







PPP经典必读硕博论文,主要是重新回顾相关知识点,总结一下学习笔记、学习感悟。
12.3
1.
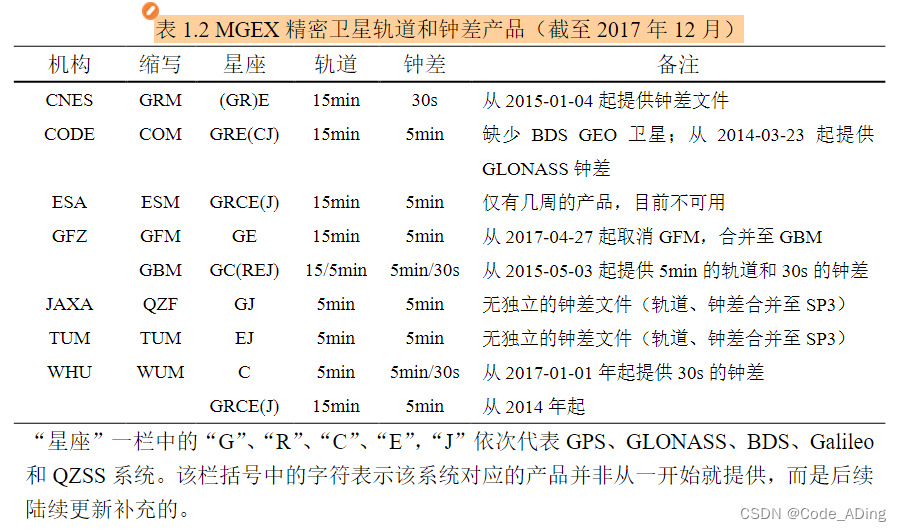
2.MGEX:多系统 GNSS 实验、Multi-GNSS Experiment,是IGS下的一项计划,用于布设MGEX跟踪站网,与现有的IGS跟踪站网一起组成全球站网。
MGEX 分析中心可向全球用户提供多系统 GNSS 精密卫星轨道和钟差改正等产品。目前,共有 7 个,分别是:(1)法国空间研究中心(Centre National d’EtudesSpatiales, CNES);(2)欧洲定轨中心(CODE);(3)德国地学研究中心(DeutschesGeoForschungsZentrum, GFZ);(4)德国慕尼黑工业大学(Technische UniversitätMünchen, TUM);(5)中国武汉大学(Wuhan University, WHU);(6)日本宇航空间探测局(Japan Aerospace Exploration Agency, JAXA);(7)欧洲空间局(European Space Agency, ESA)。
3.基于非差非组合观测值的PPP相比于传统无电离层组合观测值的PPP,优点是:
- 在处理当前和未来的GNSS观测值时更有弹性,弹性? 是指因为是非差非组合,后续进行处理时比较方便吗?存疑
- 避免了线性组合噪声放大
- 能够提取电离层延迟,获取精确的电离层延迟改正信息,可以利用外部电离层改正信息来约束非差非组合 PPP 中的电离层参数用以加快收敛
4.定位模型包括随机模型和函数模型。函数模型描述了观测量与相应的待估参数之间的函数关系,随机模型则反应了观测值的统计特性。定位模型的构建是获得最优解的关键前提。
5.本文给了四种函数模型:
- 原始观测模型
- 无电离层组合函数模型
- UofC模型
- 非差非组合函数模型
- 对原始观测模型进行处理就得到了非差非组合函数模型
- 引入精密卫星轨道和钟差改正,代入至原始观测方程并线性化
- 将接收机钟差、电离层延迟、载波相位模糊度参数重新参数化,得到非差非组合函数模型

