







-----------------------------改进区域增长算法,更好地分割肺实质-----------------------
这两种算法作用:输入有噪声的图像,通过算法求解出种子点,然后进行区域增长算法处理图像。
LRS算法--------去除图像中气管,支气管噪音现象(肺上部和中部)
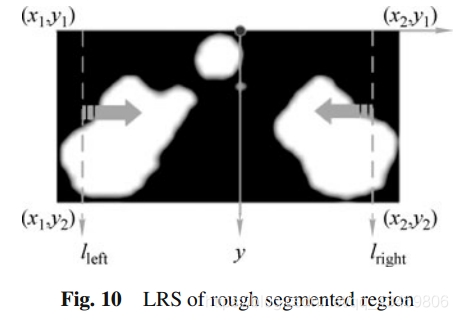
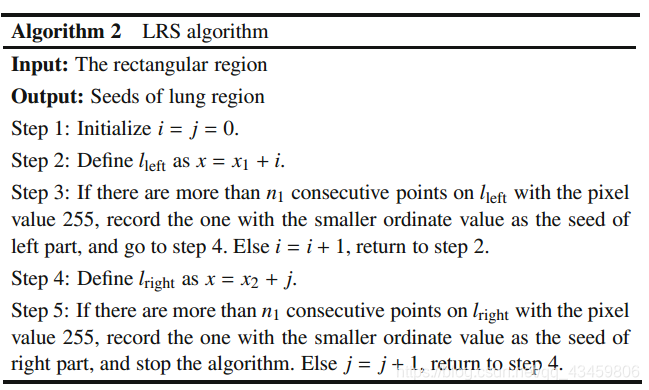
算法2 LRS算法
输入:矩形区域
输出:肺部种子
步骤1:初始化i = j = 0。
步骤2:将lleft定义为x = x1 + i。
步骤3:如果在lleft上有n个连续点,像素值为255,则将纵坐标值较小的点记录为左部分的种子,然后转到步骤4。否则,i = i + 1,返回到步骤 2。
步骤4:将lright定义为x = x2 + j。
步骤5:如果在lright上有n1个连续点,像素值为255,则将纵坐标值较小的点记录为右部分的种子,然后停止算法。 否则j = j + 1,返回到步骤4。
其中,n=5。
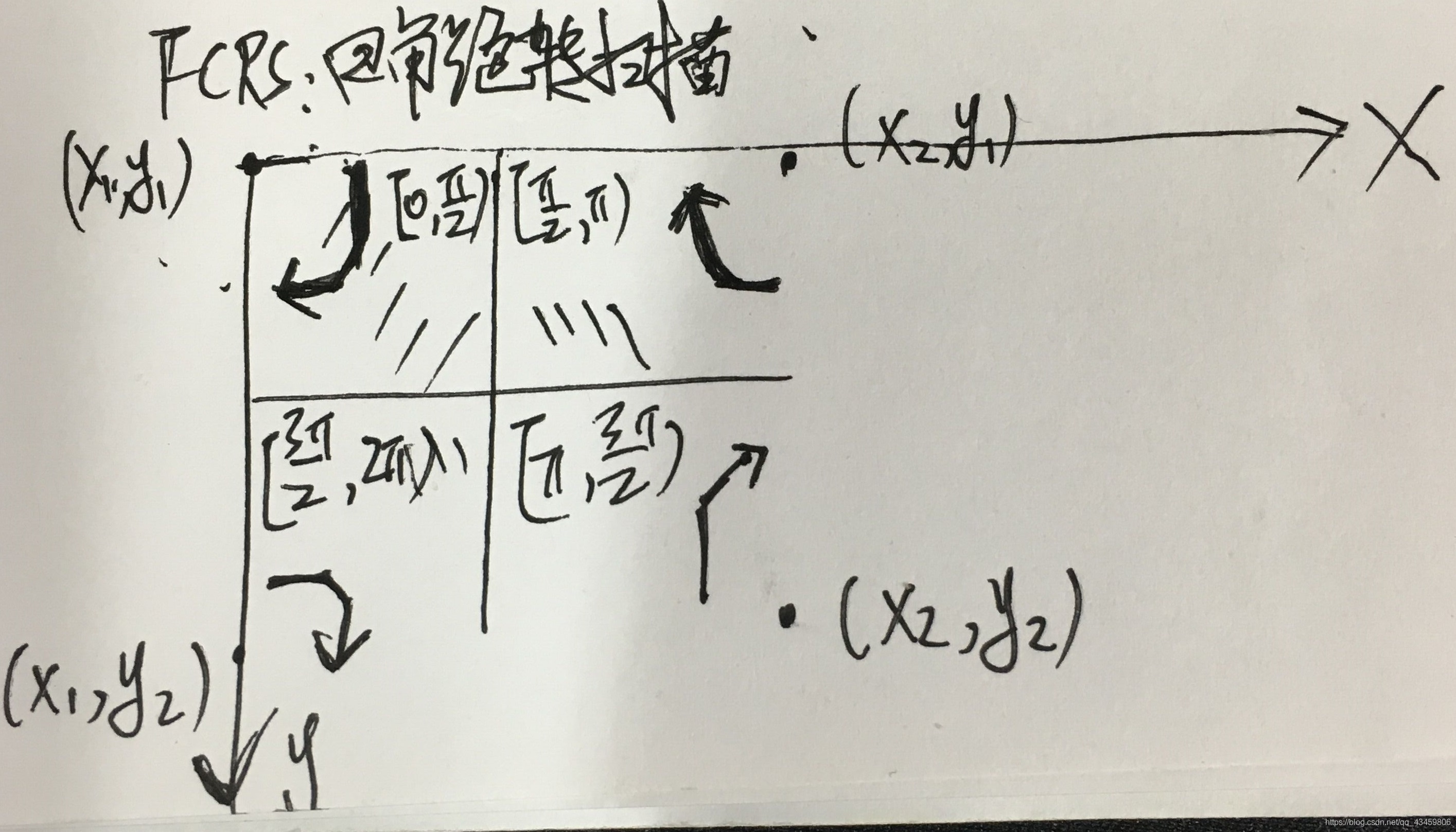
FCRS算法---肺底部
过程:
①让直线分别从这四个方向旋转,如果该直线有n2个连续点且像素值为255,则将其较小的纵坐标记为(xθ,yθ)。
②计算(xθ,yθ)和(x1,x2)距离dθ。
比较所有dθ的值,并以最小dθ的点作为种子点。
在FCRS算法之后,找到图像中肺区域的一到四个种子点。
其中n2 = 3。
进行区域增长;
8领域内,判断种子点P的像素值等于Pi(i = 1、2,...,8)的像素值,则将Pi添加到R种子区域。
扩张和腐蚀
去噪后获得的肺轮廓可能具有一些突起和锋利的边缘,而真实的人体器官则相对光滑。 为了使轮廓平滑,使用扩张和腐蚀来消除毛刺。 膨胀是使所有背景点合并到对象中并使边框扩展到外部的过程。 可以使用膨胀来填充对象的动画。 侵蚀是消除边界点以使边界收缩到内部的过程,可以用来消除小的无意义的对象。

















 9738
9738

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









