







前言
将NXP出的uboot添加自己的板子,移植到I.MX6ull的mini板中,使用的屏幕为4.8寸,分辨率为800x480的LCD显示屏。
行文目录
- 前言
- 准备工作
- 在Uboot中添加自己的开发板
- 添加文件
- 添加开发板默认配置文件
- 添加开发板对应的头文件
- 添加开发板对应的板级文件夹
- 修改U-Boot图形界面配置文件
- LCD与网络驱动修改
- 参考文献
准备工作
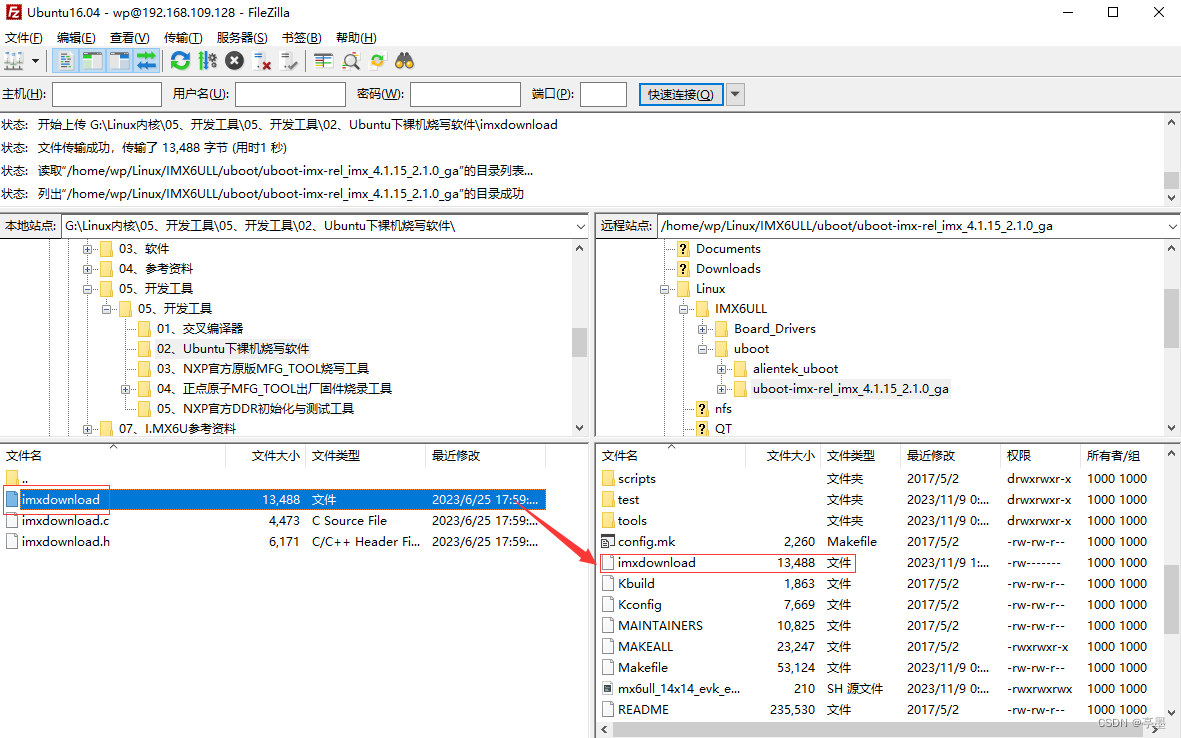
首先利用FileZilla,将uboot-imx-rel_imx_4.1.15_2.1.0_ga.tar.bz2压缩包放进虚拟机中,这里我放到了uboot文件夹中。

之后我们将这个压缩包进行解压,解压到当前目录中,随后我们打开VSCode,创建一个新工程,方便我们后续修改。依次按下面的方式打开我们刚刚解压的文件。
File->Open Folder
打开后我们先将工程保存一下,依次按下面的顺序点击保存工作空间,工作空间的文件名字可以按照自己的想法命名,此处我命名为u-boot.code-workspace
File->Save WorkSpace As

进入到configs文件夹中,里面有很多配置文件,我们使用的是mx6ulll系列的,因此向下找到mx6ull开头的配置文件。mx6ull有9x9mm和14x14mm的,整点原子的是14x14mm并且楼主使用的是emmc版,因此我们要修改mx6ull_14x14_evk_emmc_defconfig作为默认配置文件。

为了方便编译,我们在顶层的makefile中指定架构和交叉编译器,在其中的环境变量是ARCH和CROSS_COMPILE,如下所示:

接下来我们要进入到解压后的路径,使用make指令,调用这个makefile编译uboot,具体指令如下:
make mx6ull_14x14_evk_emmc_defconfig
make V=1 -j16
看到下面的提示信息就可以确定我们编译成功了。

创建一个脚本,其中的内容是刚刚编译uboot的指令,
vi mx6ull_14x14_evk_emmc.sh
#!/bin/bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_14x14_evk_emmc_defconfig
make V=1 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j16
写完之后保存文件
按完esc后点击 :wq
然后我们给这个文件执行权限,可以直接给777,需要看到文件的颜色变成绿色,即表示有执行权限了。
chmod 777 mx6ull_14x14_evk_emmc.sh

