









![]()
(以下笔记来自阅读上面的论文)
1.载波相位观测值与测码伪距观测值所受到的电离层延迟大小相等、符号相反
2.GNSS卫星导航定位中的各种坐标系:
- 地心惯性坐标系
- 地心地固坐标系
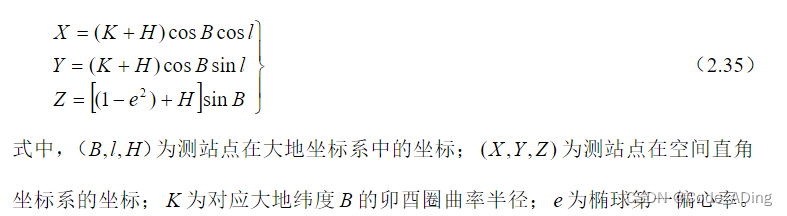
- 空间直角坐标系(X Y Z)
- 大地坐标系(B L H)
- 两者相互转换:
- 星固坐标系统
- 站心坐标系(E N U)
3.在进行多系统组合定位时,要考虑时空基准和坐标基准的统一:
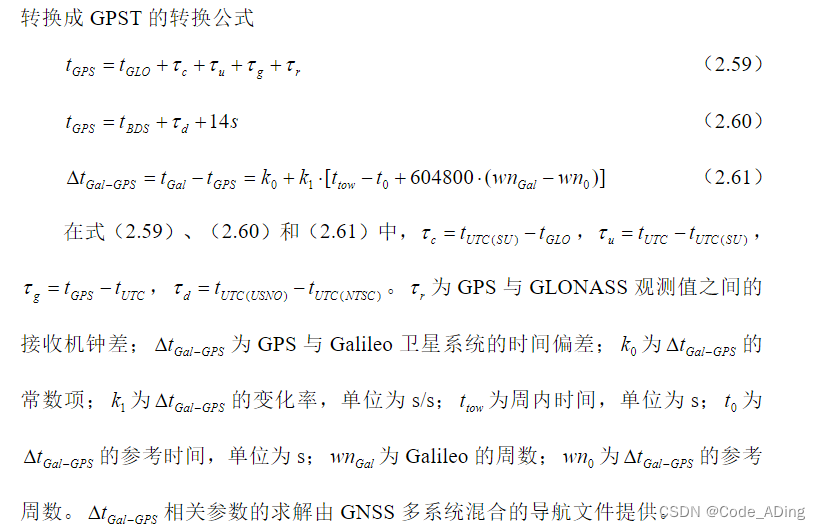
时间基准:BDS 采用 BDT,GPS 采用 GPST,GLONASS 采用 GLONASST,Galileo 采用 GST。4 种时间系统都与国际原子时(TAI)和世界协调时(UTC)存在密切联系,故可以将其他3 系统卫星的时间系统统一到 GPS 的时间系统下,即可实现时间系统的转换和统一。
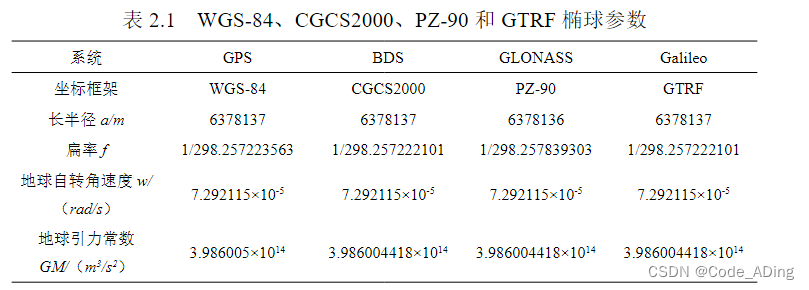
坐标基准:BDS 所采用的坐标系统为 CGCS2000 坐标系,GPS 采用 WGS-84 坐标系,GLONASS 采用 PZ-90 坐标系,GALILEO 采用 GTRF 坐标系。鉴于 WGS-84 坐标系目前已经较为成熟且被广泛使用,所以考虑将其他系统的坐标统一至 WGS-84 坐标系。
不管各系统转换成哪一种时间基准和坐标基准,最终都要统一类型。
4.精密单点定位使用的是精密的卫星钟差、卫星星历和轨道产品,IGS 中心提供了参考框架一致的 GNSS多卫星系统融合精密轨道产品,因此在进行GNSS多系统组合精密单点定位数据处理过程中无需进行坐标系统转换。
5.精密单点定位函数模型:
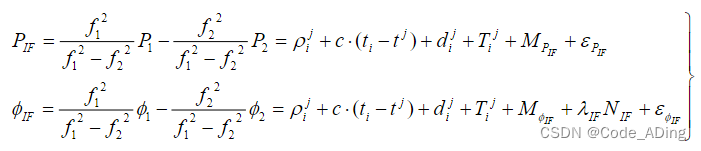
