







似然函数
概率表示为:P(x|θ)
是条件概率的表示方法,θ是前置条件,理解为在θ 的前提下,事件 x 发生的概率
似然表示为:L(x|θ)
理解为已知结果为 x ,参数为θ (似然函数里θ 是变量,这里说的参数是相对与概率而言的)对应的概率,即
两者在数值上相等,但是意义并不相同。L(x|θ)是关于 θ 的函数,而P(x|θ) 则是关于 x 的函数,两者从不同的角度描述一件事情。
以伯努利分布(Bernoulli distribution,又叫做两点分布或0-1分布)为例:
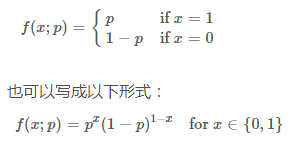
这里注意区分f(x;p) 与前面的条件概率的区别,引号后的 p 仅表示 f 依赖于 p 的值,p 并不是 f 的前置条件,而只是这个概率分布的一个参数而已,也可以省略引号后的内容。
从似然的角度出发,假设我们观测到的结果是 x=0.5x=0.5(即某一面朝上的概率是50%,这个结果可能是通过几千次几万次的试验得到的,总之我们现在知道这个结论),可以得到以下的似然函数: 

与概率分布图不同的是,似然函数是一个(0, 1)内连续的函数,所以得到的图也是连续的,我们很容易看出似然函数的极值(也是最大值)在 p=0.5 处得到,通常不需要做图来观察极值,令似然函数的偏导数为零即可求得极值条件。
ps. 似然函数里的 p 描述的是硬币的性质而非事件发生的概率(比如 p=0.5 描述的是一枚两面均匀的硬币)。
让我们回到似然的定义,似然描述的是结果已知的情况下,该事件在不同条件下发生的可能性,似然函数的值越大,说明该发生事件的条件为p的可能性越大。
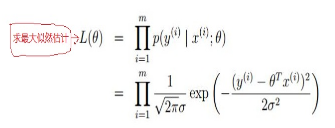
涉及到多个独立事件,在似然函数的表达式中通常都会出现连乘:
对多项乘积的求导往往非常复杂,但是对于多项求和的求导却要简单的多,对数函数不改变原函数的单调性和极值位置,而且根据对数函数的性质可以将乘积转换为加减式,这可以大大简化求导的过程:

似然函数:https://blog.csdn.net/u014182497/article/details/82252456
高斯分布
位置参数为μ、尺度参数为 σ
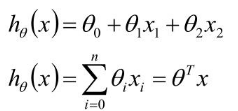
线性回归
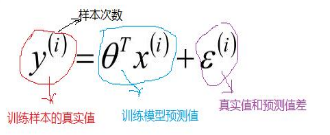
根据中心极限定律可以得到 ε 满足高斯分布的,u =0。
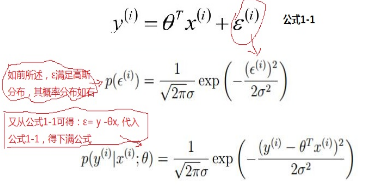

阶段性的总结:线性回归,根据大数定律和中心极限定律假定样本无穷大的时候,其真实值和预测值的误差ε 的加和服从u=0,方差=δ²的高斯分布且独立同分布,然后把ε =y-Øx 代入公式,就可以化简得到线性回归的损失函数。
第一种解法:

必须要满足可逆条件
第二种:梯度下降
逻辑回归

函数h(x)的值有特殊的含义,它表示结果取1的概率,因此对于输入x分类结果为类别1和类别0的概率分别为:
(1)综合起来:

取似然函数:

取对数:

转化为梯度下降:
参考:https://blog.csdn.net/pakko/article/details/37878837
LR的归一化
值得一提的是求解LR模型过程中,每一个数据点对分类平面都是有影响的,它的影响力远离它到分类平面的距离指数递减。换句话说,LR的解是受数据本身分布影响的。在实际应用中,如果数据维度很高,LR模型都会配合参数的L1 regularization。
要说有什么本质区别,那就是两个模型对数据和参数的敏感程度不同,Linear SVM比较依赖penalty的系数和数据表达空间的测度,而(带正则项的)LR比较依赖对参数做L1 regularization的系数。但是由于他们或多或少都是线性分类器,所以实际上对低维度数据overfitting的能力都比较有限,相比之下对高维度数据,LR的表现会更加稳定,为什么呢?
因为Linear SVM在计算margin有多“宽”的时候是依赖数据表达上的距离测度(可以理解为度量标准,即在什么样的标准上计算gap的大小)的,换句话说如果这个测度不好(badly scaled,这种情况在高维数据尤为显著),所求得的所谓Large margin就没有意义了,这个问题即使换用kernel trick(比如用Gaussian kernel)也无法完全避免。所以使用Linear SVM之前一般都需要先对数据做normalization,(这里的normalization是对数据的归一化,注意区分之前的LR在类别不平衡的时候做的balancing)而求解LR(without regularization)时则不需要或者结果不敏感。
同时会有:feature scaling会使得gradient descent的收敛更好。
如果不归一化,各维特征的跨度差距很大,目标函数就会是“扁”的:

(图中椭圆表示目标函数的等高线,两个坐标轴代表两个特征)
这样feature scaling之后,在进行梯度下降的时候,梯度的方向就会偏离最小值的方向,走很多弯路。
如果归一化了,那么目标函数就“圆”了:

每一步梯度的方向都基本指向最小值,可以大踏步地前进。















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









