







- batch vs. mini-batch
batch指遍历完全部的数据集之后再进行梯度下降的方法,mini-batch是将数据集分成若干小的子集,分别进行梯度下降,这样可以提升速度。
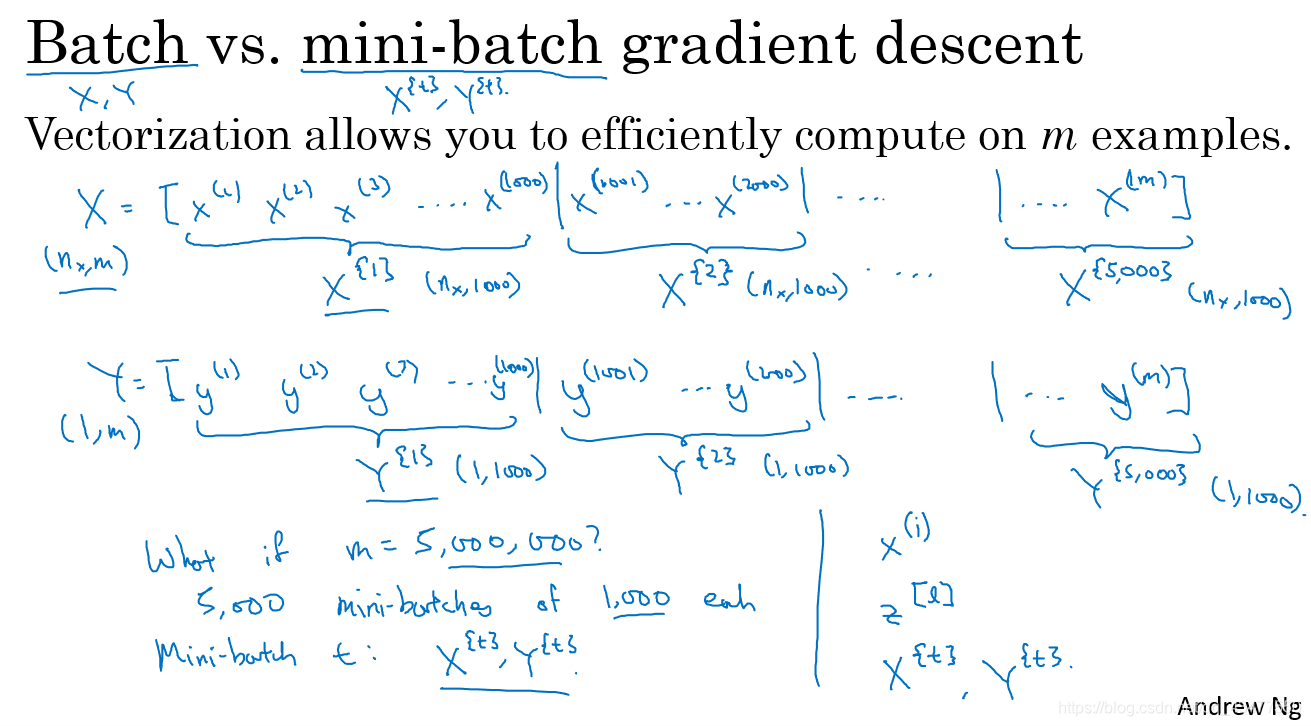
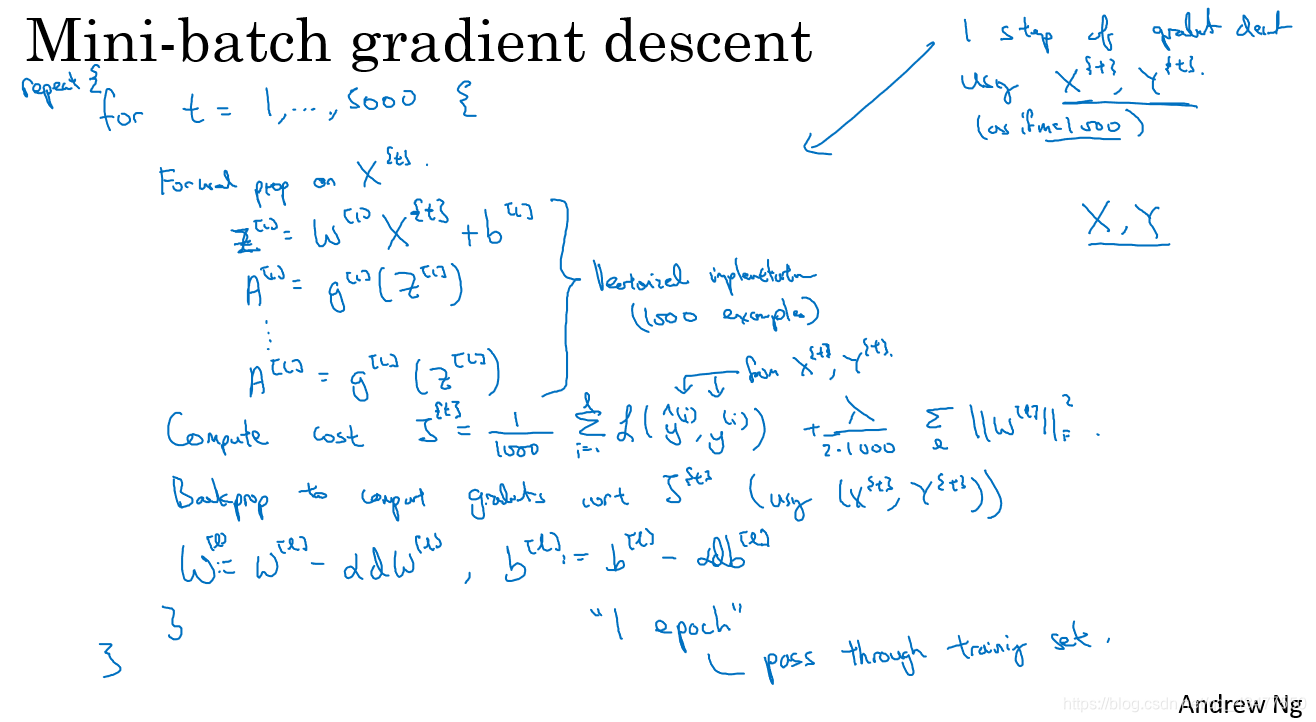
epoch表示遍历完一整个训练集,当使用batch梯度下降时,1个epoch只进行了1次梯度下降,当使用mini-batch时,1个epoch可以进行t次梯度下降。
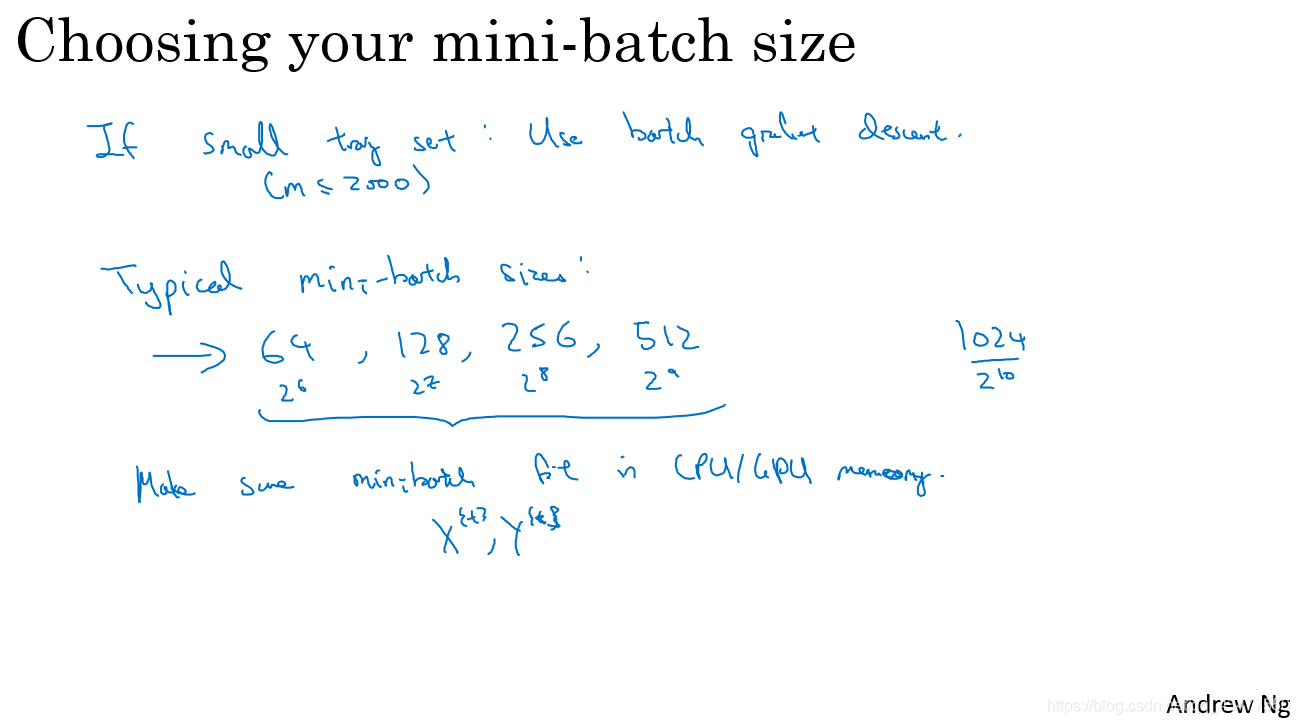
