







论文基本信息
《Dynamic-Detection-Based Trajectory Planning for Autonomous Underwater Vehicle to Collect Data From Underwater Sensors》
《基于动态探测的自主水下航行器采集水下传感器数据的轨迹规划》
Published in: IEEE Internet of Things Journal ( Volume: 9, Issue: 15, 01 August 2022)


摘要
海洋科学和水下物联网的应用主要依赖于从水下传感器收集数据。利用远程水下声通信收集数据,在由电池供电的水下传感器节点上消耗大量能量。为了实现低能耗,我们可以使用自主水下航行器(AUV)靠近传感器节点,并利用短程和高速率通信。大多数现有的基于AUV的数据收集方案都考虑了具有节点位置知识的场景,其中巡航轨迹可以在AUV离开之前计算出来。这些方案不能用于某些情况,如对没有位置信息的特定海域的海龟跟踪。为此,我们首先提出了一种计划-同时检测的方法来动态检测海龟上的传感器,并调整AUV的巡航方向来收集数据。为了进一步提高AUV能量限制下的数据效率,我们利用检测方向对能够共享相同轨迹的传感器进行了分组。然后提出了一种基于分组的动态轨迹规划(GDTP)来确定下一个巡航方向,可以访问数据量最大的巡航能量最小的传感器组。仿真结果表明,GDTP在动态场景下的数据采集效率明显高于现有的轨迹规划算法,且随着通信范围的增加,其在节点位置上的性能甚至优于现有的算法。
1.引言
海洋覆盖了地球70%的面积以上,而只有5%的海洋已经被人类探索过。这个未被充分开发的海洋已经引起了人类越来越多的关注和兴趣。数据科学的最新发展为海洋研究引入了一种新的范式,以获得更多关于海洋[1]的知识。因此,对于海洋科学和水下物联网(IoUT)应用[2]来说,数据获取比以往任何时候都更加重要。
IoUT的应用依赖于部署水下传感器来感知水下环境参数(如温度、盐度、深度、声学多普勒电流分析仪等)。有两种基本的方法可以用来从传感器上无线收集数据。一种方法是允许传感器直接或通过多跳转发[3]向水面上的水池报告其数据。然而,传感器和水槽之间的长距离需要大功率的水声通信,这将很快耗尽传感器中有限的电池。另一种方法是使用自主水下航行器(AUV)从水下传感器[4]中收集数据。AUV可以移动到一个传感器节点附近,然后通过短程和高频射频(RF)或光链路收集和中继收集到的数据。auv的中继可以降低水下传感器节点的能量消耗,因为水下声通信对电池供电的水下传感器节点是能量消耗的。
轨迹规划是基于AUV的数据收集方法的关键。传统上,AUV被设计为沿着固定的轨迹巡航,如分层扫描路径[5]、线性往返轨迹[6]、椭圆轨迹[7]-[9]、螺旋轨迹[10]、[11]。为了遍历所有的传感器节点并收集其中的数据,在部署AUV[5],[12]-[15]之前,可以根据节点的位置仔细计算一个静态轨迹。

