







文章目录
论文基本信息
《An Active Mobile Charging and Data Collection Scheme for Clustered Sensor Networks》
《一种基于集群传感器网络的主动移动充电和数据采集方案》
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 68, NO. 5, MAY 2019

https://www.letpub.com.cn/index.php?journalid=3425&page=journalapp&view=detail
摘要
近年来,我们见证了延长无线传感器网络(WSNs)使用寿命的有前途的新技术的蓬勃发展。采用移动式车辆进行无线充电和数据采集,能够平衡无线传感器网络的负载,同时为可持续的网络运行提供可靠的能源补充。与传统的传感器节点被动等待移动车辆到达的充电调度策略不同,提出了一种新的基于动态聚类的移动到集群(M2C)方案,以主动的方式优化传感器节点和车辆的服务流程。M2C只需要局部剩余能量信息,就可以刷新基于集群的网络拓扑,以确保传感器节点在充电前不会耗尽能量。通过估计作为一个簇头的能量消耗,主动选择剩余能量接近该估计的传感器节点作为头节点。访问更多剩余能量低的头部节点,减少移动距离,提高充电效率。此外,还从理论上分析了M2C的收敛性和最坏情况下的性能。性能评估结果显示,与目前最先进的方案相比,我们的设计分别减少了旅行距离和充电延迟约10%和50%。
1.引言
无线传感器网络(WSNs)已被广泛应用于许多应用场景中,如灾难在偏远地区[1]、[2]的检测和生态监测。由于环境的恶劣性,需要很长时间的无人值守的可操作性。然而,由于普遍的能源需求和但相对停滞的电池技术[3],传感器节点有限的能源供应阻碍了wsn的大规模部署。
为了解决这些能源问题,人们提出了各种解决方案,其中,使用移动车辆进行稳定和可靠的能源补充,已被认为是一种很有前途的解决方案,[4],[5]。不幸的是,大多数现有的充电方案在补充节点的能源供应时采取了被动的方式,关注场景1)车辆在固定行程后向节点[6]、[7]、[9]-[11]充电,忽略了网络的不确定性(例如,网络拓扑变化和节点故障),因此对大规模WSNs [12]无效,或2)传感器节点在能源耗尽时发送充电请求,然后被动地等待车辆为[13]、[14]充电,这可能不能保证节点的能源供应[15]的及时补充。这些限制导致了这样一个问题:我们能否为移动车辆设计一个主动的解决方案,以确保传感器节点没有能量消耗,从而实现可持续的网络运行?
Li等[16]作为早期研究,表明移动充电过程受到数据转发活动的影响,说明主动控制数据转发拓扑来调整wsn的能耗是可行的。动态聚类协议是实现这种主动拓扑控制[17]的经典解决方案。该网络将定期重新聚集,以延长wsn的使用寿命,为移动车辆提供更多的充电时间。许多现有的集群协议更喜欢能量丰富的节点作为集群头[21]-[23],因为集群头在集群内数据聚合和集群间数据转发[4]方面比其他节点消耗更多的能量。
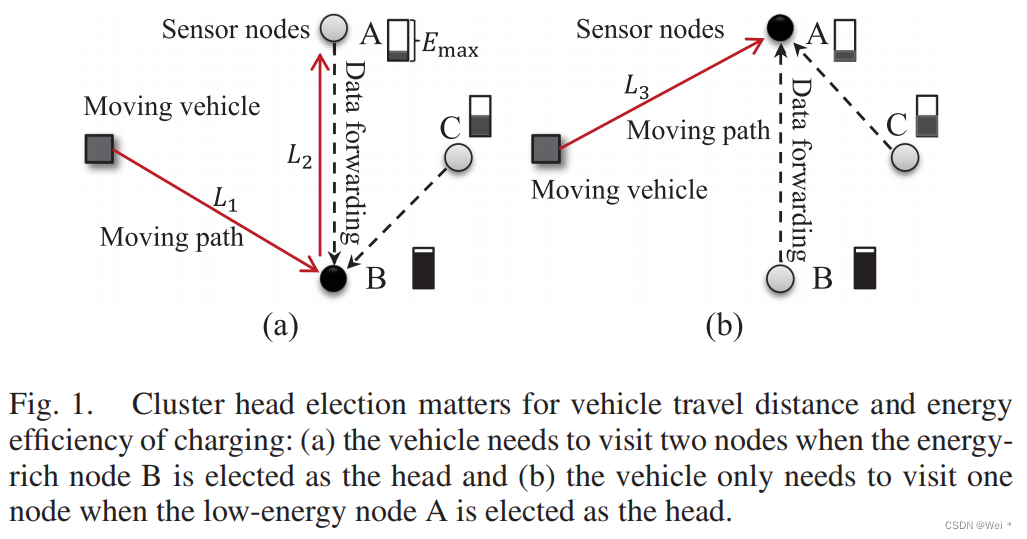
然而,当移动车辆引入wsn时,这种经典的聚类解决方案并不能很好地工作:如图1(a)所示,移动车辆访问了能量丰富的集群头B和耗能量的节点A进行数据收集和充电。设Emax表示传感器节点的能量容量。对wsn的总补充能量约为Emax,总旅行距离为L1 + L2。以图1(b)为例,如果节点A有足够的剩余能量来支持数据聚合,选择A作为头节点允许车辆只访问一个行驶距离L3(L1 + L2 > L3)的节点,同时补充相同量的能量Emax进入网络。请注意,车辆的移动也会消耗大量的能量。本例表明,对于移动车辆的wsn,如果主动选择剩余能量较少的传感器节点作为集群头,则可以随着充电能源效率的提高而减少移动距离。然而,为了确保网络的持续运行,适当的头节点选择对于大规模无线传感器网络来说是一项具有挑战性的任务。
基于上述观察结果,本文提出了一种新的主动移动到集群(M2C)方案,该方案通过局部拓扑控制,选择尽可能少的被访问节点,联合优化移动充电和数据收集过程。在M2C方案中,每个传感器节点根据其剩余的电源和作为集群头的估计能耗来决定它是否会成为集群头。在每个服务周期中,车辆只访问这些主动选择的集群头和其他低剩余能量节点。(读者:那这样是否会导致其它高能量节点的数据不会被采集?(实际的算法初始化时会将所有节点默认成头节点))
我们在本文中的主要贡献包括:
- 设计一种新的M2C方案,主动刷新基于集群的网络拓扑,只需要局部剩余能量信息。
- 对M2C方案的收敛性和最坏情况性能的理论分析。