- mini-batch size 的选择
mini-batch size = m时,为batch gradient descent 缺点:耗时长
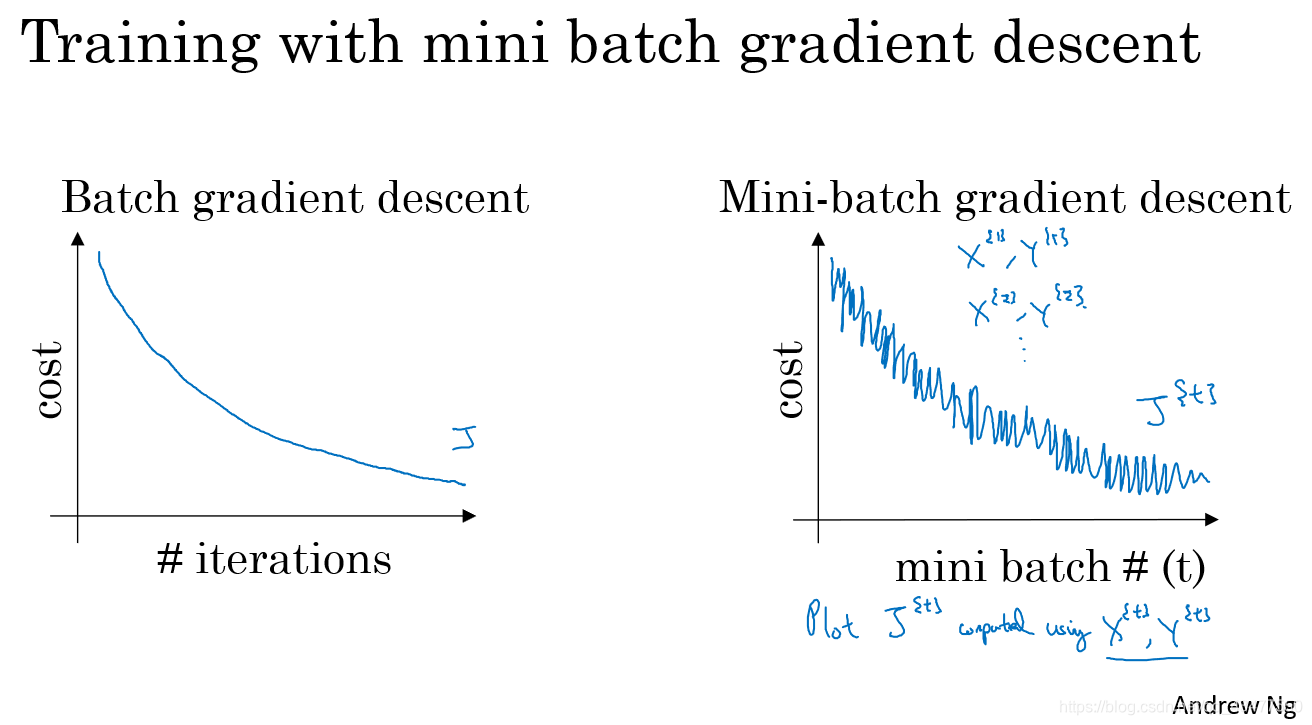
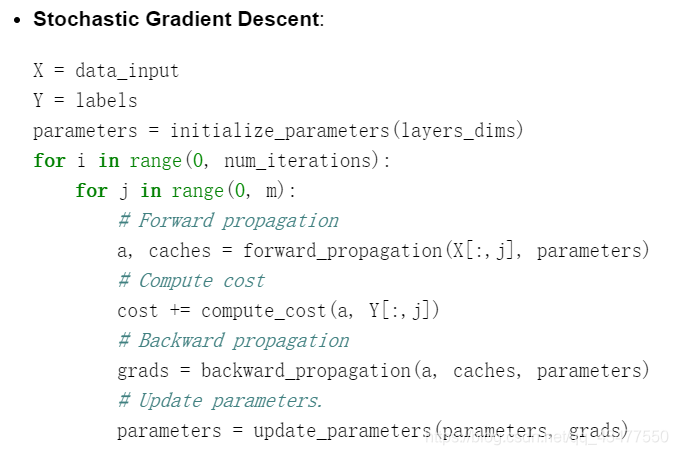
mini-batch size = 1时,为stochastic gradient descent (随机梯度下降)缺点:丢失了向量化带来的加速。并且永远不会收敛,只会在最小值附近徘徊。
所以先择中间值比较好。
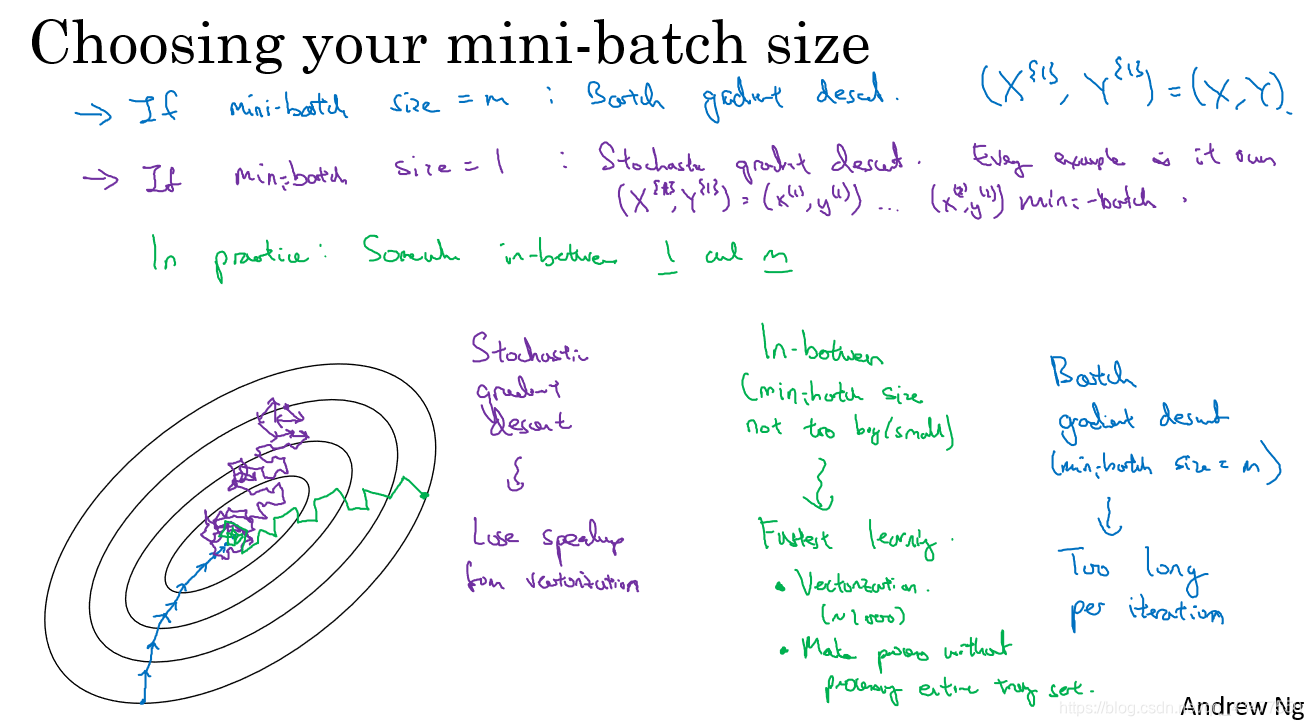
当m<2000时,选择batch gradient descent