然而,在一些物联网应用中,水下传感器节点的位置是不可用的。以图1中的海龟追踪为例。以海龟为例,将传感器安装在海龟上,追踪它们的水下迁徙路线。AUV收集的基于短距离中继的数据可以显著延长海龟身上传感器的使用寿命。然而,由于海龟正在移动,因此不可能计算出未知位置的AUV的静态轨迹。即使传感器是固定的,我们也不能知道确切的坐标因为水下没有定位系统,这与陆地物联网(IoT)系统不同。
如果没有移动节点的位置,规划一个动态轨迹是具有挑战性的。AUV必须检测附近传感器的存在,并根据检测信息动态调整其巡航轨迹。由于海域面积大,信号衰减大,AUV只能检测到附近的传感器节点,并且只能提供有限的信息(如传感器节点的方向)。同时考虑到AUV的巡航能量有限,很难为AUV设计一个数据高效的动态路径。
为了解决上述基于动态轨迹规划的数据采集所面临的挑战,我们提出了一种计划-时检测框架,其中使用长传播声波来检测和估计传感器节点的存在。此外,短程通信还用于AUV和传感器节点之间的数据传输。在能量耗尽之前,AUV浮到地表,并将收集到的数据传递到水池。
本文的主要贡献总结如下。
- 计划时检测:解决位置不可用,我们提出一个计划时检测框架,制定动态巡航调整作为预期收益最大化问题考虑获得从传感器收集的数据,AUV运动的成本,和数据丢失的节点基于传感器的检测方向和检测概率。提出了基于个体的动态轨迹规划(IDTP)来动态访问下一个具有最大收益的传感器。
- 基于分组的动态轨迹规划(GDTP):为了进一步提高AUV有限能量下的数据效率,我们将利用检测到的方向共享轨迹共同通信区域的传感器分组,这样AUV的一次移动就可以收集一组的数据。然后提出一个GDTP来确定下一个巡航方向,可以访问具有最大数据量和在检测不确定性下要求最小巡航能量最大的传感器组。
本文的其余部分的安排如下。第二节回顾了AUV数据收集中的相关工作。在第三节中,我们提出了系统模型,并制定了数据收集问题。然后,我们在第四节中提出了所提出的GDTP算法。第五节展示并讨论了仿真结果。最后,第六节对本文进行了总结。
2.相关工作
在文献和实际应用中,基于AUV的数据采集有三种路径规划:1)固定路径;2)静态路径;3)动态路径。
A. Fixed Path Planning
固定的规划不需要节点信息,而AUV只是沿着固定的预定义路径遍历整个或部分区域。
在不了解节点位置的情况下,提出了固定路径规划,对被监测海域进行扫描并收集数据。受割草机模式的启发,Nam [16]和Arkin等人[17]提出了一种在相同深度穿越传感器的z形路径。Han等人[5]提出了一种基于分层扫描邻域的网格(GPN-LSCAN)数据收集算法,将固定z形路径扩展到三维水声传感器网络(UASNs)。
AUV的能量被限制在扫描一个大的监测海域。为此,Ilyas和Alghamdi [8]提出了一种AUV辅助高效数据收集(AEDG)路由协议,其中AUV沿着一个固定的椭圆轨迹移动。AEDG通过允许远离椭圆轨迹的传感器通过多次跳转将其数据传递到离轨迹很近的一个节点,从而缩短了轨迹的旅程。同样,Han等人提出了AUV的固定螺旋轨迹。由于多跳数据转发可能会使轨迹附近的节点成为通信热点,Han等人[11]提出了一种多auv方案来释放热点。
B. Static Path Planning
静态路径规划根据AUV出发前传感器节点的位置计算出巡航轨迹。因此,静态路径规划通常应用于传感器部署固定,节点位置提前知道的情况。
