







由于OTSU比较简单,就是一个遍历来寻找最大的阈值分割的灰度值点,故本例直接给出代码,不做细评,代码如下,具体的写在代码注释
#include <iostream>
#include <opencv2/opencv.hpp>
#include <Eigen/Dense>
#include <math.h>
#include <stack>
#define _MATH_DEFINES_DEFINED
using namespace std;
using namespace cv;
using namespace Eigen;
float Otsu(const Mat& image,int T)
{
int nr = image.rows;
int nl = image.cols;
Mat hist = Mat::zeros(1, 256, CV_32F);
float* hi = hist.ptr<float>(0);
float junzhi=0;//定义总均值,类一均值,类二均值
float junzhi0 = 0;
float junzhi1 = 0;
float lei0 = 0;//定义类一,类二的概率
float lei1 = 0;
float fangcha0=0;//定义类一,类二的方差
float fangcha1 = 0;
float neifangcha = 0;//定义类内方差
float jianfangcha = 0;//定义类间方差
float zongfangcha = 0;//定义总方差,类内加类间
float ppppp = 0;
for (int i = 0; i < nr; i++)//这里是统计直方图
{
const float* im = image.ptr<float>(i);
for (int j = 0; j < nl; j++)
{
hi[int(im[j])] = hi[int(im[j])] +1;
}
}
//cout << hist << endl;
for (int i = 0; i < 256; i++)//计算均值
{
junzhi = i * hi[i] / nr / nl;
}
for (int i = 0; i <= T; i++)//计算
{
lei0 = lei0 + hi[i] / nr / nl;
}
for (int i = T+1; i <256; i++)
{
lei1 = lei1 + hi[i] / nr / nl;
}
for (int i = 0; i <= T; i++)
{
junzhi0 = junzhi0 + i * hi[i] / nr / nl / lei0;
}
for (int i = T + 1; i < 256; i++)
{
junzhi1 = junzhi1 + i * hi[i] / nr / nl / lei1;
}
for (int i = 0; i <= T; i++)
{
fangcha0 = fangcha0 + (i -junzhi0)* (i - junzhi0) * hi[i] / nr / nl / lei0;
}
for (int i = T + 1; i < 256; i++)
{
fangcha1 = fangcha1 + (i - junzhi1) * (i - junzhi1) * hi[i] / nr / nl / lei1;
}
neifangcha = lei0 * fangcha0 + lei1 * fangcha1;
jianfangcha = lei0 * lei1 * (junzhi1 - junzhi0) * (junzhi1 - junzhi0);
zongfangcha = neifangcha + jianfangcha;
ppppp= jianfangcha / zongfangcha;
return ppppp;
}
int getT(const Mat& image, Mat& new_image)
{
int temp = 0;
float max = 0;
max = Otsu(image, 20);
for (int i = 0; i < 255; i++)
{
float gg = Otsu(image, i);
if (max < gg)
{
temp = i;
max =gg;
}
}//遍历得到最大的分割点temp
for (int i = 0; i < image.rows; i++)
{
const float* im =image.ptr<float>(i);
float* p = new_image.ptr<float>(i);
for (int j = 0; j < image.cols; j++)
{
float ge = im[j];
if (ge <= temp)
{
p[j] = 0;
}
else
{
p[j] = 255;
}
}
}//图像进行二值化
return temp;
}
int main()
{
Mat image = imread("I:/C.jpg", IMREAD_GRAYSCALE);
imshow("原图", image);
Mat IM;
image.convertTo(IM, CV_32F);
//imshow("fsSSd", IM);
Mat new_image = Mat::zeros(IM.rows, IM.cols, CV_32F);
int T = getT(IM, new_image);
cout << T << endl;
imshow("分割以后", new_image);
cv::waitKey(0);
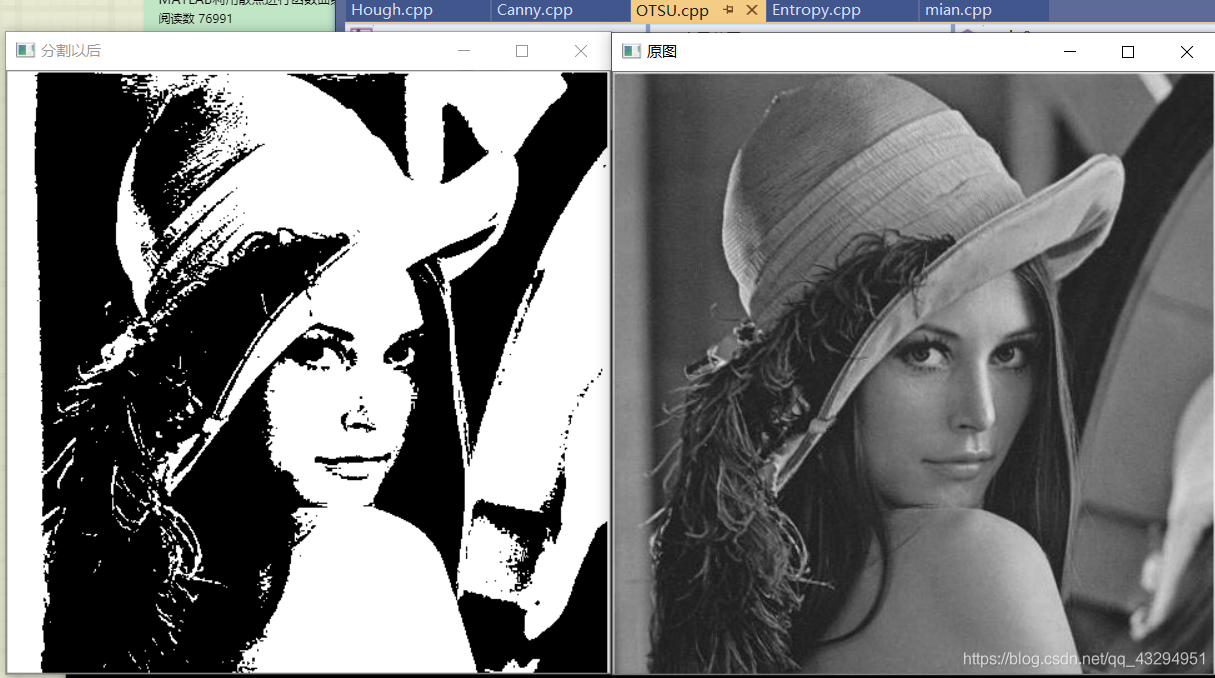
}ok,得到的阈值分割图如下,感觉海星















 1398
1398











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