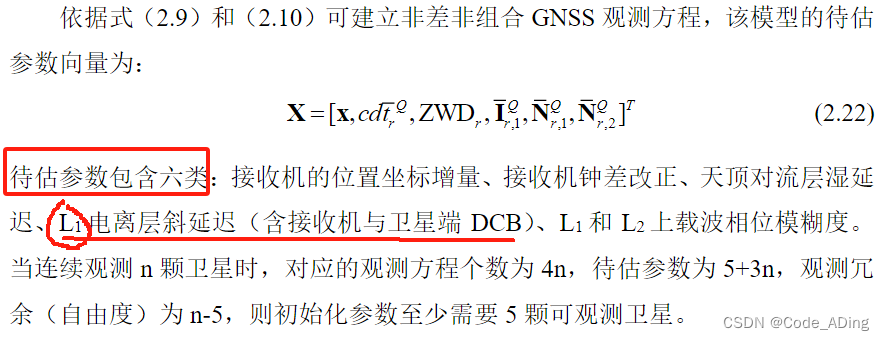
- 对原始观测模型进行处理就得到了非差非组合函数模型
6.PPP中通过模型改正的误差项有哪些:
- 卫星和接收机天线相位中心误差
- 测站对流层天顶干延迟
- 相对论效应
- 潮汐负荷形变(固体潮、极移和海潮)
- 萨奈克效应(Sagnac effect)
- 卫星相位缠绕
- ...
7.一些名词:
- UCD :单位是s,频率相关的接收机和卫星端的非校正伪距硬件延迟 uncalibrated code delay
- UPD:单位是周,频率相关的接收机和卫星端的非校正相位硬件延迟 uncalibrated phase delay
- DCB:Differential Code Bias 差分码偏差 不同信号得到的观测值之间存在的系统性偏差
8.参数估计方法
- 最小二乘法
- 卡尔曼滤波
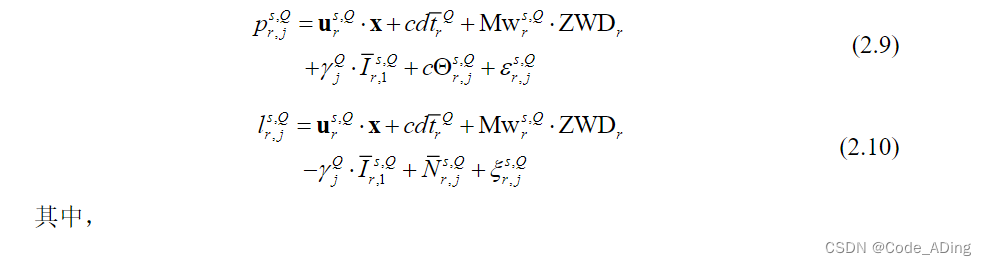
9.观测模型 (以非差非组合双频接收机为例)


- 这里就是电离层延迟,L1和L2频率上的电离层延迟比例



- 这里给出的是观测值(伪距和相位)的噪声矩阵,方差阵,由卫星高度角或者信噪比随机模型确定
10.状态模型
- (有点懂了
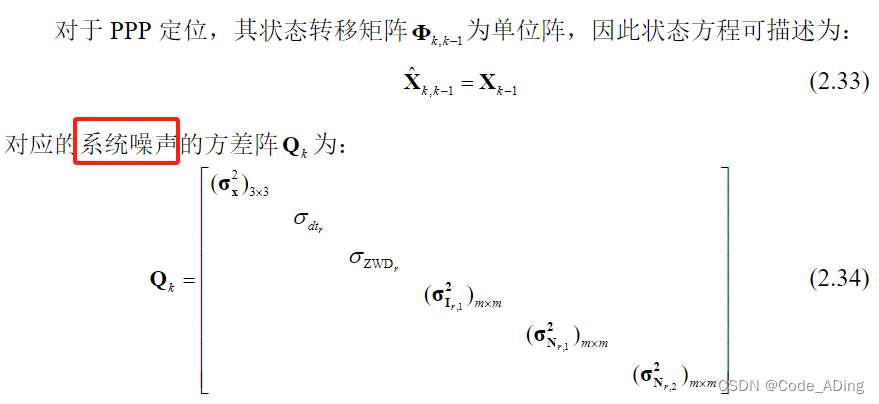
- 这里的系统噪声是那些代求参数的噪声方差阵,只能先设置初始值


11.有个疑问,为什么在观测方程中只是用L1频率来计算电离层延迟,而不是使用L2频率?
这里我搜了一下:看到有位博主是说:选择L1算,就可以根据电离层延迟频率间的关系得到其他频率的电离层延迟。L1和L2的电离层可以用相应关系反求出来。(上面已经写出来了,当时先写的这边,忘了)
原文链接:RTKlib单点定位-部分思考_rtklib bds-CSDN博客
12. 数据预处理和质量控制
- 该部分工作应该在参数估计前进行
- 主要包括:
- 伪距观测值粗差检测
- 构造粗差检测量
- 载波相位观测值周跳探测
- GF法 / MW组合观测值法
- 接收机钟跳探测与修复
- 一旦接收机发生钟跳,将破坏 GNSS 时标、伪距和载波相位观测值之间的一致性
- 抗差卡尔曼滤波
- 抗差 Kalman 滤波通过构造等价权对含有小周跳或粗差的观测值进行控制,降低异常观测值对于参数估计的影响
- 伪距观测值粗差检测
13.实时 PPP 处理流程图
















 945
945











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











