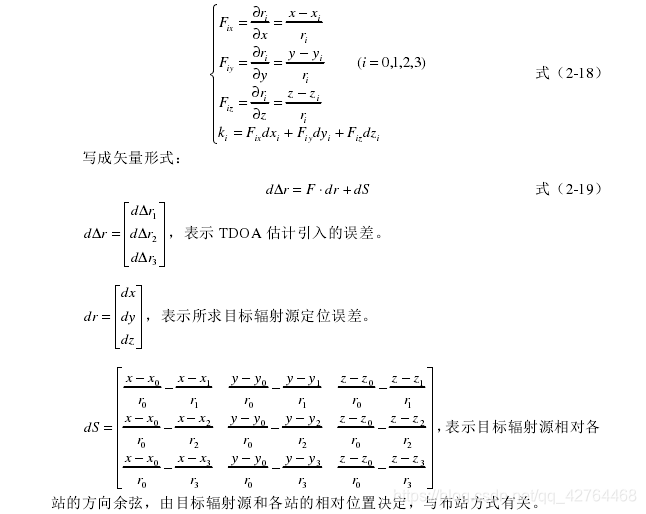
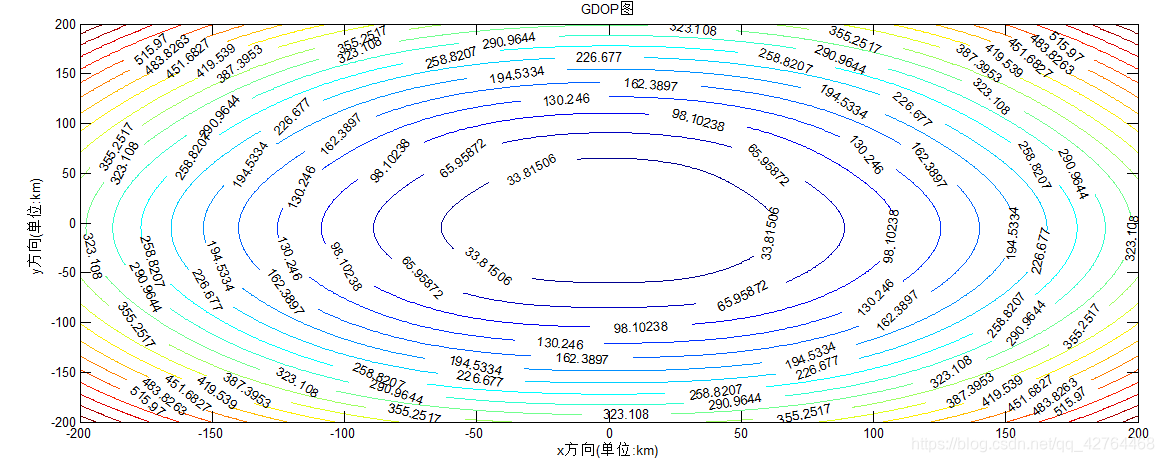
2. 时差定位精度分析

上式的说明:
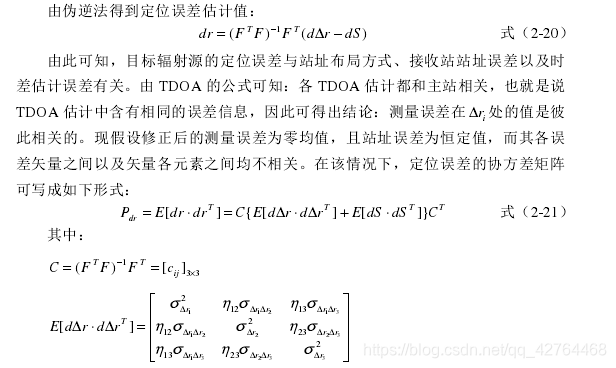


仿真结果:
clc;
clear;
x2=-12.99; x3=12.99; xt=0; x1=0;
y2=7.5; y3=7.5; yt=-15; y1=0;
z2=0.01; z3=0; zt=0.01; z1=0.01;
z=15;
y=-200:1:200;x=-200:1:200;
for i=1:401
for j=1:401
m=x(i);
n=y(j);
r1=((m-x1).^2+(n-y1).^2+(z-z1).^2).^(1/2);
r2=((m-x2).^2+(n-y2).^2+(z-z2).^2).^(1/2);
r3=((m-x3).^2+(n-y3).^2+(z-z3).^2).^(1/2);
rt=((m-xt).^2+(n-yt).^2+(z-zt).^2).^(1/2);
c11=(m-x1)/r1;c21=(m-x2)/r2;c31=(m-x3)/r3;ct1=(m-xt)/rt;
c12=(n-y1)/r1;c22=(n-y2)/r2;c32=(n-y3)/r3;ct2=(n-yt)/rt;
c13=(z-z1)/r1;c23=(z-z2)/r2;c33=(z-z3)/r3;ct3=(z-zt)/rt;
c=[(-ct1+c11) (-ct2+c12) (-ct3+c13);(-ct1+c21) (-ct2+c22) (-ct3+c23);(-ct1+c31) (-ct2+c32) (-ct3+c33)];
b=inv(c'*c)*(c');
b11=b(1);
b12=b(4);
b13=b(7);
b21=b(2);
b22=b(5);
b23=b(8);
b31=b(3);
b32=b(6);
b33=b(9);
sigmap=0.5;%测量误差的标准差
sigmas=0.0075;%测时误差
eta=0.35;%Ri站距离和测量之间的相关系数
sigma11=sigmap.^2+sigmas.^2*2;
sigma12=eta*sigmap.^2+sigmas.^2;
sigma13=eta*sigmap.^2+sigmas.^2;
sigma21=eta*sigmap.^2+sigmas.^2;
sigma22=sigmap.^2+sigmas.^2*2;
sigma23=eta*sigmap.^2+sigmas.^2;
sigma31=eta*sigmap.^2+sigmas.^2;
sigma32=eta*sigmap.^2+sigmas.^2;
sigma33=sigmap.^2+sigmas.^2*2;
sigmax2=b11*b11*sigma11+b11*b12*sigma12+b11*b13*sigma13+b12*b11*sigma21+b12*b12*sigma22+b12*b13*sigma23+b13*b11*sigma31+b13*b12*sigma32+b13*b13*sigma33;
sigmay2=b21*b21*sigma11+b21*b22*sigma12+b21*b23*sigma13+b22*b21*sigma21+b22*b22*sigma22+b22*b23*sigma23+b23*b21*sigma31+b23*b22*sigma32+b23*b23*sigma33;
sigmaz2=b31*b31*sigma11+b31*b32*sigma12+b31*b33*sigma13+b32*b31*sigma21+b32*b32*sigma22+b32*b33*sigma23+b33*b31*sigma31+b33*b32*sigma32+b33*b33*sigma33;
gdop(j,i)=(sigmax2+sigmay2+sigmaz2).^(1/2);
end
end
figure(1);
%contour(Z,n),n指定了等高线的条数,用于绘制矩阵的等高线
[c,handle]=contour(x,y,gdop,20);
clabel(c,handle);
xlabel('x方向(单位:km)');
ylabel('y方向(单位:km)');
title('GDOP图');


















 4654
4654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











