







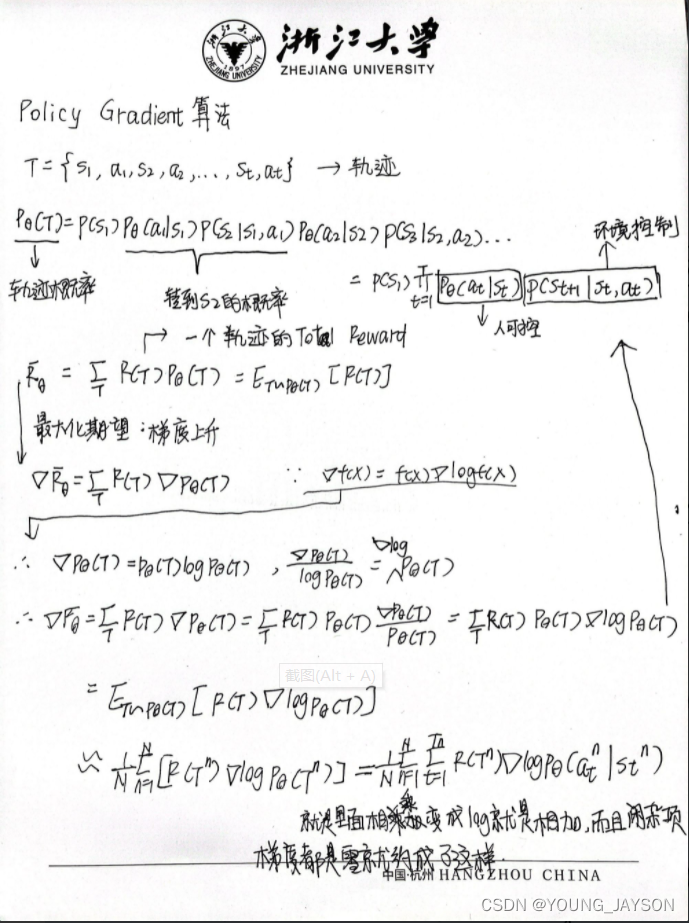
这差不多就是最后的式子了,然后就可以将其带入pytorch的框架里写代码了。
当然还可以继续进行优化,
- 加一个baseline来相减,这样就可以有正有负,更好地去进行优化
- 第二个就是对于一个episode里面如果没有状态都使用 R ( T n ) R(T^n) R(Tn)来是不是很公平的,所以可以采用只算上之后所获得的奖励,也就是说 ∑ k = t T n r k n − b \sum_{k = t}^{T_n}r_k^n-b ∑k=tTnrkn−br
- 接着还可以就是乘上gamma来优化变成了 ∑ k = t T n γ k − t r k n − b \sum_{k = t}^{T_n}\gamma ^{k-t}r_k^n-b ∑k=tTnγk−trkn−b,可以这样简单的理解就是越往后没有那么重要
所以最后的式子如下:
1
N
∑
n
=
1
N
∑
t
=
1
T
n
∑
k
=
t
T
n
(
γ
k
−
t
r
k
n
−
b
)
g
r
a
d
i
e
n
l
o
g
p
θ
(
a
t
n
∣
s
t
n
)
\frac{1}{N}\sum_{n=1}^{N}\sum_{t=1}^{T_n}\sum_{k = t}^{T_n}(\gamma ^{k-t}r_k^n-b)gradien\ logp_{\theta}(a_t^n|s_t^n)
N1n=1∑Nt=1∑Tnk=t∑Tn(γk−trkn−b)gradien logpθ(atn∣stn)
代码实现
import torch
import gym
import argparse
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import torch.optim as optim
from torch.distributions import Categorical
GAMMA = 0.98
env = gym.make("CartPole-v1")
N_ACTION = env.action_space.n
N_STATE = env.observation_space.shape[0]
EPS = np.finfo(np.float32).eps.item() # 非负的最小值,使得归一化时分母不为0
print(N_ACTION,N_STATE)
class Net(nn.Module):
def __init__(self,input,output):
super(Net,self).__init__()
self.net = nn.Sequential(nn.Linear(input,64),nn.Tanh(),nn.Linear(64,output))
def forward(self,x):
x = self.net(x)
return F.softmax(x,dim = 1)
class agent():
def __init__(self) -> None:
self.episode_reward = []
self.net = Net(N_STATE,N_ACTION)
self.probs_log = []
self.optimizer = optim.Adam(self.net.parameters(),lr = 1e-2)
def choose_action(self,state):
state = torch.as_tensor(state).unsqueeze(0)
probs = self.net(state)
m = Categorical(probs)
action = m.sample()
#print(m.log_prob(action))
self.probs_log.append(m.log_prob(action))
#print(action.item())
return action.item()
RL = agent()
TOTAL_EPISODE = 500
render_run = False
for episode in range(TOTAL_EPISODE):
state = env.reset() # 先初始化
total_reward = 0
while True:
a = RL.choose_action(state)
state_,reward,done,info = env.step(a)
if render_run > 50:
env.render()
RL.episode_reward.append(reward)
total_reward += reward
state = state_
#env.render()
if done :
rewards_tmp = []
loss = []
R = 0
for r in RL.episode_reward[::-1]:
R = reward + GAMMA * R
rewards_tmp.insert(0,R)
#进行归一化操作
rewards_tmp = torch.tensor(rewards_tmp)
rewards_tmp = (rewards_tmp - rewards_tmp.mean())/(rewards_tmp.std() + EPS)
#print(len(rewards_tmp))
#print(rewards_tmp)
for log_prob, r in zip(RL.probs_log, rewards_tmp):
loss.append(-log_prob * r) # 损失函数为交叉熵
#for i in range(len(rewards_tmp)):
# loss.append(rewards_tmp[i] * (-RL.probs_log[i]))
RL.optimizer.zero_grad()
loss = torch.cat(loss).sum()
loss.backward()
RL.optimizer.step()
del RL.probs_log[:]
del RL.episode_reward[:]
if total_reward > 400:
render_run += 1
print("the reward of the {}th episode is :{}".format(episode,total_reward))
break
实验结果















 1244
1244











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