将imxdownload文件拷贝到uboot的根目录下,即刚解压的文件夹目录下。
在插入sd卡之前,使用下列指令,查看已有的挂载磁盘,之后插入sd卡后,也要查看一次,看看新的sd卡挂载在哪里


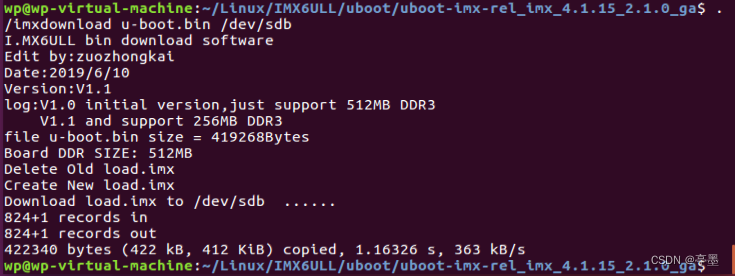
所以我们可以看到,楼主这里的sd是/dev/sdb,下面的sdb1和sdb2是两个分区,此时我们需要用imxdownload将编译后的可执行文件u-boot.bin下载进sd卡中。
./imxdownload u-boot.bin /dev/sdb
出现如下所示即是下载成功

我们将开发板调整为SD卡启动(拨码开关调整为:10000010)

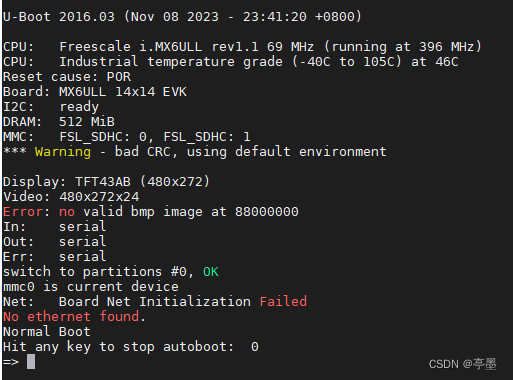
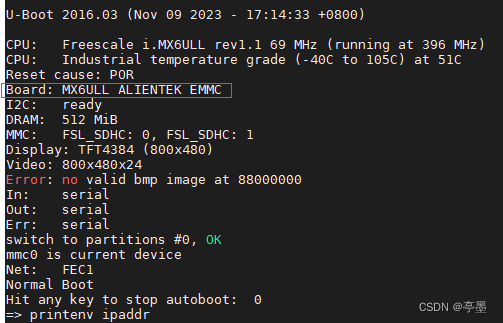
我们将SD卡或者TF卡插入板子中,清空mobaXterm或者SecureCRT的界面,按下复位按键,可以看到如下信息,在最后出现Hit any key to stop autoboot的那一行会出现3秒倒计时,我们不需要启动内核,因此直接按下回车即可进入uboot模式。

