







1.完成进度状况
本周为第十周,按照任务书的进度安排应该已经实现了圆形标记点的粗定位工作,并研究圆形标记点精定位算法。
目前,已经成功地实现了基于分水岭算法的圆轮廓的提取以及两组对照组基于Hough变换圆检测以及基于斑点圆检测的圆形标记点粗定位工作。
对于圆形标记点精测定位算法的大致思路为:采用边缘特征拟合的方法。首先进行边缘检测,然后提取标记点边缘像素,最后采用最小二乘拟合法,得到标记点的圆心的精确坐标。
2.对传统算法理论的理解程度及见解 ;3.算法实现过程是否清晰,完成情况及见解
**基于分水岭算法的圆形标记**
1.用filter2D和拉普拉斯算子实现图像对比度提高(锐化增强图像);
2.转换为二值图像(threshold); //图像预处理
3.距离变换
4.对距离变换结果进行归一化到[0~1]之间(归一化提高计算精度)
5.使用阈值,再次二值化,得到标记
6.腐蚀得到每个peak-erode(使目标区域范围缩小,造成图像的边界收缩,消除小且无意义的目标物)
7.发现轮廓-findContours
8.绘制轮廓-drawContours/circle
9.分水岭变换-watershed
10.canny算子提取圆轮廓
filter2D实现矩阵掩码:空间域图像滤波,利用一个矩阵核(Kernel)对一个小区域进行操作,目的是将图像增强;
OpenCV中的fiflter2D函数实现图像的卷积运算.
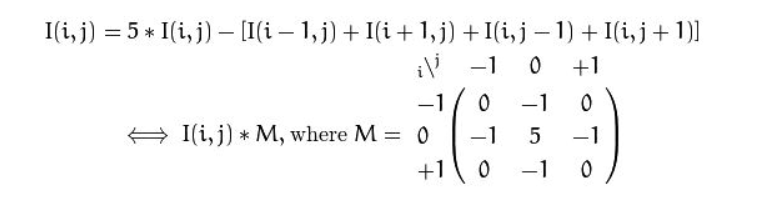
Laplace算子:空间锐化滤波 二阶微分算子
距离变换将输入的二值图变换为高级灰度图,即距离变换图像,图像中每个像素的灰度值为该像素与距其最近的背景像素间的距离。
传统的分水岭分割算法的基本思想:
将图像看作是测地学上的拓扑地貌,图像中每一像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆地,而集水盆地的边界则形成分水岭。分水岭的概念和形成可以通过模拟浸入过程来说明。在每一个局部极小值表面,刺穿一个小孔,然后把整个模型慢慢浸人水中,随着浸入的加深,每一个局部极小值的影响域慢慢向外扩展,在两个集水盆汇合处构筑大坝如下图所示,即形成分水岭。
基于梯度图像的直接分水岭算法容易导致图像的过分割,产生这一现象的原因主要是由于输入的图像存在过多的极小区域而产生许多小的集水盆地,从而导致分割后的图像不能将图像中有意义的区域表示出来。所以必须对分割结果的相似区域进行合并。

基于标记点的分水岭算法的原理: 对图像中部分像素做标记,表明它的所属区域是已知的。分水岭算法可以根据这个初始标签确定其他像素所属的区域。
**基于hough变换圆检测**
1.灰度化、二值化、高斯滤波 //图像预处理
2.Hough圆变化-houghCircles
3.绘制轮廓,提取圆心-circle
**斑点检测**
1.灰度化、二值化 //图像预处理
2.斑点检测-SimpleBlobDetector::Params
3.绘制轮廓与圆心-drawKeypoints
4.中间结果演示及功能调试完成情况、对比传统算法的创新点、代码的行数
对比传统算法的创新点
1.对传统的分水岭算法进行改进提出基于标记点的分水岭算法 基于梯度图像的直接分水岭算法容易导致图像的过分割,产生这一现象的原因主要是由于输入的图像存在过多的极小区域而产生许多小的集水盆地,从而导致分割后的图像不能将图像中有意义的区域表示出来。所以必须对分割结果的相似区域进行合并。
















 6394
6394











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











