







环境
Ubuntu 20.04
ROS Noetic
Moveit SetUp Assistant version==2.0
解决方法
插件安装问题
首先,查看roslaunch ur10_moveit_config ur10_moveit_planning_execution.launch sim:=true命令是否报错,我遇到如下报错:
[ERROR] [1731978993.031378271]: The kinematics plugin (manipulator) failed to load. Error: According to the loaded plugin
descriptions the class
trac_ik_kinematics_plugin/TRAC_IKKinematicsPlugin with base class type
kinematics::KinematicsBase does not exist. Declared types are
cached_ik_kinematics_plugin/CachedKDLKinematicsPlugin
cached_ik_kinematics_plugin/CachedSrvKinematicsPlugin
kdl_kinematics_plugin/KDLKinematicsPlugin
lma_kinematics_plugin/LMAKinematicsPlugin
srv_kinematics_plugin/SrvKinematicsPlugin
ur_kinematics/UR10KinematicsPlugin ur_kinematics/UR10eKinematicsPlugin
ur_kinematics/UR16eKinematicsPlugin ur_kinematics/UR20KinematicsPlugin
ur_kinematics/UR30KinematicsPlugin ur_kinematics/UR3KinematicsPlugin
ur_kinematics/UR3eKinematicsPlugin ur_kinematics/UR5KinematicsPlugin
ur_kinematics/UR5eKinematicsPlugin
[ERROR] [1731978993.031432015]: Kinematics solver could not be instantiated for joint group manipulator.
这个错误表明 MoveIt! 无法加载指定的运动学插件(trac_ik_kinematics_plugin/TRAC_IKKinematicsPlugin)。MoveIt! 尝试加载这个插件,但找不到它。以下是一些可能的原因和解决方法:
可能的原因
-
插件未安装:
trac_ik_kinematics_plugin插件可能没有安装。 -
