









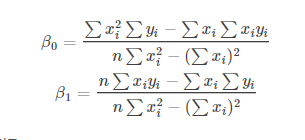
最小二乘法(LSM)
x=[ 0,1,2,3…]
y=[ 2,4,6,8…]
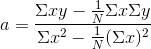

矩阵法公式:

for (int i = 0; i < num; i++)
{
sum_x += x[i],
sum_xx += x[i] * x[i],
sum_y += y[i],
sum_xy += x[i] * y[i];
}
a0 = (sum_x * sum_xx - sum_xy * sum_x) / (sum_xx * area - sum_x * sum_x);
a1 = (sum_y * sum_x - sum_xy * num) / (sum_x * sum_x - sum_xx * num); //
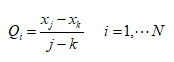
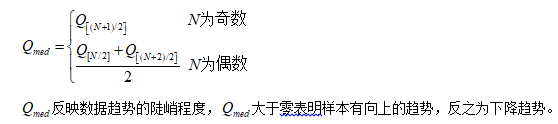
泰尔森估算(Theil–Sen estimator)
两两计算斜率,然后从小到大排序,取中值

//按x从大到小排序,或者[x(t),y(t)],按t排序
sort( [x,y] );
for (int i = 0; i < num; i++) {
x1 =x[i];y1 =y[i];
for (int j = i + 1; j < num; j++) {
x2 = x[j];y2 =y[j];
//分离式
x_delta_histogram[x1 - x2]++; // 加入直方图,方便排序
y_delta_histogram[y1 - y2]++; //
//合并式
//deltaxy_histogram[(y1 - y2)/(x1 - x2)]++;
}
}
mediank= getmid(x_delta_histogram) /getmid(x_delta_histogram)
//mediank= getmid(deltaxy_histogram)
RANSAC算法
RANSAC算法的输入是一组观测数据(往往含有较大的噪声或无效点),它是一种重采样技术(resampling technique),通过估计模型参数所需的最小的样本点数,来得到备选模型集合,然后在不断的对集合进行扩充,其算法步骤为:
- 随机的选择估计模型参数所需的最少的样本点 ( 直线的话就是两个点,圆是三个点)。
- 估计出模型的参数(计算直线或圆方程)。
- 找出在误差内,有多少点适合当前这个模型,并将这些点标记为模型内点
- 如果内点的数目占总样本点的比例达到了事先设定的阈值 ,那么基于这些内点重新估计模型的参数(最小二乘),并以此为最终模型, 终止程序。
- 否则重复执行1到4步。
RANSAC算法是从输入样本集合的内点的随机子集中学习模型。
RANSAC算法是一个非确定性算法(non-deterministic algorithm),这个算法只能得以一定的概率得到一个还不错的结果,在基本模型已定的情况下,结果的好坏程度主要取决于算法最大的迭代次数。
省略重新估计模型版本:
(1)随机从观测点中选择两个点,得到通过该点的直线;
(2)用(1)中的直线去测试其他观测点,由点到直线的距离确定观测点是否为局内点或者局外点;
(3)如果局内点足够多,并且局内点多于原有“最佳”直线的局内点,那么将这次迭代的直线设为“最佳”直线;
(4)重复(1)~(3)步直到找到最佳直线。
直线估计:
maxnum=0;
bestline;
//最大迭代50次
for(int c=0;c< 50;c++)
{
//随机索引
idx1= get_randon();
idx2= get_randon();
innum=2;//内点数量
//计算直线参数
line= calculate(point[idx1] , point[idx2]);
inpoints=[];
for(int i=0;i< num;i++)
{
if((i!=idx1)&&(i!=idx2))
{
//计算距离
disdance = pointdis(line,point[i]);
if(disdance < threshold)
{
innum++;
inpoints=[inpoints,point[i]];//将该点加入内点队列
}
}
}
//找到n次迭代的最佳直线
if(innum > maxnum)
{
bestline= line;
}
if(innum > numthreshold)
{
//重新计算直线参数
bestline= calculate_line(inpoints[]);
break;
}
}
return bestline;
其中两点计算直线方程如下:
//(如果直线为y=ax+b形式,则C为Nan;如果直线为x=c形式,则A和B为Nan)
calculate(PointF p1, PointF p2)
{
if (p1.X == p2.X)
{
A = NaN;
B = NaN;
C = p1.X;
}
else
{
A = 1d * (p1.Y - p2.Y) / (p1.X - p2.X);
B = p1.Y - A * p1.X;
C = NaN;
}
}
计算点到直线的距离:
double pointdis(LineF line,PointF p)
{
double d = 0d;
if (line.C = NaN)
{
//y=ax+b相当于ax-y+b=0
d = abs(1d * (line.A * p.X - p.Y + line.B) / Sqrt(line.A * line.A + 1*1));
}
else
{
d = abs(C - p.X);
}
return d;
}
圆估计:
maxnum=0;
bestcircle;
//最大迭代50次
for(int c=0;c< 50;c++)
{
//随机索引
idx1= get_randon();
idx2= get_randon();
idx3= get_randon();
innum=2;//内点数量
//计算圆参数
circle= calculate(point[idx1] , point[idx2], point[idx2]);
inpoints=[];
for(int i=0;i< num;i++)
{
if((i!=idx1)&&(i!=idx2)&&(i!=idx3))
{
//计算距离
disdance = pointdis(circle,point[i]);
if(disdance < threshold)
{
innum++;
inpoints=[inpoints,point[i]];//将该点加入内点队列
}
}
}
//找到n次迭代的最佳圆
if(innum > maxnum)
{
bestcircle= circle;
}
if(innum > numthreshold)
{
//重新计算圆参数
bestcircle= calculate_line(inpoints[]);
break;
}
}
return bestline;
其中点到圆的距离为:
double pointdis(PointF p)
{
return abs(Cr - Sqrt( Pow(p.X - Cx, 2) + Pow(p.Y - Cy, 2)));
}
三点构造圆的方程:
void calculate(PointF p1,PointF p2,PointF p3)
{
float xMove = p1.X;
float yMove = p1.Y;
p1.X = 0;
p1.Y = 0;
p2.X = p2.X - xMove;
p2.Y = p2.Y - yMove;
p3.X = p3.X - xMove;
p3.Y = p3.Y - yMove;
float x1 = p2.X, y1 = p2.Y, x2 = p3.X, y2 = p3.Y;
float m = 2.0 * (x1 * y2 - y1 * x2);
if (m == 0)
throw new ArgumentException("参数错误,提供的三点不能构成圆。");
float x0 = (x1 * x1 * y2 - x2 * x2 * y1 + y1 * y2 * (y1 - y2)) / m;
float y0 = (x1 * x2 * (x2 - x1) - y1 * y1 * x2 + x1 * y2 * y2) / m;
Cr = Sqrt(x0 * x0 + y0 * y0);
Cx = x0 + xMove;
Cy = y0 + yMove;
}















 2022
2022











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