在AUV有限的能量下遍历所有传感器节点的静态规划类似于经典的旅行推销问题(TSP),通常是np困难的。以静态规划作为TSP,提出了一种最近邻(N-n)算法[18],以始终访问来自当前位置的最近邻。
为了减少AUV必须遍历的节点数量,提出了许多算法对传感器节点进行集群,只需要遍历[5]、[13]、[14]、[19]。Han等人[5]提出了一种基于集的概率邻域覆盖贪婪启发式算法(PNCS-GHA),该算法构造了一个最小概率邻域覆盖集(PNCS),将节点划分为聚类,缩短了巡航旅程的长度。Duan等人[14]以数据的信息值(VoI)为标准,将网络划分为几个集群,其中计算一个静态路径来访问VoI最大的集群。
C. Dynamic Path Planning
当节点位置提前不可用时,无法计算AUV之前的静态路径规划。在这种情况下,AUV必须在其飞行过程中动态地确定其持续的飞行轨迹。
Basagni等[20]提出了一种基于VoI的贪婪自适应AUV路径规划(GAAP)。在本文中,VoI被定义为时间的递减函数。每当产生新数据时,传感器节点通过声通道向AUV发送一个短包以报告VoI。根据接收到的VoI信息,AUV动态调整其轨迹,以最大化传递到接收器的数据的VoI。
为了减少AUV的巡航行程和节省能源,Yan等人[21]提出了一种针对AUV辅助UASN的节能数据收集解决方案(EDCS)。EDCS允许节点将他们的数据传输到网关,而AUV只需要访问网关节点,并使用一个较短的巡航路径来最大化收集到的数据的VoI。然而,现有的动态轨迹规划依赖于节点位置的知识,并根据通信范围内报告的VoI来调整AUV的轨迹,而不是从传感器节点检测到的信息。
动态轨迹平移也被用于避免AUV的水下障碍。Lv等[22]提出通过预测障碍物的轨迹和分析碰撞概率来动态调整AUV巡航,以实现安全避障。然而,避障方法与没有节点位置的数据采集方法有显著差异。
3.系统模型和问题定式化
A. Network Architecture
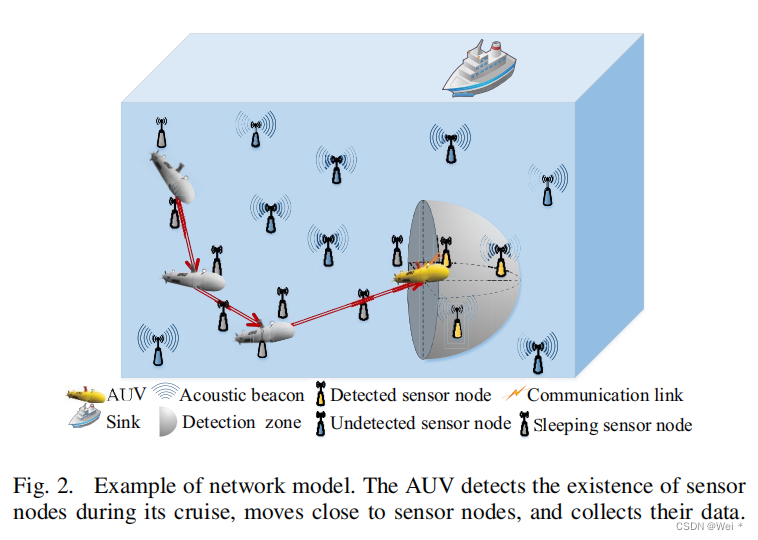
我们考虑了水下传感器网络中的数据收集,其中传感器节点部署在大小为L×W×H的三维水下环境中,如图2所示。水槽位于水槽所在区域的水面上。一架AUV正在水中巡航,并试图访问水下传感器节点,以收集感知数据。在这种情况下,AUV和被访问的传感器节点可以利用用于数据传输的短程高速通信技术1,如图2所示。通常,由于信号衰减[24],短程通信比远程通信消耗更少的能量。因此,短程通信可以节省水下传感器节点的能量,延长网络的使用寿命。
B. Sensor Node Model
我们考虑了水下传感器节点的位置不可用的情况。AUV必须检测水下传感器节点,并动态规划其巡航路径来收集数据。为了实现AUV的节点检测,我们使传感器节点能够定期广播水声信标来显示它们的存在。当传感器节点到的感知数据达到B字节时,传感器节点广播信标;否则,发射机将保持静音以节省能源。在将数据传输到AUV后,传感器节点将清空其缓冲区,开始新一轮的传感,如图2所示。
C. AUV Model
AUV配备了一个统一的圆形阵列(UCA)来接收信标信号,并检测在三维水下环境中的传感器节点的存在。UCA包含M个元素,估计入射信号的方位角ϕ和俯仰角θ,如图3所示,其中O为AUV的位置。假设阵列上有K(K≤M−1)信号,每个信号sk (t)(k = 1,2,…,K)来自方向(θk,ϕk)(K=1,2,…,K,−[π/2]<θk<[π/2],−[π/2]<ϕk<[π/2])。在t时刻,UCA的接收信号X可以表示为[25]、[26]