- 广泛的评估结果表明,我们的设计确保了传感器节点不会耗尽能量。与目前最先进的移动充电和数据收集方案相比,旅行距离和充电延迟可以分别减少约10%和50%。
本文的其余部分组织如下。第二节介绍了相关的工作。第三节介绍了预赛部分。第四节提供了所提出的M2C方案的设计和理论分析。第五节是绩效评价。第六节得出了结论。
2.相关工作
许多研究工作都致力于无线充电和移动数据收集,其中基于旅行推销员问题(TSP)的策略被用于许多解决方案[2],[6],[11],[26]。作为早期的研究,Shi等[6]提出了移动车辆的周期性充电机制,并证明了最优充电路径是最短的哈密顿循环。然而,这种基于tsp的算法忽略了传感器节点的能量消耗的多样性。如果对具有足够剩余能量的传感器节点进行不必要的访问,可能会导致较长的行程长度和充电延迟。观察到这一局限性,Fu等人[11]根据能耗率构建了一套嵌套的TSP之旅,在每个周期中只对能量耗尽的节点进行充电。然而,嵌套的TSP解决方案是一个具有静态网络拓扑结构的预优化之旅。考虑到这些动态特征,Zhao等人[26]和Guo等人[2]在总路径不超过一个充电阈值时,选择了尽可能多的能量最低的节点。这些解决方案可能不够强大,因为一些能量耗尽的节点可能不被充电服务覆盖,并在车辆到达之前耗尽了能量。此外,以往列出的所有研究都采用了集中式方案,需要聚合多维参数来获取全局网络信息。这可能会导致额外的计算和控制开销,因此可能无法扩展到大型网络。
分布式解决方案更符合真实网络环境中wsn的分布式特性。到目前为止,已经有一些工作研究了没有集中控制决策的分布式收费政策。[27]等人提出了一种分布式和自适应的移动充电机制。然而,本研究没有考虑数据的传播和充电延迟。[13]等人研究了基于最近的下一个工作学科的按需收费策略。然而,这种位置偏差的政策可能导致不平衡的能源分布,服务覆盖范围没有得到充分分析。作为我们研究的相关研究,Wang等[4]开发了一种基于原双的分布式集群头选择方法,用于移动充电和数据收集问题。作者假设具有高能耗的星系团头是由从环境中获得的太阳能提供动力的。
分布式解决方案更符合真实网络环境中wsn的分布式特性。到目前为止,已经有一些工作研究了没有集中控制决策的分布式收费政策。[27]等人提出了一种分布式和自适应的移动充电机制。然而,本研究没有考虑数据的传播和充电延迟。[13]等人研究了基于最近的下一个工作学科的按需收费策略。然而,这种位置偏差的政策可能导致不平衡的能源分布,服务覆盖范围没有得到充分分析。作为我们研究的相关研究,Wang等[4]开发了一种基于原双的分布式集群头选择方法,用于移动充电和数据收集问题。作者假设具有高能耗的星系团头是由从环境中获得的太阳能提供动力的。
动态聚类是通过适当的头节点选择来延长网络使用寿命的经典策略。一些算法采用概率函数,在不需要剩余能量感知的情况下选择头节点,实现了WSNs[18]-[20]的低开销聚类结果。然而,在这些解决方案中,没有考虑选择适当的头节点来最大化wsn的寿命。相比之下,一些聚类算法更倾向于选择能量丰富的节点作为头节点[21]-[23]。这样,就可以使高能耗的头节点的寿命最大化。然而,大多数传统的聚类算法都是为数据收集而设计的,而没有考虑移动充电过程的影响。Wang等人[24]通过圆覆盖法将传感器节点组织成多跳簇。Han等人,[25]根据残余能量和到锚点的距离计算头部节点,用于联合充电和数据采集。当使用车辆进行充电时,访问能量丰富的头节点可能会导致不必要的长途旅行和充电效率低。
本文采用了基于tsp的解决方案,克服了传感器节点剩余能量多样性高时的限制。通过选择当移动车辆访问它们时能量即将耗尽的节点,所提出的M2C方案试图选择尽可能少的待访问节点,以减少旅行距离,提高充电的能源效率。
3.PRELIMINARIES
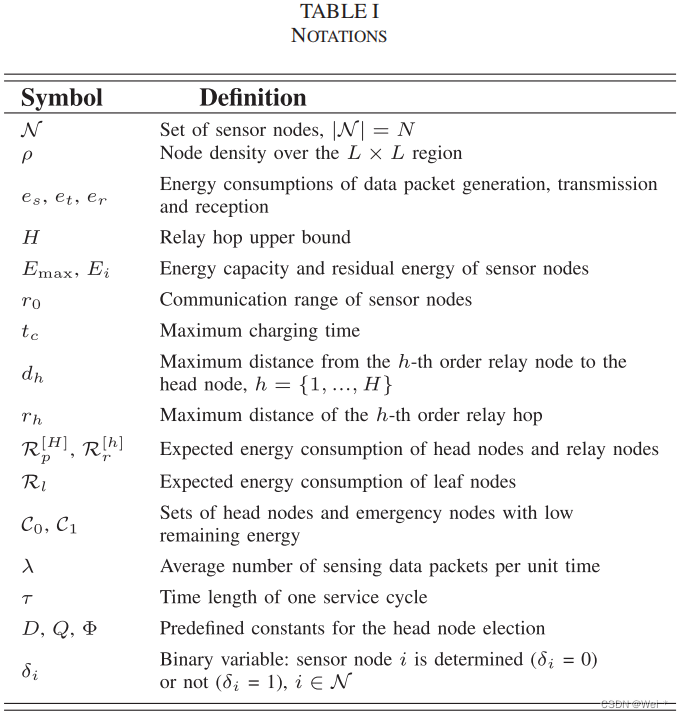
本节提供了无线充电和移动数据收集服务的准备工作,包括网络模型、基于集群的传感器数据转发的能耗模型和wsn的无线充电模型。并对所提出的M2C方案进行了设计概述。表一总结了本文中使用的主要符号。
A. Network Model
考虑了一个无线可充电传感器网络,它由一组准静态传感器节点N(大小为N = |N |)和一个固定接收器(也称为服务站)组成。所有节点都独立随机分布在二维区域L×L上。根据传感器节点的随机分布,节点密度可以定义为大N和L的常数ρ = N/L2,它代表单位面积的期望节点数。每个节点监视其周围的环境,独立地生成数据包。此外,假设每个传感器节点只能与相邻节点进行通信,即在其通信范围r0内的传感器节点进行通信。设Ei表示节点i的初始能量态。对于连续操作,每个传感器节点都配备了充电线圈,以支持无线能量传输。