- 无电离层组合函数模型(最为常用)
- 方程:
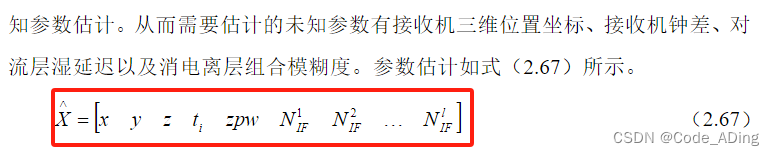
- 参数估计
- 设某一历元卫星可用数为 n 颗,那么观测方程数为 n2 ,未知参数个数为n5 ,因此初始化历元至少需要 5 颗可用卫星才能进行所有参数估计
- 目前,在双频 PPP 中通常只考虑一阶电离层的影响,很难获得高精度的定位结果。对于质量较好的 GNSS 接收机,测码伪距观测值和载波相位观测值噪声大约为 30cm 和 2mm,消电离层组合后其观测值噪声被放大约 3 倍。测码伪距观测值和载波相位观测值在 GNSS 精密单点定位中有着不同的地位,测码伪距观测值的误差大小影响坐标解算的收敛时间,而载波相位观测值的误差大小决定坐标解算收敛后的精度。
- 方程:
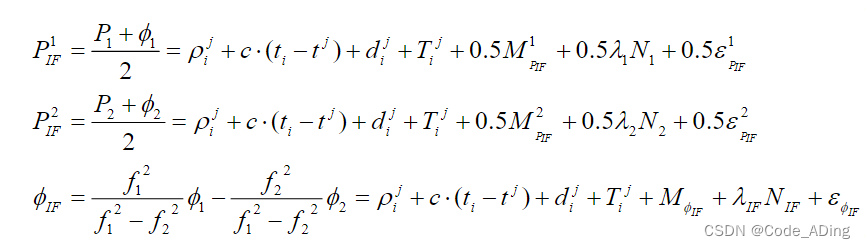
- Uofc模型
- 利用测码伪距观测值和载波相位观测值的电离层延迟大小相等,符号相反这一特性;包含了一个无电离层相位组合、两个码和相位的半和组合观测值
- 观测方程:
- 参数估计
- 设某一历元卫星可用数为 n 颗,那么观测方程数为 3n,未知参数个数为5+2n,因此初始化历元至少需要 5 颗可用卫星才能进行所有参数估计
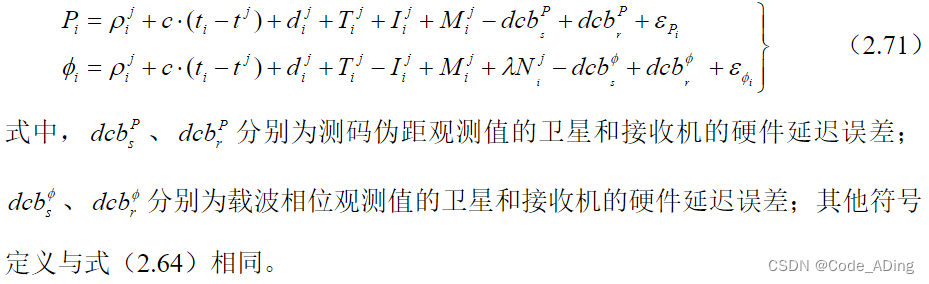
- 非组合模型
- 在无电离层组合观测值的基础上,特别考虑卫星和接收机的硬件延迟误差
- 观测方程:
- 在非组合模型中,伪距观测方程中的卫星和接收机的硬件延迟误差可通过 IGS 中心提供的 DCB 产品进行改正,载波相位观测方程中的卫星和接收机的硬件延迟误差分别被电离层延迟、接收机钟差和模糊度参数吸收。因此,非组合模型中的模糊度参数不再具有整数特性。
- 参数估计
- 这里为什么只需要计算1频段上的电离层延迟就够了, 2频段上的电离层延迟是可以通过其公式算出来吗?