当m>2000时,使用mini——batch gradient descent,大小一般为2的倍数,64,256,512等。
需要注意的是,size的大小要和cpu/gpu的内存相匹配。
mini-batch要经过两步
(1)shuffle
permutation = list(np.random.permutation(m))
shuffled_X = X[:, permutation]
shuffled_Y = Y[:, permutation].reshape((1,m))
(2)Partition
num_complete_minibatches = math.floor(m/mini_batch_size) # number of mini batches of size mini_batch_size in your partitionning
for k in range(0, num_complete_minibatches):
### START CODE HERE ### (approx. 2 lines)
mini_batch_X = shuffled_X[:,k*mini_batch_size:(k+1)*mini_batch_size]
mini_batch_Y = shuffled_Y[:,k*mini_batch_size:(k+1)*mini_batch_size].reshape((1,-1))
### END CODE HERE ###
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch)
# Handling the end case (last mini-batch < mini_batch_size)
if m % mini_batch_size != 0:
### START CODE HERE ### (approx. 2 lines)
mini_batch_X = shuffled_X[:,num_complete_minibatches*mini_batch_size:m]
mini_batch_Y = shuffled_Y[:,num_complete_minibatches*mini_batch_size:m].reshape((1,-1))
### END CODE HERE ###
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch)
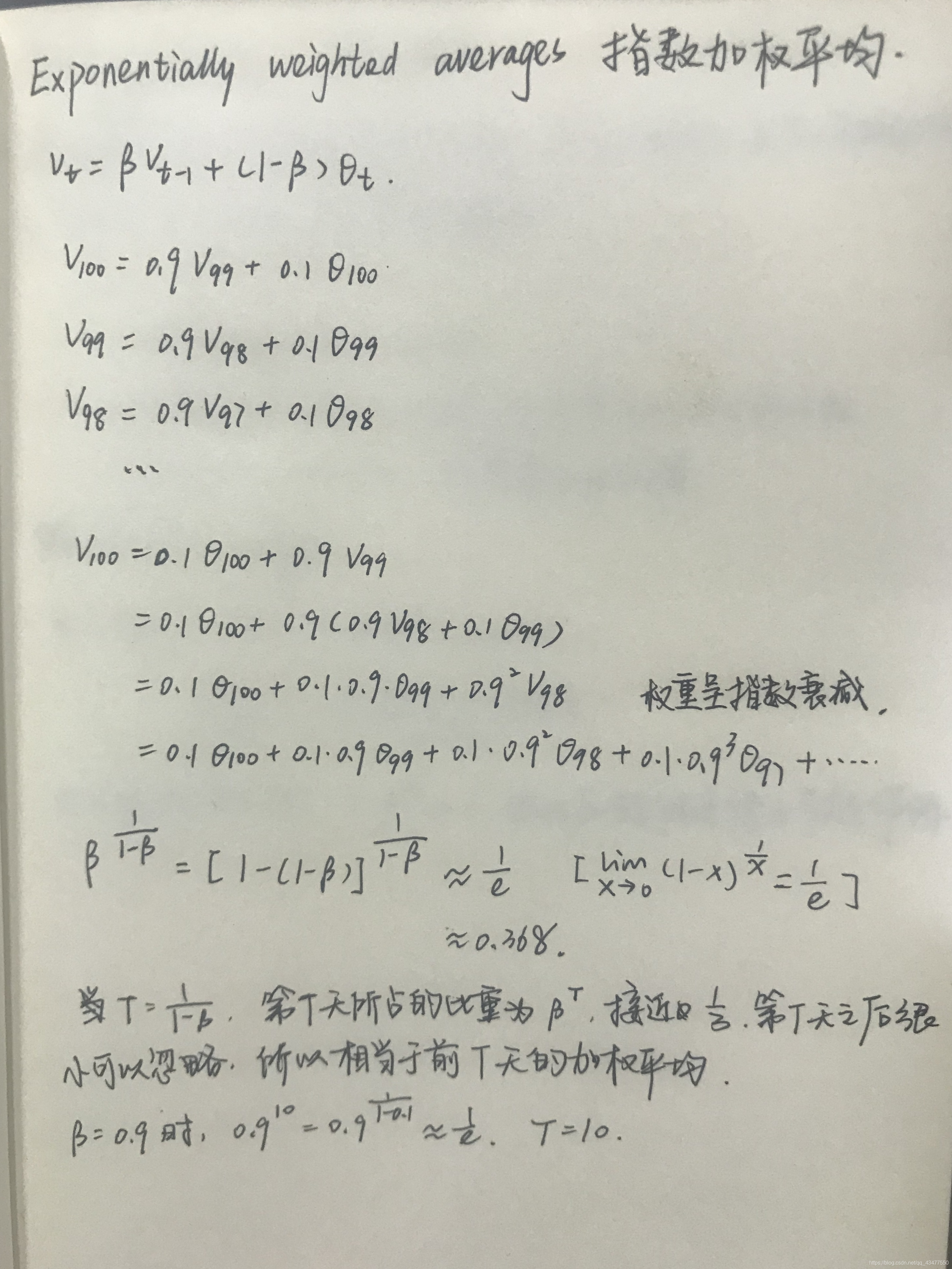
- 指数加权移动平均 Exponentially Weighted Moving Averages
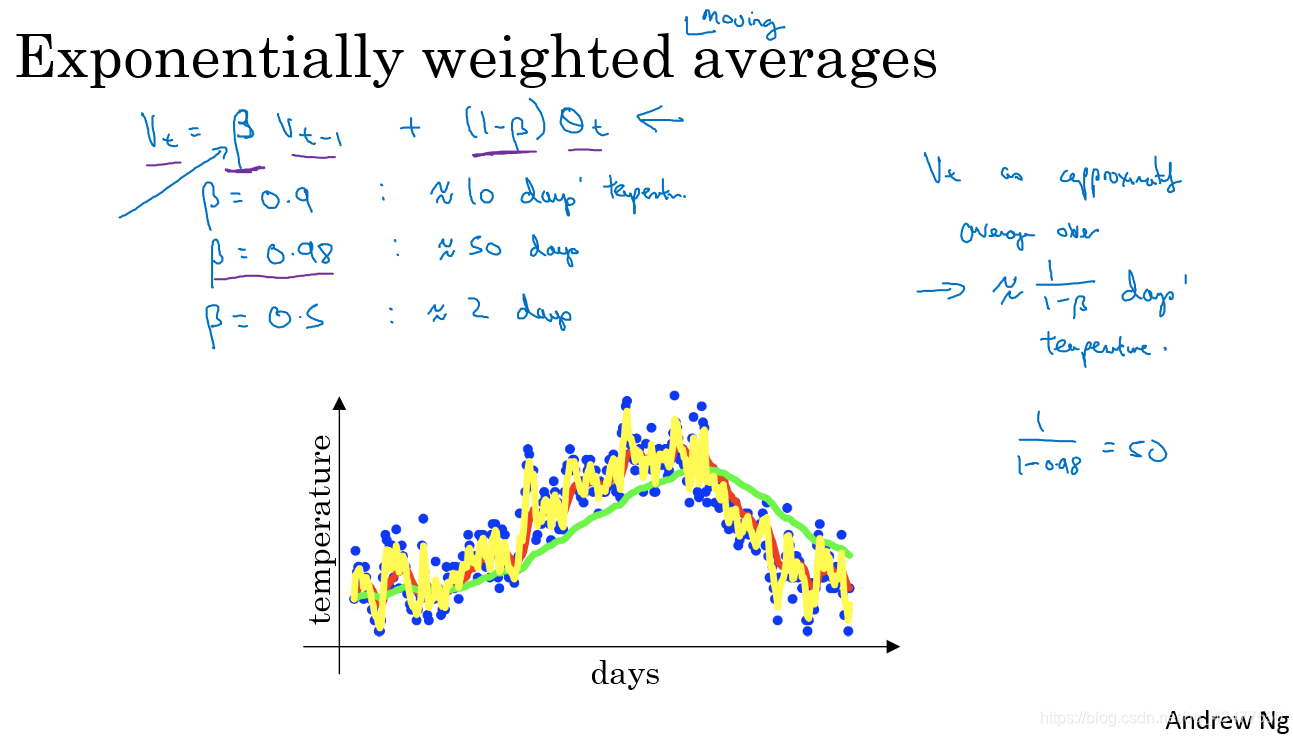 vt表示当天的温度平均值约等于前T天温度数据加权平均,T≈1/(1-β).