对于联合无线充电和移动数据采集,采用了一种多功能移动车辆。携带高容量电池和强大的天线,车辆定期从固定的水槽开始,以恒定速度v m/s)顺序访问所有锚点,同时进行传感器节点充电和数据收集。一组选择局部头节点为有效能量传输的候选位置,每个局部头节点通过单跳或多跳数据转发方案聚合其关联子节点的传感器数据。这些头节点可以临时缓存传感器数据,并在车辆到达时上传到车辆。1可以观察到,不同的传感器节点的能量消耗是不同的。事实上,在数据聚合点上的节点,例如集群头,通常会由于沉重的通信负担[4]而产生更高的能量消耗。
B. Sensor Data Forwarding and Energy Consumption 传感器数据转发和能耗
wsn的网络拓扑结构应有效组织,以平衡负载,延长网络寿命。动态聚类是一种有效的拓扑控制方法,它可以将网络组织成一个连接的层次结构,以实现高效、可扩展的数据聚合。本文采用节点排他干扰模型[2]进行数据采集,即不允许任意两个链路同时共享一个公共节点进行传输。一般来说,与非聚类方案相比,基于聚类的数据收集可以减轻由碰撞、空闲侦听和超侦听引起的不必要的能量耗散。当创建一个集群时,将为该集群中的每个节点分配一个专用的时隙,因此可以避免数据包冲突为[23]。然后,建立了传感器节点的能耗模型。当传感器节点处于活动状态时,大部分能量被无线通信消耗,即数据传输和接收,以及传感过程。根据实验验证的模型[7]、[8],给出了一个传感数据包传输等的能耗率

其中e0为常数,e1为功率放大器的距离系数,r为传输距离,γ为路径损耗指数。根据[8],传感器节点用来可靠地接收数据的功耗是一个常数。生成和接收一个传感数据包的能量消耗分别用es和er表示。根据无线通信的功耗模型,每个包消耗的能量与中继跳数成正比。因此,基于集群的数据聚合中的跳数不应该任意大。H表示平衡传感器节点间负载的继电器跳上限。如何选择一个合适的边界H将在后面的第IV-A节中展示。
C. Wireless Charging Model
无线充电技术的发展表明,目前可以大大缩短传感器节点的能量补充时间。例如,Ventev发布了一款新的Qi无线充电工具包,可以为设备供电高达15 W的[28]。充电时间的显著缩短意味着,利用具有无线充电功能的移动车辆可以提供稳定可靠的能量补充,从而为可持续的网络运营提供了一种很有前途的途径。一般来说,现有的无线能量传输研究工作主要可分为两类:基于接触的(如感应耦合[6])和无接触的充电(如磁谐振耦合[30]和电磁辐射[31],[32])。良好的标准化感应耦合可以在非常短的范围内(即几毫米)进行高效充电。相比之下,无接触充电可以提供更高的空间自由度,同时承受超过距离[30],[31]的高能量衰减。由于其目的是设计一种高能效的无线充电场景,本文考虑了基于接触的充电技术。由超级电容器供电的传感器节点可以以恒定电流充电。充电时间与电压的[11]呈接近线性关系。因此,完成节点i充电的时间由

其中,Ei (t)为车辆到达时间t点时传感器节点i的剩余能量,tc为给能量耗尽的传感器节点完全充电的时间。
D. Design Overview
一般来说,对于集群传感器网络,车辆需要访问集群头节点(C0)进行联合充电和数据采集,以及剩余能量低的应急节点(C1)进行充电。如果集群头节点在车辆到达时也成为紧急节点,则可以减少每个服务周期中访问的节点总数。这样就可以减少传感器节点的车辆行驶距离和充电/数据收集延迟,如图1所示。
我们的主要目标是在每个服务周期中减少访问节点的数量,而不牺牲网络中的节点寿命,即∀Ei (t) > 0。为了实现这一目标,首先从理论上评估了基于集群的数据聚合中各个节点的能量消耗。网络拓扑根据局部剩余能量信息进行主动刷新,试图确保集群磁头在能量即将耗尽时及时得到能量补充。所有剩余能量较低的应急节点都作为叶节点放置,以最大限度地节能。在充电调度中,在每个无线充电和移动数据采集周期中,只涉及能耗较高的集群头节点和应急节点。
4. MOBILE-TO-CLUSTER DESIGN
在本节中,我们对各个节点的能耗进行了理论评估。基于分析结果,提出了移动聚类和自适应聚类调节算法设计,以主动刷新基于聚类的网络拓扑。的收敛性和最坏情况下的性能并对所提出的M2C方案进行了理论分析。在本节的最后,还给出了最优的旅行路径规划。
A. Energy Consumption Evaluation