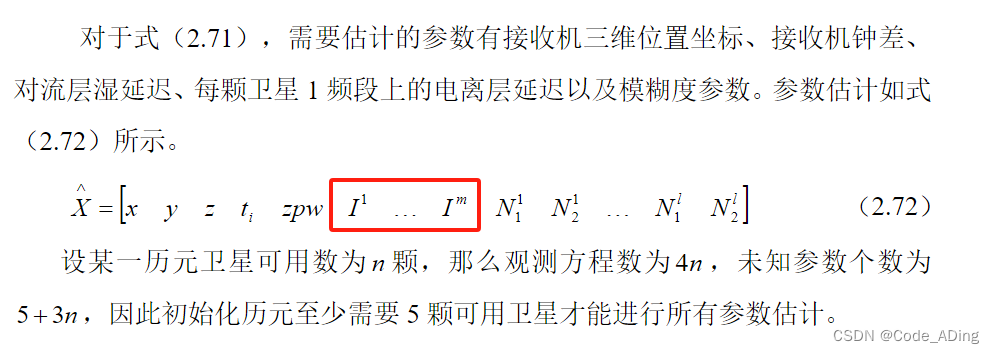
- 设某一历元卫星可用数为 n 颗,那么观测方程数为 n4 ,未知参数个数为n35 ,因此初始化历元至少需要 5 颗可用卫星才能进行所有参数估计
- 相比无电离层组合模型,避免了观测值线性组合后观测噪声和多路径误差被放大的问题,同时,直接对电离层延迟误差进行估计

6.精密单点定位中,对流层延迟误差的处理,采取的做法是对对流层干分量采用模型改正,而对流层湿分量当做未知参数进行估计。
7.精密钟差产品中已经包含卫星的硬件延迟,卫星的硬件延迟在采用无电离层组合定位时被抵消。伪距观测方程和载波相位观测方程中接收机的硬件延迟误差在参数估计时分别被接收机钟差参数和模糊度参数吸收。因此,在无电离层组合模型中,观测方程中并没有硬件延迟误差这一项。
8.观测值随机模型(方差阵,误差阵)
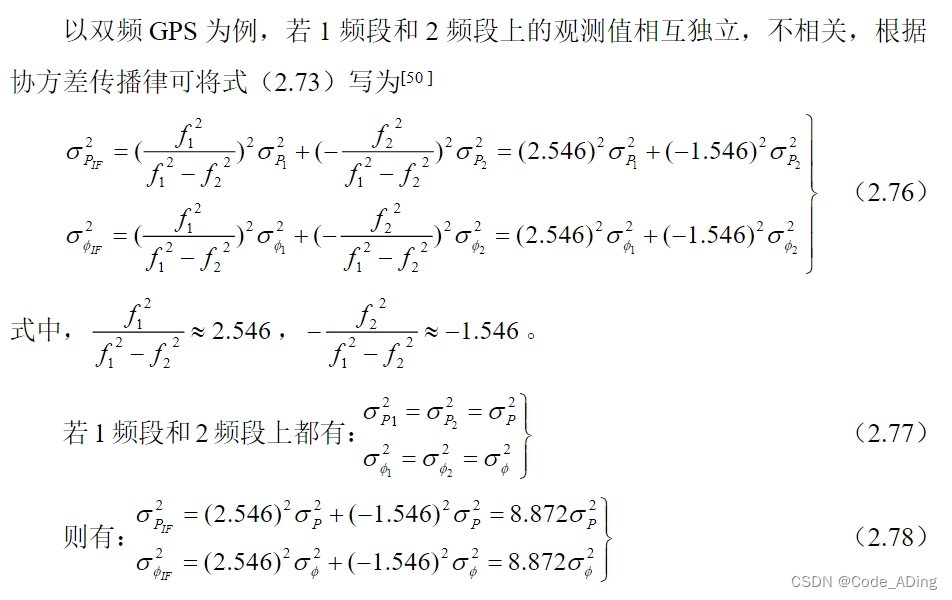
- 无电离层组合随机模型
- 无电离层组合后测码伪距观测值与载波相位观测值之间不具有相关性,观测值方差阵为对角阵
- 运用协方差传播定律:
- 无电离层组合后测码伪距观测值与载波相位观测值之间不具有相关性,观测值方差阵为对角阵
- Uofc随机模型
- 这个用的不多,先不看了
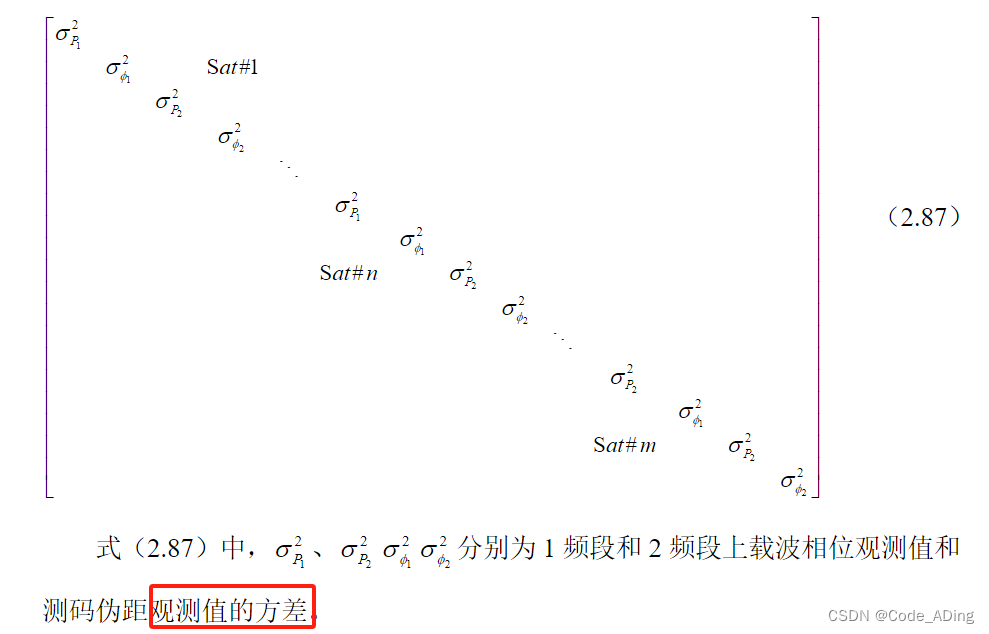
- 非组合随机模型(重点)
- 非组合模型的测码伪距观测值和载波相位观测值之间是相互独立的
9.PPP随机模型(定权 确定方差阵、权阵)
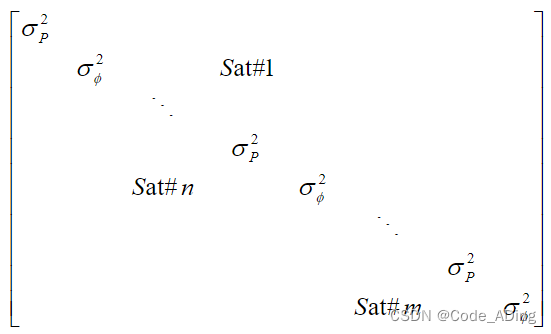
- 等权随机模型
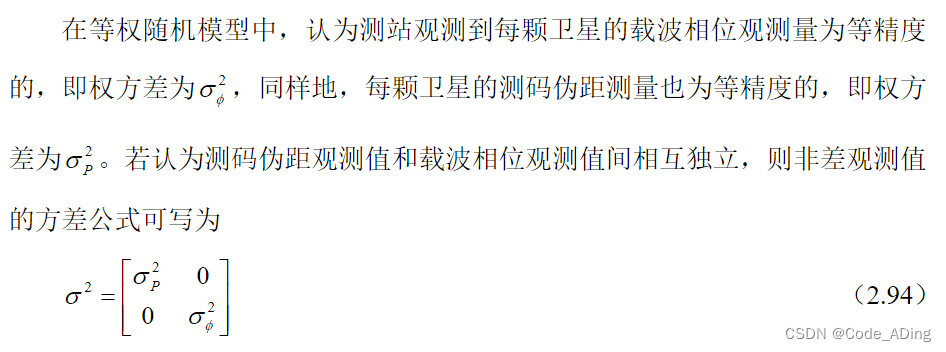
- 方法:伪距观测值和载波观测值相互独立,每颗卫星的载波观测值等精度,每颗卫星的伪距观测值等精度
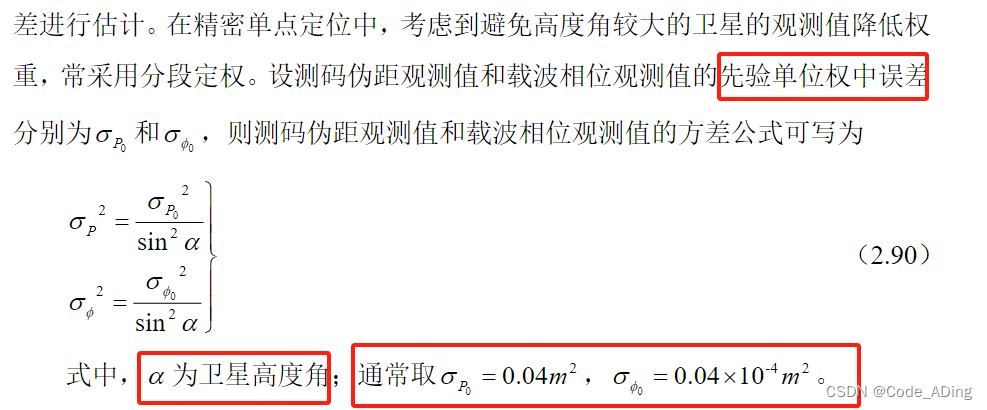
- 基于高度角随机模型
- 低高度角,观测值噪声较大且多路径效应影响较为严重;需要定权,降低低高度角卫星的权重
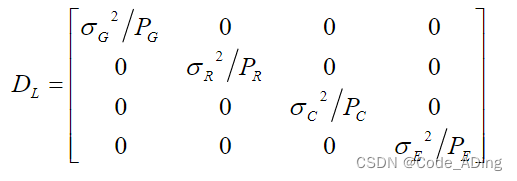