此时板子的屏幕上会出现这种画面,因为楼主用的是4.3寸的屏幕,而NXP官方的I.MX6ULL的屏幕就是4.3寸 480x272分辨率,因此LCD驱动是正常的。
在Uboot中添加自己的开发板
添加文件
添加开发板默认配置文件
在configs目录下创建默认配置文件,复制的是我们上文用到的mx6ull_14x14_evk_emmc_defconfig,修改命名为mx6ull_alientek_emmc_defconfig,我们后续的修改就是在这上面修改
cd configs
cp mx6ull_14x14_evk_emmc_defconfig mx6ull_alientek_emmc_defconfig
然后我们回到VSCode,在configs文件夹下找到我们刚创建的mx6ull_alientek_emmc_defconfig文件,修改为以下内容,主要是原来第一行和第四行:
CONFIG_SYS_EXTRA_OPTIONS="IMX_CONFIG=board/freescale/mx6ull_alientek_emmc/imximage.cfg,MX6ULL_EVK_EMMC_REWORK"
CONFIG_ARM=y
CONFIG_ARCH_MX6=y
CONFIG_TARGET_MX6ULL_ALIENTEK_EMMC=y
CONFIG_CMD_GPIO=y
添加开发板对应的头文件
我们退回到uboot解压的根目录下,进入include/configs下添加我们板子对应的头文件,复制include/configs/mx6ullevk.h,重命名为mx6ull_alientek_emmc.h
cp include/configs/mx6ullevk.h include/configs/mx6ull_alientek_emmc.h
之后将最上面的两行宏定义改为如下所示
#ifndef __MX6ULL_ALIENTEK_EMMC_CONFIG_H
#define __MX6ULL_ALIENTEK_EMMC_CONFIG_H
后续的修改如下所示,后面的注释会标明在第几行
添加开发板对应的板级文件夹
回到原来的uboot的根目录,然后进入到board文件夹下freescale文件夹,复制mx6ullevk文件夹,重命名为mx6ull_alientek_emmc,这个文件夹就是我们要修改的板级文件夹,同时将里面的mx6ullevk.c重命名为mx6ull_alientek_emmc.c。
cd board/freescale/
cp mx6ullevk/ -r mx6ull_alientek_emmc
cd mx6ull_alientek_emmc
mv mx6ullevk.c mx6ull_alientek_emmc.c
接下来对mx6ull_alientek_emmc目录下的文件做一些修改
首先是该目录下的Makefile,修改的地方为第一行,这样才会编译我们刚刚的mx6ull_alientek_emmc.c文件:
obj-y := mx6ull_alientek_emmc.o
在同文件夹下的imximage.cfg文件,将第三十四行改为如下所示,将路径要改为当前的mx6ull_alientek_emmc。
PLUGIN board/freescale/mx6ull_alientek_emmc/plugin.bin 0x00907000 # 第三十四行
同样在当前文件夹下的Kconfig文件,修改内容如下,主要修改的是第一行,添加config SYS_SOC,修改config SYS_BOARD和config SYS_CONFIG_NAME下的内容:
if TARGET_MX6ULL_ALIENTEK_EMMC
config SYS_BOARD
default "mx6ull_alientek_emmc"
config SYS_VENDOR
default "freescale"
config SYS_SOC
default "mx6"
config SYS_CONFIG_NAME
default "mx6ull_alientek_emmc"
endif
修改MAINTAINERS文件,修改结果如下:
MX6ULL_ALIENTEK_EMMC BOARD
M: Peng Fan <peng.fan@nxp.com>
S: Maintained
F: board/freescale/mx6ull_alientek_emmc/
F: include/configs/mx6ull_alientek_emmc.h
修改U-Boot图形界面配置文件
回到根目录,打开arch/arm/cpu/armv7/mx6/Kconfig文件,在207行添加内容:
config TARGET_MX6ULL_ALIENTEK_EMMC
bool "Support mx6ull_alientek_emmc"
select MX6ULL
select DM
select DM_THERMAL
最后在endif之前添加如下内容:
source "board/freescale/mx6ull_alientek_emmc/Kconfig"
至此我们可以编译这个新加板子后的uboot了,返回到根目录下,新建一个新的脚本文件名叫mx6ull_alientek_emmc.sh用来执行make指令。其他地方都和之前的脚本一样,不一样的是第二个make是我们新的板级文件mx6ull_alientek_emmc_defconfig:
#!/bin/bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_alientek_emmc_defconfig
make V=1 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j16
之后我们给这个文件执行权限并执行编译uboot
chmod 777 mx6ull_alientek_emmc.sh
./mx6ull_alientek_emmc.sh


LCD与网络驱动修改
struct display_info_t const displays[] = {{
.bus = MX6UL_LCDIF1_BASE_ADDR,
.addr = 0,
.pixfmt = 24,
.detect = NULL,
.enable = do_enable_parallel_lcd,
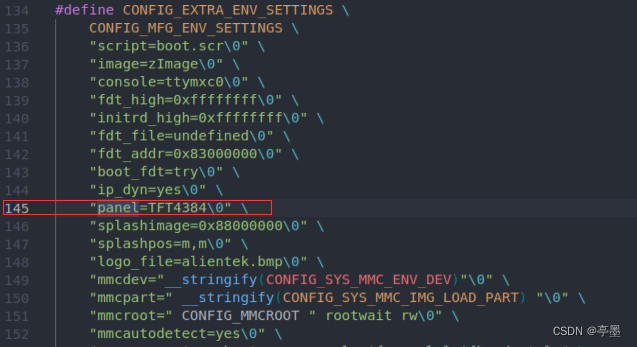
.mode = {
.name = "TFT4384",
.xres = 800,
.yres = 480,
.pixclock = 32258,
.left_margin = 88, // HBP
.right_margin = 40, // HFP
.upper_margin = 32, // VBP
.lower_margin = 13, // VFP
.hsync_len = 48, // HSP
.vsync_len = 3, // VSP
.sync = 0,
.vmode = FB_VMODE_NONINTERLACED
}
} };
int checkboard(void)
{
if (is_mx6ull_9x9_evk())
puts("Board: MX6ULL 9x9 EVK\n");
else
puts("Board: MX6ULL 14x14 EVK\n");
return 0;
}
bootcmd=run findfdt;mmc dev ${mmcdev};mmc dev ${mmcdev}; if mmc rescan; then if run loadbootscript; then run bootscript; else if run loadimage; then run mmcboot; else run netboot; fi; fi; else run netboot; fi
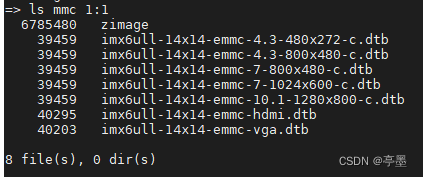
setenv bootcmd 'mmc dev 1; fatload mmc 1:1 80800000 zImage; fatload mmc 1:1 83000000 imx6ull-alientek-emmc.dtb; bootz 80800000 -83000000;'
setenv bootargs 'console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw'
参考文献
[1] 【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.81















 2214
2214











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