让我们首先考虑传感器节点的能耗。在具有随机节点部署的二维网络中,具有有界中继跳H的路径的最大长度可以为Hr0。但由于传感器节点密度ρ有限,实际最大距离dH较小,如图2所示。因此,Hr0为dH的上界。采用贪婪最大化方法[33]识别多跳距离dh,h = 1,…,H。一般方法如下: 1)理论分析和仿真结果表明,二维网络中的距离分布。然后基于分布,每个中继跳rh分析,0 < rh≤r0,h = 1,…,H. 2)的期望最大多跳距离E(dh)迭代通过限制传播方向向外源节点在每个中继跳和贪婪地选择最远的邻居。

多跳簇可以近似为一个半径为E(dH)的圆盘,它由H个同心环[4]、[34]组成。证明了一个节点的期望邻居数为ρπE(dH)2,节点密度的独立随机分布为ρ [35]。如图2所示,利用多跳中继将传感器数据聚合到头节点。由于τ是一个服务周期的时间长度,传感器数据的生成遵循泊松过程,平均单位时间[4]为λ个数据包数,2传感器节点的能耗具有以下特性。
特性1:对于中继跳上限H,服务周期中头部节点的期望能耗为

证明参照附录a。这意味着如果剩余能量大于R[ p H],传感器节点可以作为头节点。根据分析以上,最大中继跳界可以设置为

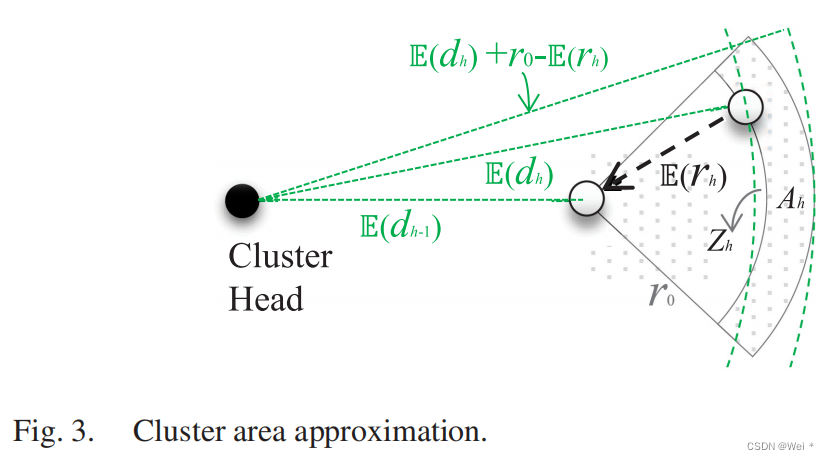
此外,如图2所示,集群也可能由H−1阶中继节点组成。值得注意的是,在阴影区域中不存在传感器节点,否则这样的节点将是新的最远的邻居,rh应该更大。第h阶中继节点的期望最大多跳距离由E(dh)给出,这是一个近似值,因为图3中Zh区域中的任何节点到头节点的距离都更长。仿真结果表明,区域Zh引起的近似误差具有上界,[33]可以忽略不计。因此,如图3所示,所有h阶中继节点的空区可以分别用以半径为E(dh)和E(dh)+ r0−E(rh)的头节点为中心的两个环之间的差值来近似。
特性2:在一个服务周期中,第h阶中继节点的消耗能量可估计为
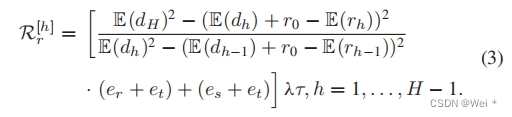
证明参照附录b。
具体来说,没有子节点的叶节点,能耗最低

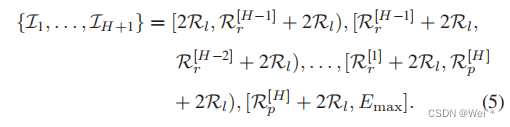
如果剩余能量大于R[ r h] + 2Rl时,传感器节点可以加入候选集,作为第h阶中继节点。这是因为,如果一个剩余能量为R[ r h] + 2Rl的节点作为中继节点,则预计它将消耗R[ r h]能量,但在当前的服务周期中不被充电。然后将该节点作为叶节点,在下一个周期中获得能量补充。最大充电延迟为2个周期,增加2Rl,以确保它不会耗尽能量。基于以上分析,剩余的H + 1区间总数的能量区间可以构造如下
基于局部剩余能量Ei,每个传感器节点可以自主地决定它是否适合成为一个头部的节点或中继节点,不需要集中式决策。值得注意的是,RpH和RrH是最大能量消耗的期望。仍有可能存在能耗大于预期的传感器节点。因此,提出了一种自适应聚类调节算法,其中传感器节点可以在意外能量消耗的情况下更新网络拓扑,这将在第IV-C节中提出。
B. Clustering-for-Mobile Algorithm
通过观察剩余能量水平的多样性,提出了一种新的移动聚类算法,使合适的传感器节点分别作为头节点、中继节点和叶节点,使无线传感器网络能够真正连续操作。移动聚类算法联合优化了传感器节点和移动车辆的无线充电和移动数据收集过程,并充分考虑了网络覆盖的可伸缩性、服务延迟和旅行距离。值得注意的是,移动聚类算法在所有传感器节点上并行运行。
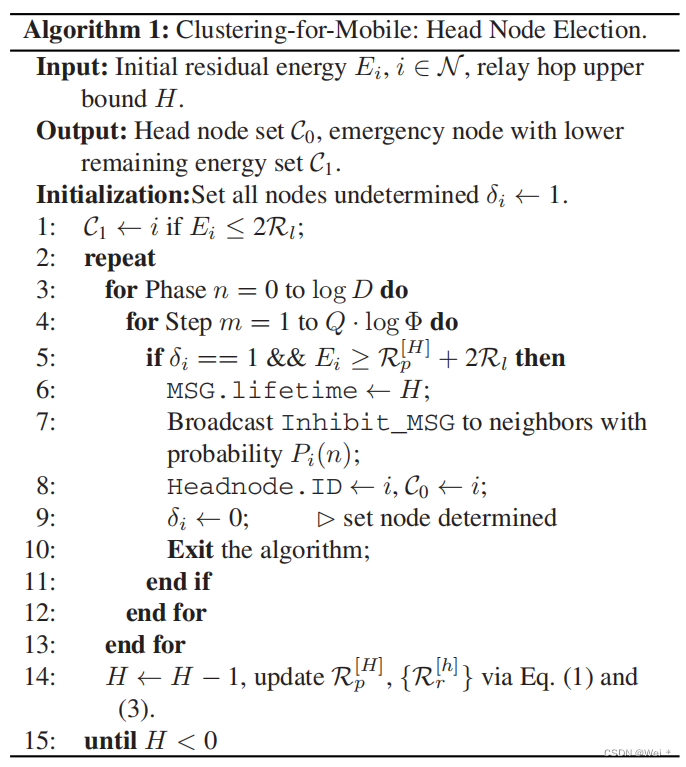
受随机过程的控制,移动聚类的基本思想是,每个具有足够剩余能量的节点都有可能被选为一个头节点。如果头节点是自主选择的,它将广播一个消息来抑制它附近的邻居。在极端条件下,如果一个区域内的所有节点都没有足够的能量作为头节点,则形成不同大小的簇,以确保网络覆盖。即,中继跳界从H逐渐减少到0。此外,所有的传感器节点在默认情况下都将成为头节点,除非它们被抑制。这种抑制过程确保了网络中的所有节点要么被选为头节点,要么被集群中的头节点所抑制。由于所提出的移动聚类算法在每个服务周期中执行,基于随机过程选择的优点是在每个周期中可以选择不同的节点作为头节点进行充电,确保了无线能量补充的公平性。移动聚类的伪代码分为头节点选择部分和抑制部分,分别见算法1和算法2。
(车辆需要访问集群头节点(C0)进行联合充电和数据采集,以及剩余能量低的应急节点(C1)进行充电。)

在每个服务周期开始时,wsn中的所有节点都被初始化为未确定的δi = 1。该算法进行H + 1轮。每一轮都包含logD-+1阶段。此外,每个阶段都由Q·logΦ迭代组成,其中D、Q和Φ是预定义的正整数,将在本节后面指定。在该阶段的每次迭代中,每个未确定的节点都有一个概率Pi (n)是一个头节点(将自己添加到头节点集c0中),并向邻居广播一个Inhibit_MSG,其中Pi (n)被精心设计如下