- 1.求出在某个历元一个GPS卫星的观测值方差-协方差阵,然后进而得到所有GPS卫星的观测值方差-协方差阵,进而得到其他导航系统(GLONASS、BDS、Galieo)的观测值方差-协方差阵;2.考虑到不同系统的观测值精度各异,需要合理确定不同系统间观测值的权重,精密单点定位中确定随机模型采用方差—协方差分量估计方法(主要有Helmert 方差分量估计法、BIQUE 法、MINQUE 法和极大似然估计法等),该文采取 Helmert 方差分量估计 方 法 确 定 GPS 、 GLONASS 、 BDS 和 Galileo 观 测 值 权 比:

- 进而得到所有卫星的方差-协方差阵:(方差越小越好)
- 基于信噪比的随机模型
- 信噪比(Signal to Noise Ratio,SNR)是指信号强度与噪声强度之间的比值
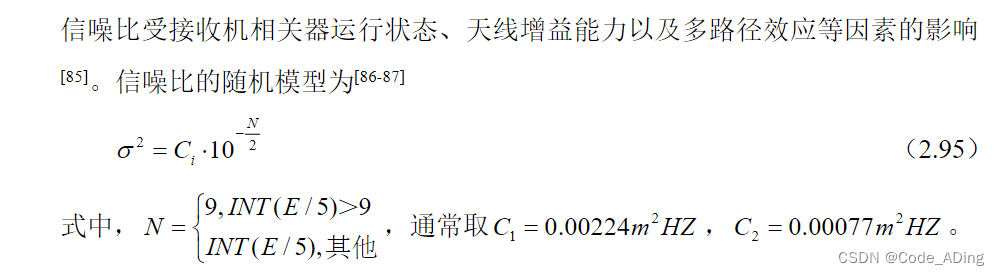
- 没看太懂这个公式 N 是怎么算的,INT是什么,E是什么,这些值从哪里来?


















 3098
3098

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