其中S(t)=[s1(t),s2(t),…,sK(t)]T表示接收信号向量,N (t) = [n1(t),n2(t),…,nM (t)] T表示噪声向量,A表示转向矩阵。UCA的转向矩阵是

其中
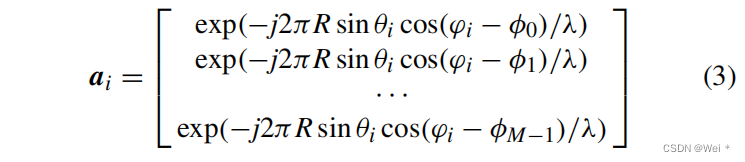
φk = 2πm/M(m = 0,1,…,M−1)和R表示UCA的半径,λ表示波长。
由于具有M个元素的UCA最多可以解出M−1源,所以让第一个K个入射角表示真实信号源的入射方向,最后一个(M−1−K)入射角表示噪声产生的虚拟信号源的入射方向。当没有噪声时,虚拟信号源的波形满足sk (t) = 0,对于k = M−1−K,…,M−1。等式(1)可以重写为

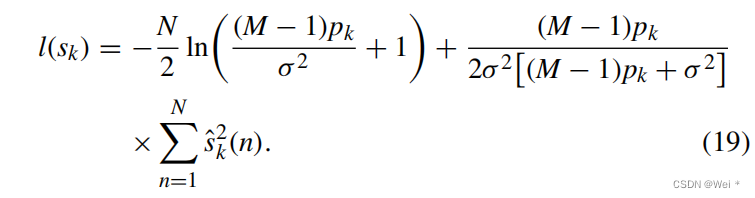
通过对接收信号的计算和处理,估计了(M−1)信号的方向。为了区分估计方向上的信号(θˆi,ˆϕi)是来自一个可能的节点还是一个虚拟信号,采用[27]进行功率似然比假设检验。理论上,第k个节点的幂可以表示为

其中,sk (t)为第k个信号源波形,σ2表示噪声方差,N为快照数。对估计入射方向的信号功率(θˆk,ˆϕk)的假设检验为

H1判断在(θˆk,ˆϕk)中进行,向哪个方向有一个节点bk,检测概率为PD k。如果判定为H0,则方向(θˆk,ˆϕk)只包含噪声。角度估计和检测概率的计算将在IV-A节中规定。我们在本研究中使用的概念列于表一。
D. Problem Formulation
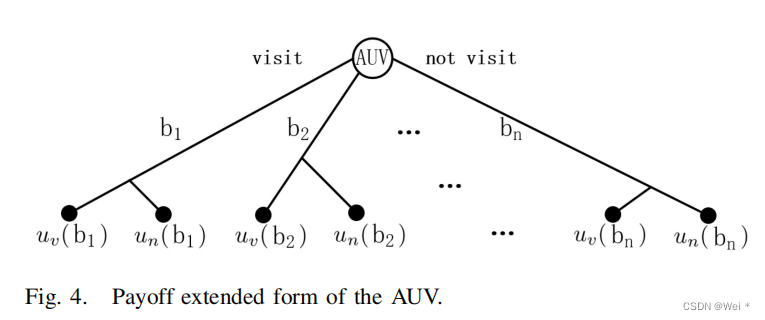
可以检测到多个方向上的多个节点,从而导致巡航决策的多种选择。巡航决策用图4中不同的分支来表示。对于每个节点,AUV有两个选项“访问”和“不访问”。
AUV在下一次巡航前必须考虑以下情况。
- 对节点的访问可以收集其中的数据并获得积极的收益。然而,节点检测可能会出现错误和误警报。当AUV选择访问一个节点时,在该巡航方向上可能没有节点。因此,在这种情况下,巡航能量被浪费,AUV将得到负回报。
- 当AUV选择访问一个节点时,将无法访问其余的节点。因此,在这些数据中所感知到的数据节点将丢失,这意味着数据收集的负收益。
假设每个节点包含B个字节的数据。因此,收集B字节的数据将获得B的回报。成本是AUV移动的能量消耗。假设节点发出的声波以球形方式扩散,AUV的检测区域为半径为d的半球。该半径表示节点可被检测到的最远距离。一旦AUV确定了其巡航方向,它将移动到在该节点的通信范围内的一个悬停点来收集数据。设L0为AUV移动1m时的能耗。考虑到一个节点的检测概率与该节点与AUV之间的距离有关,从当前悬停位置访问节点bi的巡航成本可以由

AUV移动到检测边缘的巡航成本定义为Lc = L0·d。AUV巡航决策总结了收益矩阵。根据收益矩阵,访问bi的预期收益(bi)和不访问bi的预期收益(bi)可以分别表示为:

由于AUV携带有限的能量有限,应该考虑它的能源消耗。AUV在悬停点Pk处的电流剩余能量Eres可以表示为

在bi中收集数据后,AUV浮到地表所需的能量可以表示为

我们将巡航成本L(bi)与前−Eback的比率定义为

我们在以下情况下考虑εi来评估访问bi的可行性。

在当前的悬停位置,AUV必须选择下一个访问节点,冒着误报错误检测的风险,考虑到数据损失和巡航能耗,最大化其收益。根据前面讨论,检测到的节点应满足0 < ε≤1的要求。它们是AUV要访问的下一个潜在节点。用下一个访问的候选节点表示B,AUV的IDTP问题可以表示为