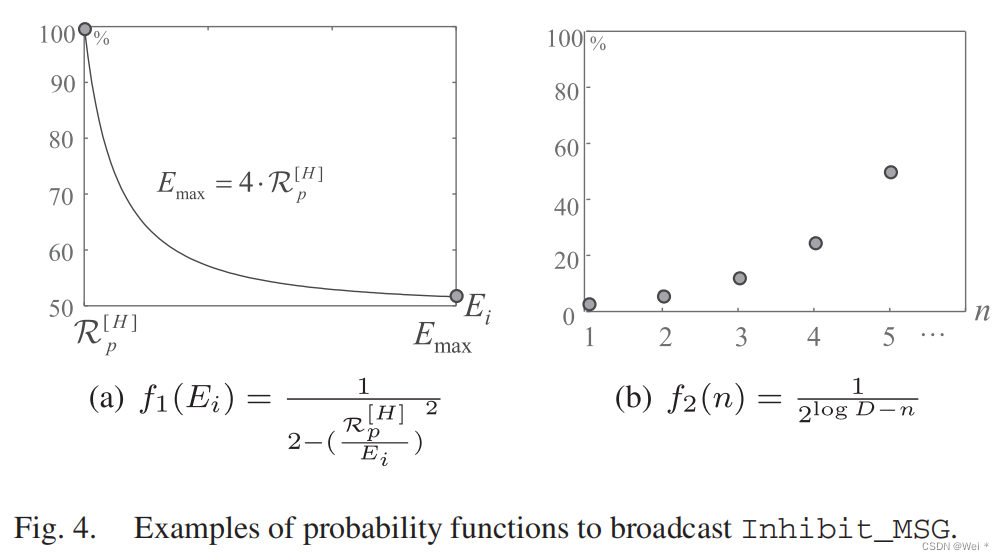
然后,证明了Pi (n)的合理性是合理的。在一轮算法中,只有剩余能量为R[H] p≤Ei≤Emax的节点才可以成为头节点。如图4(a)所示,满足1 2 < f1(Ei)≤1。Ei越接近R,就越多很可能的节点i将被选为一个头节点。剩余能量较低的节点,在其能量水平进入I1之前,会得到及时的能量补充。从长远来看,随着应急节点出现的减少,移动车辆的行驶距离将会减少。此外,如图4(b)所示,f2(n)=1 2logD−n保证了广播Inhibit_MSG的概率随着相位n的增加而增加。它可以证明,当该算法终止时,网络中的所有节点都被确定,即,它们要么被选为头节点,要么加入一个集群。该证明在定理1中进行了详细说明。
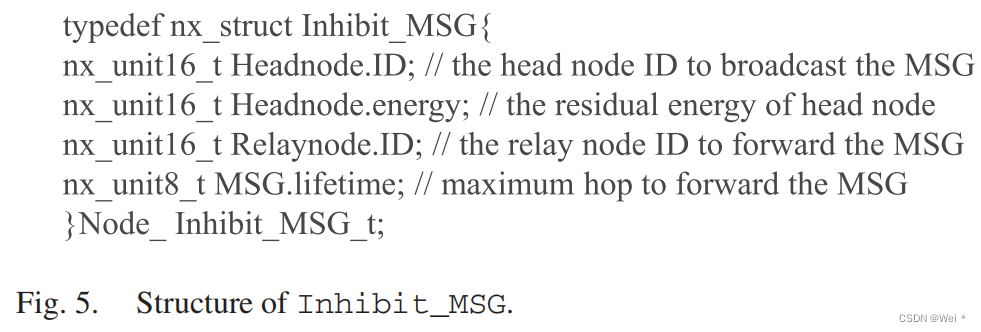
Inhibit_MSG的结构如图5所示,记录了头节点和中继节点的ID。值得注意的是,Inhibit_MSG是一个较短的7字节的消息,以实现更低的通信开销。此外,Inhibit_MSG的条目给出了中继跳的一个上界。最初,味精的寿命被设置为h。一旦一个未确定的节点接收到一个Inhibit_MSG,它将检查其剩余能量是否足以成为一个中继节点,并更新MSG.lifetime

节点i的剩余能量在第高区间。这确保了Inhibit_MSG的转发次数不超过H次。因此,节点i将被视为si-th阶中继节点。

如果MSG.lifetime>0,节点将更新的Inhibit_MSG转发给它的邻居。然后将该节点设置为已确定的δi = 0,并退出算法。对所提出的移动聚类算法的证明和完整的分析如下。
定理1:当所提出的移动聚类算法在H + 1轮进化后终止时,所有传感器节点的确定概率不小于1−ΦQ(1−1 2D)。
证明参照附录c。所有节点都将被高概率的充电和移动数据收集服务所覆盖。例如,如果D = 16、Φ = 10和Q = 3,则该概率大于99.9%。此外,移动设备的聚类是高效的,因为它只需要(H + 1)·Q·(log D + 1)·log Φ迭代来收敛于O (1)的计算复杂度。由于计算复杂度与传感器节点的数量N无关,因此我们的分布式设计可以应用于大规模的网络。实验结果表明,传感器节点的时钟分辨率约为30.5 μs [36]。基于硬件时钟,传感器节点可以在高频下传输抑制。也就是说,这个提议的持续时间很短。
性质3:所提出的移动聚类算法的消息交换复杂度为O (N)。证明参照附录D。
C. Self-Adaptive Cluster Regulation Algorithm
利用所提出的移动聚类算法,在无线充电和移动数据采集服务开始之前,以分布式的方式形成了基于聚类的网络拓扑结构。评估传感器节点的预期最大能耗,试图确保所有传感器节点都可以被安排在适当的角色中。但是,这并不能保证能耗评估总是准确的,特别是在传感器节点不均匀分布的情况下。例如,一个具有剩余能量R[ p H]的头节点,如果在集群中有超过πE(dH)2ρ个子节点,则可能会在数据聚合过程中耗尽其能量。因此,我们开发了一种自适应的聚类调节算法,以进一步提高移动聚类在意外能量消耗情况下的鲁棒性。
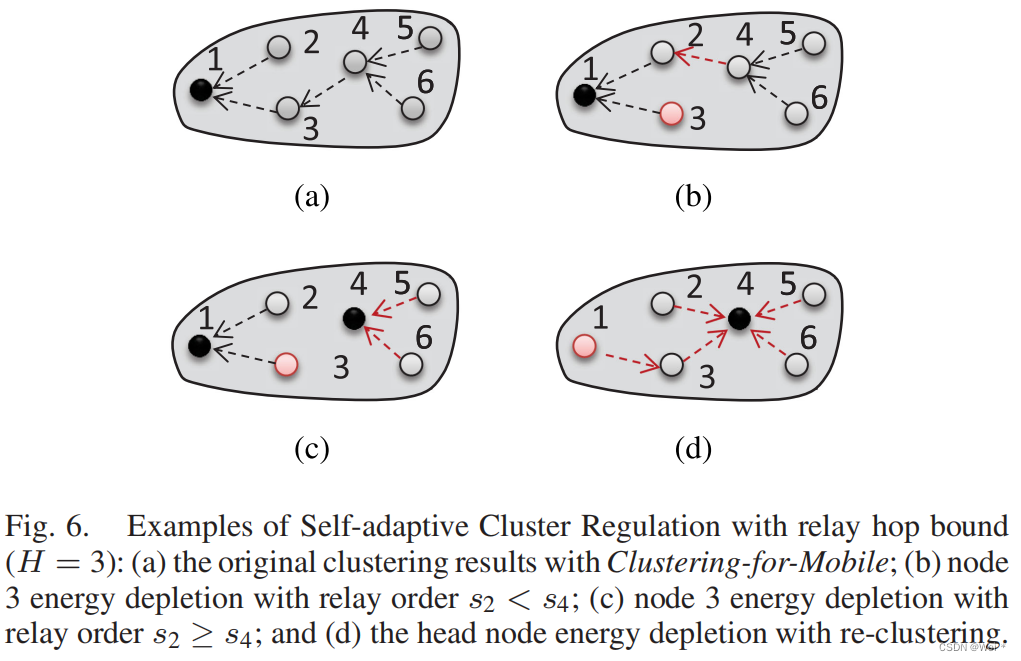
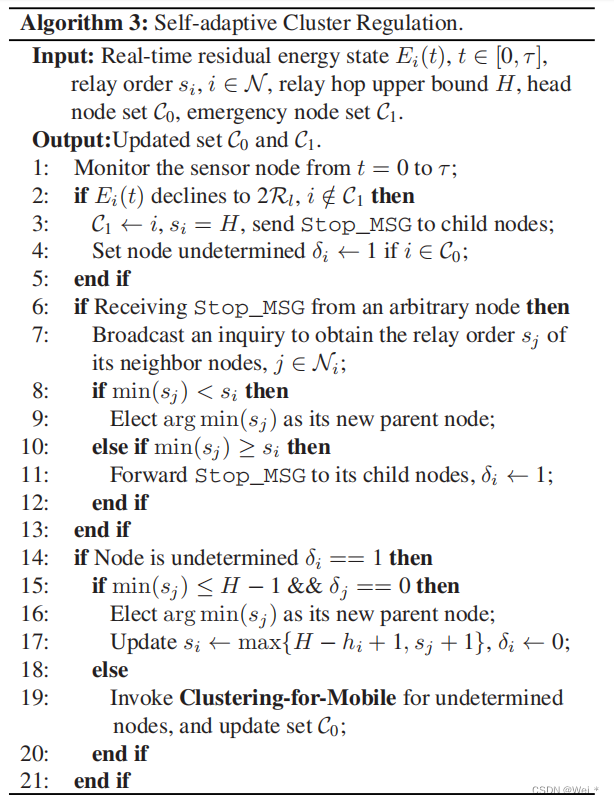
集群调节算法在从t = 0到τ的两个连续服务周期内并行监控每个传感器节点。我们用图6中的一个简化的例子来说明聚类调控的思想。如果一个传感器节点检测到其能量水平Ei (t)下降到Rl,它将发送一个简单的Stop_MSG到其子节点进行断开。如果该节点是一个中继节点,则将其添加到设置C1中,并作为一个叶节点放置(si = H)。更严重的是,如果节点是头节点,则集群将退役。因此,头节点将被标记为未确定的δi = 1,并向其相邻节点广播一个Stop_MSG。
对于任何节点接收到Stop_MSG,它将向其相邻的节点广播中继顺序sj,j∈Ni。如果存在一个具有sj < si的邻居,它将选择最低阶的邻居,即arg min(sj)作为数据中继的新父节点,如图6(b).所示相反,如果min(sj)≥si,如图6©所示,中继将被标记为未确定的δi = 1,然后将Stop_MSG转发到其子节点。然后,对于所有单个未确定的节点,他们还将判断它们是否可以直接连接到一个功能良好的≤H−1(sj)附近的中继上。如果没有,如图6©和(d)所示,将调用移动节点的聚类,用新选择的头节点重新聚类。
性质4:自适应聚类调节算法最坏情况的消息交换复杂度为O (N)。
此外,自适应聚类调节算法也很高效,最坏情况下的计算复杂度为O (1)。