插件路径问题:
MoveIt! 无法找到trac_ik_kinematics_plugin插件的路径。 -
配置文件问题:
MoveIt! 配置文件可能指定了错误的插件。
解决方法
-
安装
trac_ik_kinematics_plugin插件
确保你已经安装了trac_ik_kinematics_plugin插件。你可以通过以下命令来安装:
sudo apt-get install ros-noetic-trac-ik-kinematics-plugin -
检查插件路径
确保trac_ik_kinematics_plugin插件的路径正确。你可以通过以下命令来检查:
rospack find trac_ik_kinematics_plugin
你应该看到类似以下的输出:
/opt/ros/noetic/share/trac_ik_kinematics_plugin
如果没有输出,说明插件路径可能有问题。 -
修改 MoveIt! 配置文件
如果trac_ik_kinematics_plugin插件无法使用,你可以尝试使用其他可用的运动学插件。你可以通过以下步骤来修改 MoveIt! 配置文件:打开配置文件:
打开ur10_moveit_config包中的kinematics.yaml文件。你可以通过以下命令来打开:
roscd ur10_moveit_config
gedit config/kinematics.yaml
修改插件配置:
将kinematics_solver参数修改为其他可用的插件。例如,使用kdl_kinematics_plugin/KDLKinematicsPlugin:manipulator: kinematics_solver: kdl_kinematics_plugin/KDLKinematicsPlugin kinematics_solver_search_resolution: 0.005 kinematics_solver_timeout: 0.005 kinematics_solver_attempts: 3保存并关闭文件:
保存并关闭 kinematics.yaml `文件。 -
重新启动 MoveIt! 配置
重新启动 MoveIt! 配置,以便加载修改后的配置文件:
roslaunch ur10_moveit_config ur10_moveit_planning_execution.launch sim:=true
通常是安装插件的问题,重新安装一遍即可
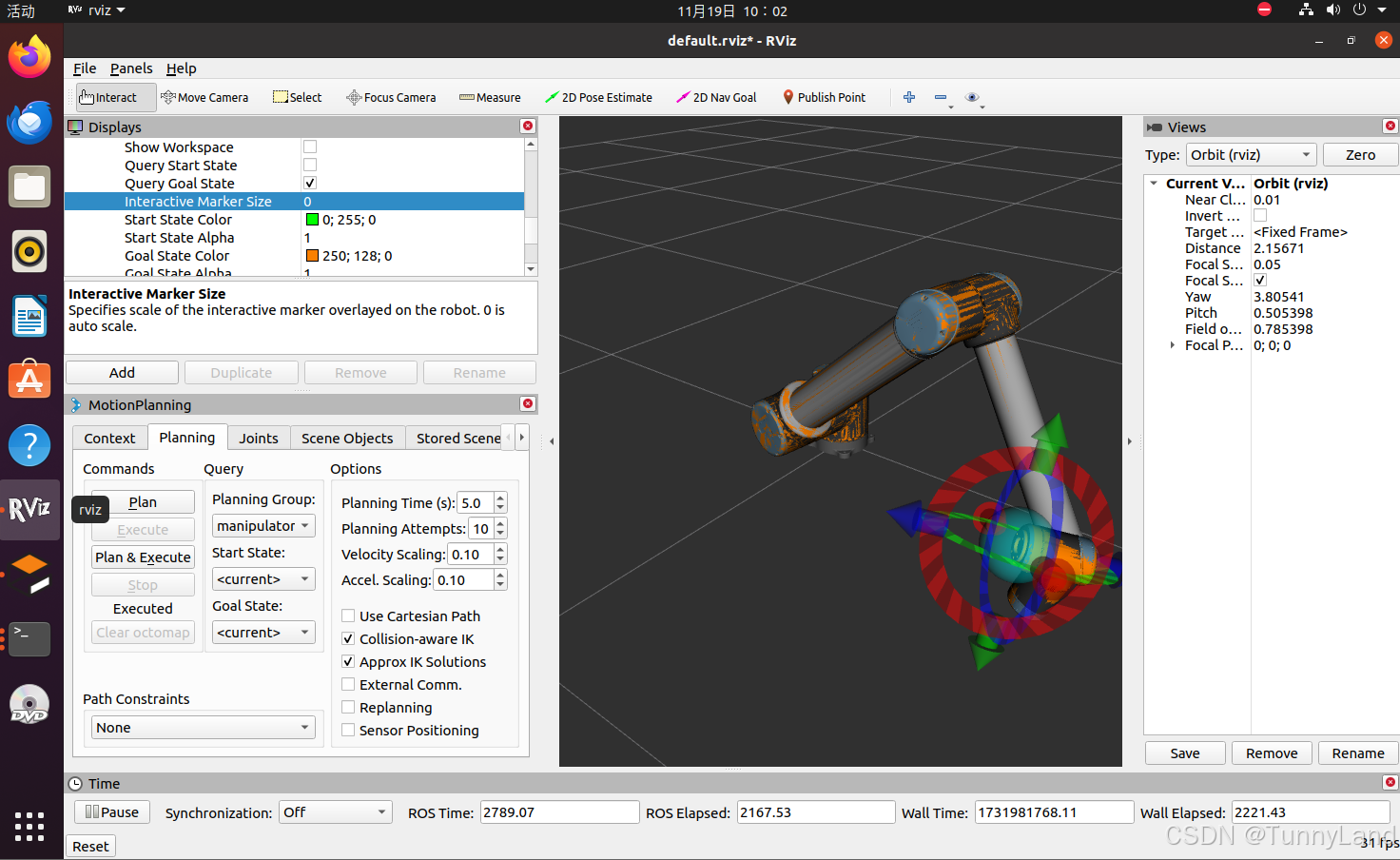
设置问题
Interactive marker出现后却发现无法对其进行拖动,此时需要将RVIZ中的“Approx Ik Solutions”前的勾打上。
Interactive marker size设置为0.2试一下



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