使用(13),AUV可以确定下一个向节点b∗j到下一个悬停点Pi+1的移动方向。现在的悬停点Pi和下一个悬停点Pi+1将形成AUV轨迹的轨迹。考虑到通信范围,节点b∗i的位置并不等同于下一个悬停点Pi+1,在巡航过程中将收集靠近轨道的节点中的数据。一旦从节点b∗i收集数据,AUV将停止在悬停点Pi+1,检测节点并确定下一个轨迹轨迹,考虑到悬停状态的检测性能优于移动状态。巡航轨迹将由连续的轨迹动态形成,这可以由P = {P1,P2,…,Pn}表示。
检测到的最近的节点可能由(13)输出。根据表II中的收益矩阵,最近的节点需要最小的巡航能量Lc,并且可能有最大的检测概率PD,因为来自最近节点的UCA上的入事件信号是最强的。在这个意义上,(13)类似于最近的节点策略N-n [18]。不同之处在于,N-n需要了解节点的位置,而IDTP则使用检测信息。
请注意,多个节点可以在数据收集中定位在一个巡航方向上,并共享相同的轨迹,在这种情况下,一个巡航轨迹可以从多个节点收集数据。IDTP中的最近节点策略不考虑节点的分布特征,也不利用轨迹的共享。为了进一步提高数据收集效率,我们将在下一节中为AUV提出一个GDTP。
4.基于分组的动态轨迹规划
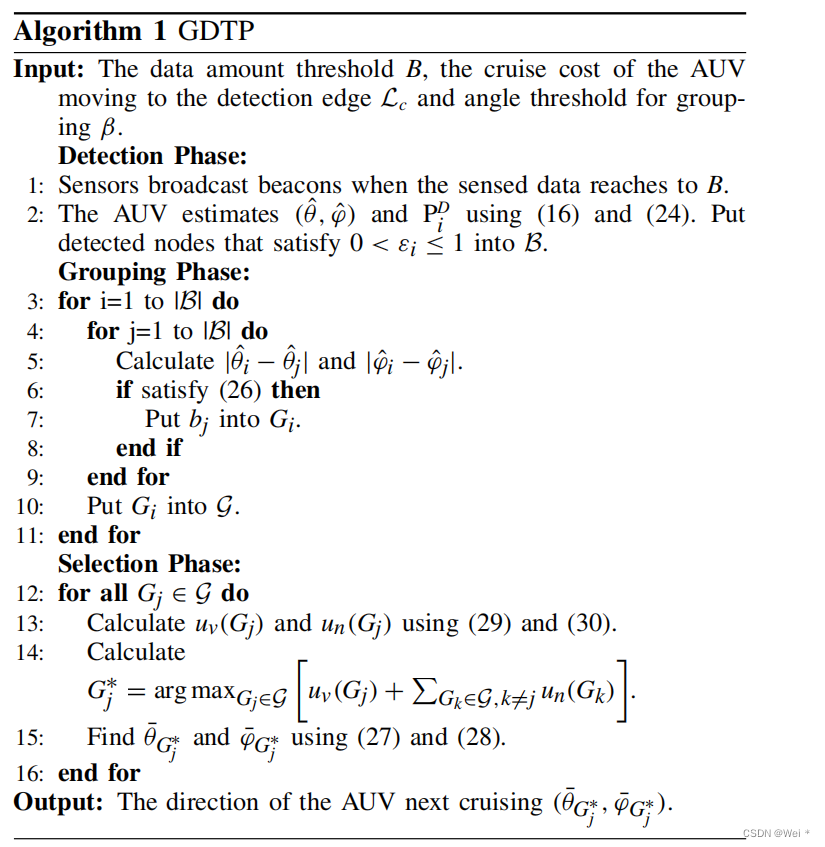
所提出的GDTP包括检测、分组和选择阶段。
A. Detection Phase
我们使用一个被动检测模型来检测传感器节点的存在性。首先应用多信号分类(音乐)获得M−1入射信号的角度,然后使用基于功率的假设来判断节点的存在性并计算其检测概率。
1)节点方向估计
音乐用于估计节点的方向。如前所述,(M−1)信号源入射在阵列上。前K个入射角表示真实信号源的入射方向,最后一个(M−1−K)入射角由噪声产生。UCA的接收信号见(4)。自协方差矩阵RX可以表示为

其中,RS = E[S (t)SH (t)],σ2表示噪声方差,I (M)是一个M×M维单位矩阵。RX的特征分解可以表示出来

其中,U和分别为RX的M×(M−1)维特征向量矩阵和特征值矩阵。US是信号子空间,UN是噪声子空间,而SN是由K个大特征值和剩余的小特征值组成的对角线矩阵。音乐空间频谱[28]可以表示为