以剩余能量阈值作为动态拓扑控制过程的准则。所提出的自适应集群调节算法还可以处理许多其他影响网络拓扑结构的因素,如节点插入和节点/链路故障。隔离的传感器节点将广播一个查询,以搜索一个新的父节点以进行数据中继。如果找不到功能良好的中继节点,则孤立的节点将与新选择的头节点重新聚类。综上所述,所提出的自适应聚类调节算法提高了M2C的鲁棒性。
D. Theoretical Analysis
从|C0| + |C1|的待访问节点总数出发,从理论上分析了M2C的性能。如上所述,我们的目标是确保所有传感器节点在每个服务周期内都不会耗尽能量,即wsn的可持续运行。下面的定理表明,与同样保证可持续运行的最优聚类方案相比,M2C的性能在最优解的常数范围内。笔记然而,为一个服务周期确定这样的最优解决方案是np困难的。3
定理2:与保证中继跳界H的网络持续运行的最优聚类方案相比,M2C涉及的节点数不超过最小访问节点数的3.28倍。
证明参照附录f。注意,所选头节点的最小数量C0分钟可以从覆盖平方的圆问题[40]中得到。在最优解下,由于不可忽略的重叠区域,簇中期望的传感器节点数应小于πd2 Hρ。所以3.28的竞争力是一个宽松的界限。
E. Service Cycles and Travel Path Planning 服务周期和旅行路径规划
在我们的设计中,基于移动车辆的服务是循环执行的,如图7所示。在每个周期的开始时,传感器节点将使用所提出的移动聚类算法自适应地形成聚类以进行数据收集。在这个周期中,自适应集群调节算法也将应用于意外的能量耗尽或节点故障。τ完成后,再次应用移动集群,移动车辆以行驶速度v离开水槽,完成上一个服务周期k−1的充电和数据收集任务。由于移动聚类的时间复杂度低,下一个周期的传感器数据聚合和移动车辆的离开几乎同时开始。移动车辆还标记了集群头节点C0和剩余能量较低C1的节点,将在下一个周期中访问。车辆完成访问任务后,将返回维修站,为下一个周期做好准备。请注意,移动性辅助的能量补充将不可避免地给数据收集造成额外的延迟。因此,M2C适用于wsn中的耐延迟应用,如森林中的温度、湿度监测或动物栖息地跟踪。
为了优化移动路径,每个无线充电和移动数据收集周期都只涉及C0和C1中的节点。此外,可以假设车辆在一个周期中只访问C0和C1中的每个节点并给每个节点充电一次。然后,需要确定所有地点的访问顺序。作为一种最优解,已证明了车辆应沿着连接加油站和C0和C1 [6]中所有节点的最短哈密顿循环移动。车辆可以沿着最短的哈密顿循环的路径沿顺时针或逆时针方向行驶,而不影响最优行驶路径的性能。最短哈密顿循环可以表述为著名的旅行商问题(TSP)。在这里,使用TSP最近邻算法[37]来获得移动车辆的最短旅行行程。这样,所提出的M2C方案就不需要集中的信息聚合来执行访问操作。
5.PERFORMANCE EVALUATION 仿真结果
在本节中,使用真实世界的参数设置,通过离散事件模拟器Pymote 2.0 [41]进行了广泛的评估,以评估所提出的M2C方案。
A. Parameter Setup
除非另有说明,无线可充电传感器网络是在100 m×100 m的二维正方形场景上构建的。固定水槽(服务站)位于该区域的原点(0.0)m处。传感器节点数为100个。传感器节点将消耗= 0.05 J用于数据包生成,等= 0.02 J用于包传输/接收,通信接近r0 = 15 m [4]。数据包生成过程遵循泊松分布,平均λ=为3 pkt/min [4]。基于时分多址(TDMA)的协议[42]用于集群传感器网络中的数据采集。对于所提出的M2C方案,常数被设置为D = 16、Φ = 10和Q = 3。传感器节点由能量容量为Emax = 8,000 J的超级电容器供电,需要tc = 10分钟的充电,效率为90% [11],[43]。一个周期τ的时间为10 h。所有节点最初都充满电。该移动车辆由一个商用可充电的12 V 4.5 Ah LiFePO4电池供电,能量容量为194.4 KJ。车辆行驶速度v为1 m/s,能耗为50 W/s。模拟的总运行周期为1000小时(100个循环)。
B. Performance Comparison
为了评价M2C的性能,我们研究了两个基线的WerMDG [2]和EDIT [22]。WerMDG是一种集中式方案,它根据传感器节点的剩余能级来选择头节点。移动车辆根据传感器节点的电池能量对传感器节点进行排序,在排序后的传感器列表中搜索最大锚点数量,使最短移动路径不超过一个阈值。为了与M2C进行公平的性能比较,阈值被设置为最小值,同时确保没有传感器节点会耗尽能量。分布式聚类协议EDIT还根据传感器节点的剩余能量来选择头部节点。EDIT代表了一组经典的聚类解决方案,其中具有更多剩余能量的节点更有可能被选为聚类头节点,以最大限度地延长wsn的寿命。类似于M2C,WerMDG和EDIT使用多跳通信来进行集群内路由。然后,从五个方面对其性能进行评价:
行驶距离:对于移动的车辆,通过其行驶距离来评估服务效率。较短的旅行距离意味着更高的能量传递效率,因为移动的车辆在旅行过程中也会消耗不可忽略的能量。
服务时间:服务时间定义为从移动车辆离开服务站到完成所有充电和数据收集任务并返回服务站的时间。服务时间包括:车辆在路径上花费的行驶时间,以及车辆停留在C0中头部节点和C1中紧急节点的停留时间。每个周期中的服务时间越少,无线充电和移动数据收集的效率就越高。
充电延迟:通过传感器节点的充电延迟来评估无线充电过程。充电延迟定义为从其能级下降到2Rl到其通过移动车辆获得能量补充的时间段。延迟包括两部分:车辆到达前的等待时间和实际充电时间。充电延迟越短,充电过程就越有效。
剩余能量:在下一个充电服务开始之前,每个周期结束时的剩余能量越多,网络就会越强大。特别是,如果最小剩余能量始终高于0,这意味着wsn可以实现可持续的网络运行。
充电能源效率:通过考虑补充的能量和移动车辆行驶、充电和数据收集的总能耗来研究能源效率。
1)网络可扩展性:然后,用不同的网络尺度来评估M2C的可扩展性,其中传感器节点数从80到200不等。将网络大小固定在100 m×100 m,图8(a)-(e)显示了最终的充电器平均行驶距离和服务时间,总共100个周期中每个传感器节点的平均充电延迟,剩余能级和充电能量效率。如表二所示,随着部署节点的更多,需要更多的集群头节点来保证整个网络的覆盖。此外,随着节点密度的进一步增加,数据聚合的通信负担也在增加,应急节点的数量也在增加。因此,旅行距离,每周期的使用时间和充电延迟逐渐增加,平均剩余能量逐渐下降。与旅行和数据收集的能量消耗相比,有更多的节能头部和紧急节点,更多的能量被补充到wsn。充电的能源效率也提高了。
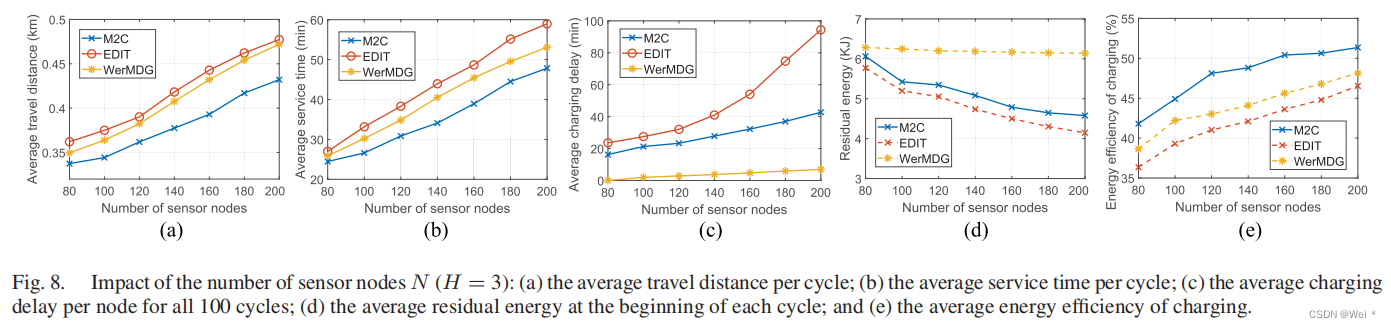
当传感器节点数为200时,EDIT服务周期的最大能耗为187.7 KJ,接近车辆的能量容量。这意味着应该部署更多的车辆来进一步提高网络的可伸缩性。大型网络可以分为几个子区域。然后,采用多辆车合作进行充电和数据采集服务。
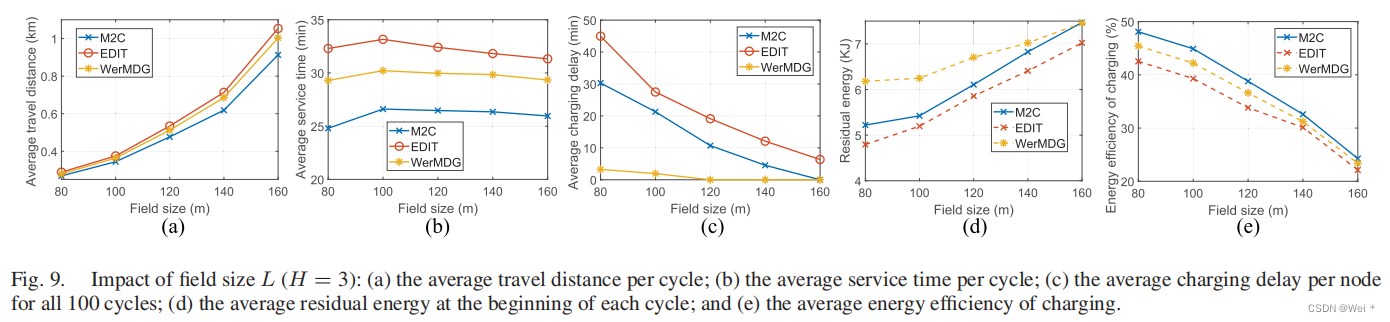
将传感器节点数固定在100个,以80 m×80 m到160 m×160 m的不同网络大小评估M2C的性能,如图9所示。随着网络规模的扩大,旅行距离逐渐增加。然而,随着节点密度的降低,如表三所示,将选择更多的头节点,减少通信和能源消耗负担。当网络大小为160 m×160 m时,已部署的传感器节点之间的距离更有可能大于通信范围r0。平均将选择35个以上的头节点,以确保数据采集的网络覆盖,造成不必要的长途旅行距离912.9 m。因此,对于网络连通性,在评估中不考虑更大的网络规模。
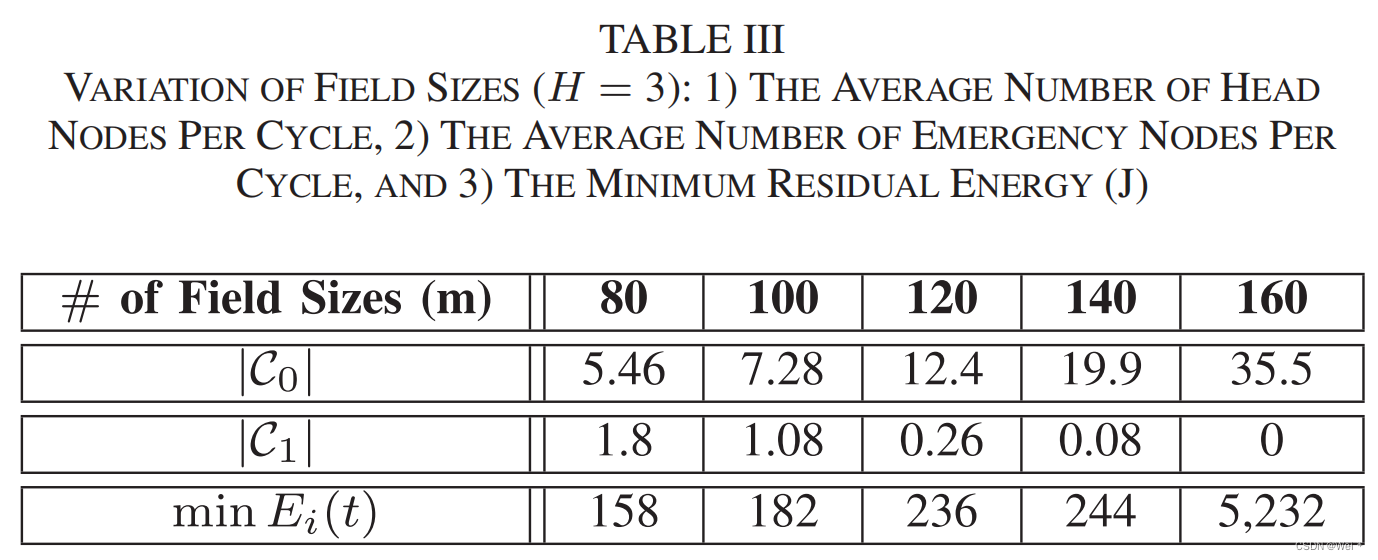
紧急节点的数量因此而减少。紧急节点需要更长的停留时间,即大约10分钟来补充能量。因此,每个周期的服务时间首先随着头节点数量的增加而增加,然后随着应急节点数量的减少而略有减少。如图9(d)所示,平均剩余能量上升。随着节点寿命的延长,充电延迟减少。能源效率随着每个节点的充电能量越少,而旅行的能量消耗越多,充电就会显著减少。
此外,还可以看出,M2C在所有所研究的网络尺度上实现了最短的旅行距离、服务时间和最高的充电能源效率。由于WerMDG更喜欢耗能节点作为头节点,因此将选择更多的头节点,以确保网络的可持续运行。例如,当N = 100和L = 160 m时,与WerMDG相比,M2C(H = 3)分别将充电器的行驶距离和使用时间减少了约9.02%和11.53%。通过WerMDG,选择耗能量节点作为头节点,可以及时得到能量补充。因此,如图所示。8和9,WerMDG达到最低的充电延迟,剩余能级最高。当现场大小为160 m×160 m时,带有WerMDG和M2C的应急节点数下降到0,没有充电延迟。平均剩余能量都处于相似的高水平(约7460J)。
然后,与EDIT相比,M2C试图选择当移动车辆访问它们时能量即将耗尽的集群头。因此,移动车辆需要访问的传感器节点数量较少,有助于减少旅行距离、充电延迟和服务时间,同时提高能源效率。例如,当N = 200和L = 100 m时,与EDIT相比,M2C(H = 3)将充电器行驶距离、服务时间和充电延迟分别减少了约9.46%、18.85%和54.75%。