vt表示当天的温度平均值约等于前T天温度数据加权平均,T≈1/(1-β).
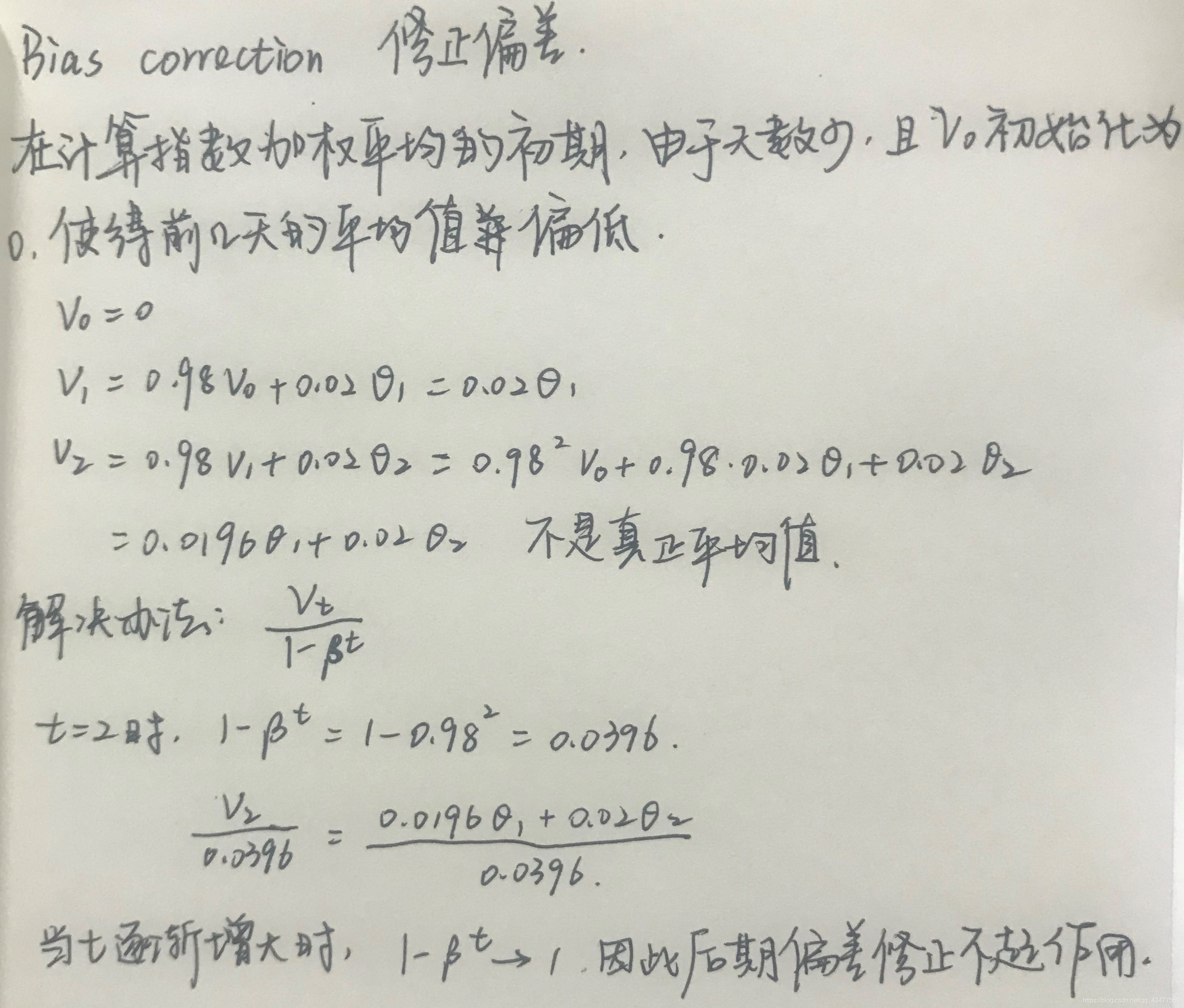