然后通过音乐空间频谱上最大的M−1峰来估计M−1可能的源方向。
2) Hypothesis Test for Each Node
该音乐算法可以找到所有可能的M-−-1源的方向。但是,它不能判断哪个一个是真正的源还是虚拟源。因此,我们使用假设检验来判断真实源的存在性及其检测概率。对(θˆk,ˆϕk)的信号功率的假设检验显示为(6)。在H0(k)中,接收到的信号服从sk∼N(0,σ2)。在H1(k)中,接收到的信号服从sk∼N(0,(M−1)pk + σ2)。似然函数比可以表示为[29]
其中

对数似然比可以表示为
假设决策阈值为γ0,假设检验可以表示为

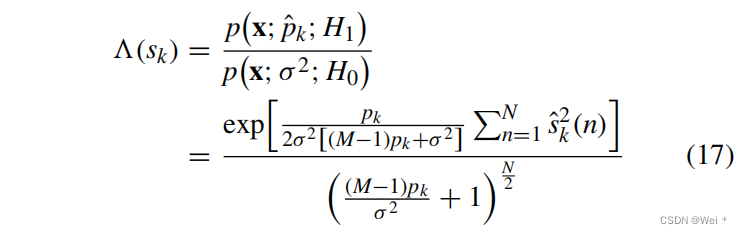
基于权力的假设检验成为

其中

信号数ˆK是估计的传感器节点数,它等于与H1(k),k = 1,2,…,M−1的决策数。此外,误警概率PF和与(θˆk,ˆϕk)相关的检测概率PD可以由
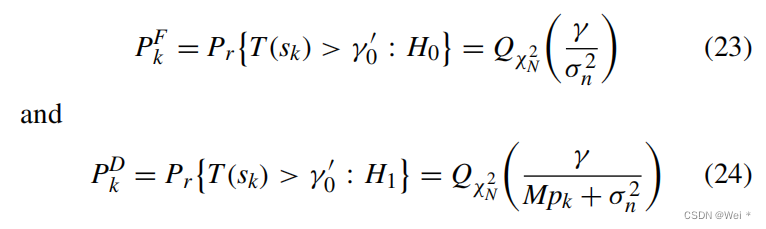
各自地Qχ2 N (x)是服从卡方分布的随机变量χ2 N的右尾分布。
B. Grouping Phase
我们观察到,AUV可以在一个移动轨迹中收集多个节点的数据,如图5(a)和(b).所示图5(a)描述了两个节点彼此相距不远时的场景。在这种情况下,它们共享一个共同的通信区域。AUV可以通过移动到公共区域来同时收集两个节点中的数据。或者,在图5(b)中,节点A和节点B之间没有共同的区域,但它们都在同一轨道附近。AUV还可以在一个移动的轨道中收集他们的数据。在图5(a)和(b)的情况下,A和B可以分成一个巡航轨道。
为了在一个轨迹中收集多个节点的数据,AUV面临以下问题: 1)是否存在这样的轨迹对节点进行分组,2)如何仅使用估计的节点角度来计算这样的轨迹。
我们提出了一个公共面积模型来分组节点,并计算组的移动方向。如图5©所示,假设在检测区域的边缘有两个点A和B,并且它们有一个共同的区域。由于AUV只获取节点的方向知识,而不是节点之间的距离,所以我们将检测到的节点分组在AOB.区域对β进行分组的角度阈值可以通过

由于sin(∠AOB/2)= C/D,其中C表示通信范围,D表示检测范围。对于具有估计方向的两个检测节点(θˆi,ˆϕi)和(θˆj,ˆϕj),
它们将落入A‘OB’区域,如果它们的角度满足,可以分组

当Gj中的任意两个节点满足(26)时,则计算Gj中轨道收集数据的巡航方向
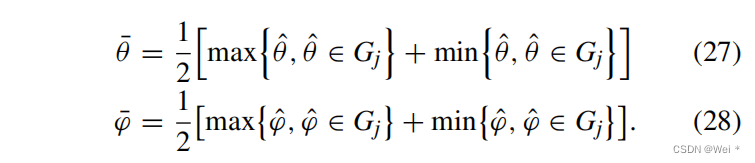
建议的GDTP使用(26)来对节点进行分组,并使用(27)和(28)来确定该组的巡航方向。
C. Selection Phase
本阶段分组时将检测到的节点分为多个组,如图6所示。AUV必须选择一组进行访问,这可以在数据收集中获得最大的收益。
与第三节-D节中的陈述类似,访问一个组可以从该组中的节点获得数据,而在其他组中则有数据丢失的风险。因此,访问一个团体的回报和损失可以表示如下:

AUV应选择以下一组进行访问,具有最大的预期收益:
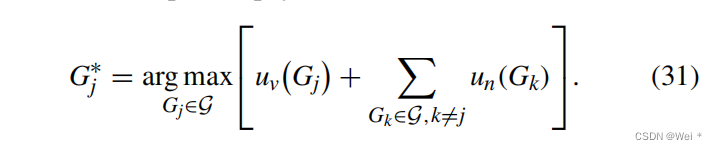
AUV可以使用(31)选择组G∗j,并且可以使用(27)和(28)确定向组G∗j的下一个移动方向。在收集到预期的传感器数据后,AUV将悬停并开始下一次检测。算法1总结了GDTP的细节,它的时间复杂度为O(|B|^2)。
D. Probe Dead Zone
AUV可以在其动态巡航期间进入一个探测死区(PDZ),在那里AUV没有检测到任何节点。在PDZ中,节点在向AUV报告数据后进入睡眠状态(见第三-B节),其他节点超出了AUV当前悬停点的检测区域。如果没有任何检测到的节点,AUV就无法通过使用(13)或(31)来确定其下一个巡航方向。
我们使用随机游走(RW)方法对AUV来逃避PDZ。在PDZ中的一个悬停点,AUV随机选择一个巡航方向并沿着这个方向移动。当在移动过程中检测到节点时,AUV将使用(31)来确定其下一次移动。当没有检测到节点时,AUV将在移动最大距离后停止,随机选择另一个巡航方向。
5.仿真结果
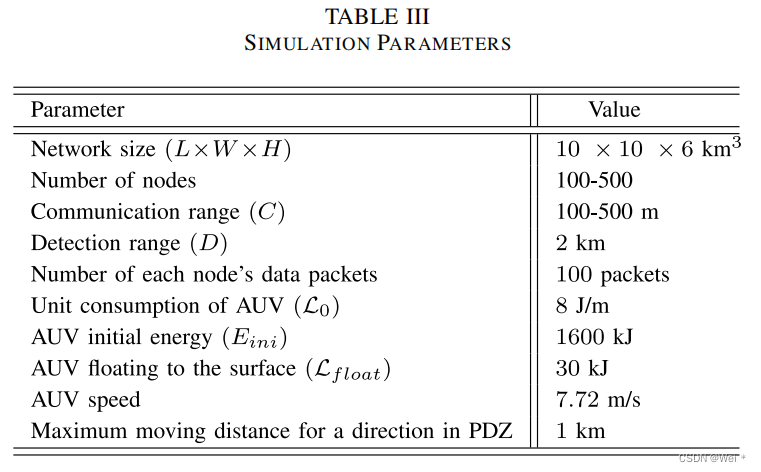
在模拟中,节点均匀分布在一个三维区域,详细参数见表3。我们比较了所提出的GDTP和IDTP与LSACN [5]、PNCS-GHA [5]、N-n [18]和RW算法[18]的性能。表四总结了这些算法之间的相似之处。我们比较了上述算法在收集效率方面的性能,即收集到的数据包与AUV的能量消耗之比。

A. Performance of Node Detection
B. Example of Trajectories
C. Impact of Communication Range
D. Impact of Node Density
6.总结
本文研究了AUV在水下传感器中收集数据的动态路径规划问题利用AUV的移动来降低传感器节点的传输功率。我们考虑了这样一个场景,即水下传感器的位置无法用于AUV的轨迹规划,这可以在典型的水下应用中找到。为了解决节点位置的不可用问题,我们提出了一个规划-同时检测框架来动态规划AUV的轨迹。特别地,我们提出了一种GDTP算法,该算法将具有公共通信区域的节点分组,并调整下一个巡航方向,以以巡航能量为代价和错误检测风险收集最多数据的组。仿真结果表明,与现有方案相比,GDTP中的AUV可以以更少的AUV能耗收集更多的数据。
在未来的工作中,我们将设计一种算法,利用历史检测信息和先验信息,更有效地规划轨迹和收集数据。




























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