2)其他因素的影响:为了充分评估提出的M2C方案的性能,其他几个因素,包括继电器跳上限H,最大充电时间tc,能耗估计变化,Inhibit_MSG传输失败,和链接失败,可能影响服务过程,也考虑了固定设置N = 100和L = 100 m。
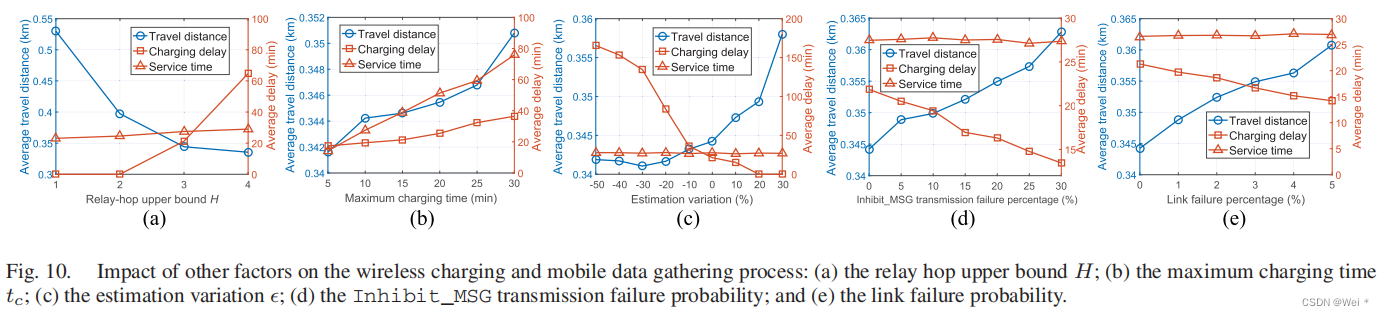
继跳上限的影响:继跳上限对网络性能影响很大。一个更大的边界表示旅行距离较小,但数据聚合的能量效率较低。根据(2),H的最大值为4。如图10(a)所示,当H从1增加到4时,行程距离减少了36.71%(从529.98 m增加到335.42 m),服务时间增加了20.36%(从23.12 min增加到29.03 min),充电延迟从0增加到64.74 min。因此,让H = 2或3可以实现无线充电和移动数据收集服务的平衡性能。
最大充电时间的影响:影响服务能力的另一个因素是最坏情况下的充电时间tc。tc从5 min到30 min,评价结果如图10(b)所示(含H = 3)。由于车辆需要花费更多的时间给传感器节点充电,行驶距离、服务时间和充电延迟分别增加了2.69%(从341.61 m增加到350.79 m)、433.59%(从14.22 min增加到75.91 min)和109.99%(从17.35 min增加到36.45 min)。
估计变化的影响:注意,R[ p H]和R[ r h]只是基于传感器节点均匀分布的估计能量消耗。事实上,其他的分布可能会导致能量消耗估计的变化。随着能耗估计的变化,,,能耗估计被更新为
在H = 3和tc = 10 min中,图10©显示了用M2C方案得到的结果,其中从−的50%变化到30%。当<为0时,头节点更有可能在服务周期中耗尽其能量。能量耗尽的磁头节点会导致更多的充电延迟。然后,所提出的自适应聚类调节算法将刷新网络拓扑,选择更多的头节点用于充电和数据收集。因此,出现的紧急节点会更少,如表四所示。随着从+30%下降到−50%,旅行距离将略有下降4.51%,而充电延迟将显著增加。一般来说,估计的能耗(= 0)可以在旅行距离和充电延迟之间取得平衡,这验证了M2C方案的有效性。
Inhibit_MSG传输失败的影响:如第三节-b节所述,一旦创建了一个集群,就可以通过指定一个专用的时隙来避免数据包冲突此集群中的每个节点。然而,在集群形成之前,包碰撞可能无法完全避免包冲突。在提出的M2C方案中,一旦一个传感器节点被选为头节点,它将广播Inhibit_MSG用于创建集群。在理想的情况下,一旦选择了头节点,所有未确定的邻居节点都将加入集群。然而,由于传感器节点之间的传输碰撞或网络干扰,Inhibit_MSG的传播可能会失败。因此,我们提供了定量分析来评估Inhibit_MSG传输故障如何影响我们设计的性能。
假设Inhibit_MSG的每一次传输都有一定的失效概率。随着传输失败概率从0%增加到30%,从头节点接收Inhibit_MSG的节点更少。因此,需要选择更多的磁头节点,以确保整个网络的覆盖范围。如图10(d)所示,行程距离边缘上升了5.4%。此外,由于较小的簇尺寸可以有效地降低传感器节点的能耗,因此充电延迟降低了38.47%。这表明M2C仍然可以很好地对消息传输故障很好地工作。在今后的工作中,我们将进一步探讨如何避免集群化过程中可能出现的传输失败。
链路故障的影响:在数据收集期间,网络连接可能会由于链路故障而受到影响。如Sec所述。IV-C,一旦一个链路失效,所提出的自适应集群调节算法将刷新一个新的中继节点的网络拓扑。如果找不到功能良好的中继节点,则孤立的节点将与新选择的头节点重新聚类。如图10(e)所示,当链路故障概率从0%增加到5%时,充电和数据采集的头节点越多,行程距离增加了4.5%。充电延迟减少了33.18%。
6.总结
本文提出了一种新的有源M2C方案来解决无线充电和移动通信的基本挑战在wsn中的数据收集。考虑到wsn的动态特性,所提出的M2C方案可以主动以分布式方式调整网络拓扑结构,以延长传感器节点的使用寿命。M2C方案与wsn的分布式特性匹配良好,而不需要任何全局网络信息。然后,为了优化旅行距离和充电延迟,在每个无线充电和移动数据采集周期中,只涉及能耗较高的集群头节点和剩余能量较低的应急节点。最后,对M2C的性能和可扩展性进行了理论分析和评价。
补充 & 疑问
疑问:当确定了节点之间如何传输数据之后,节点的能耗就是固定的了,为什么还需要估计能耗呢?
(优点:每个节点决定自己是否适合当簇头节点,不需要集中式决策的节点)




























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