4. 偏差修正
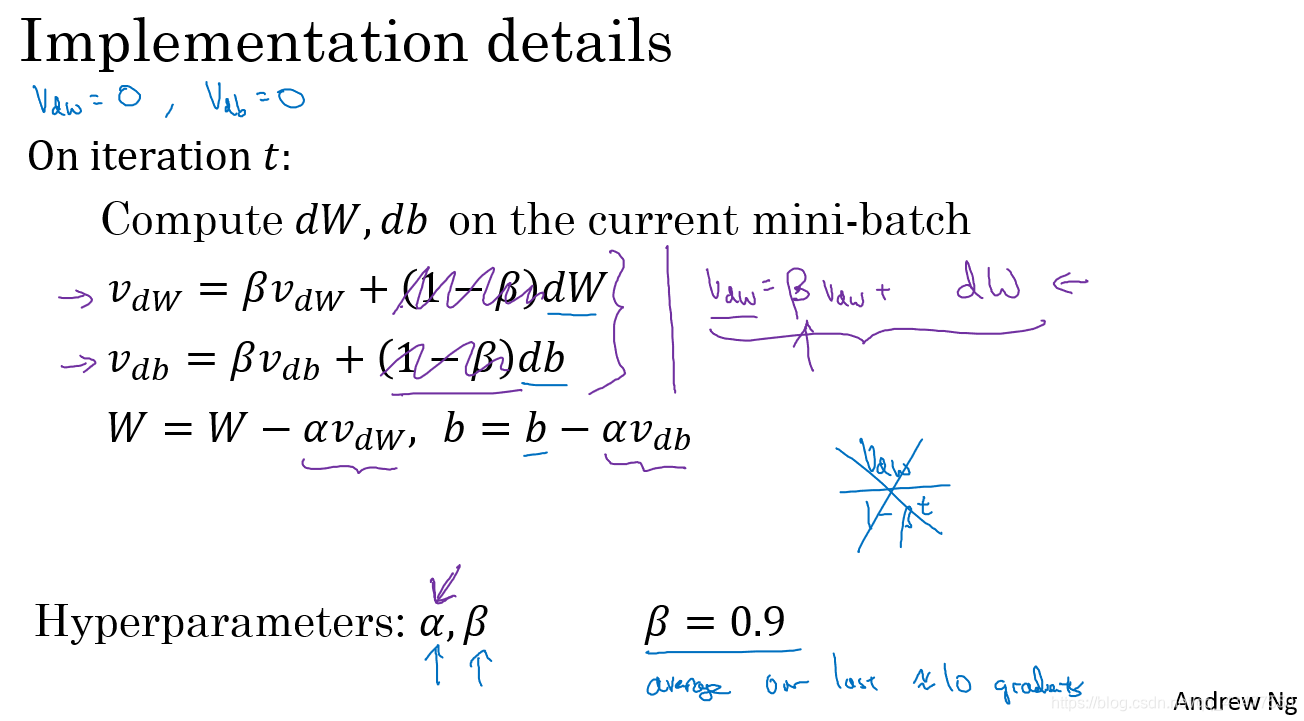
5. Momentum梯度下降法
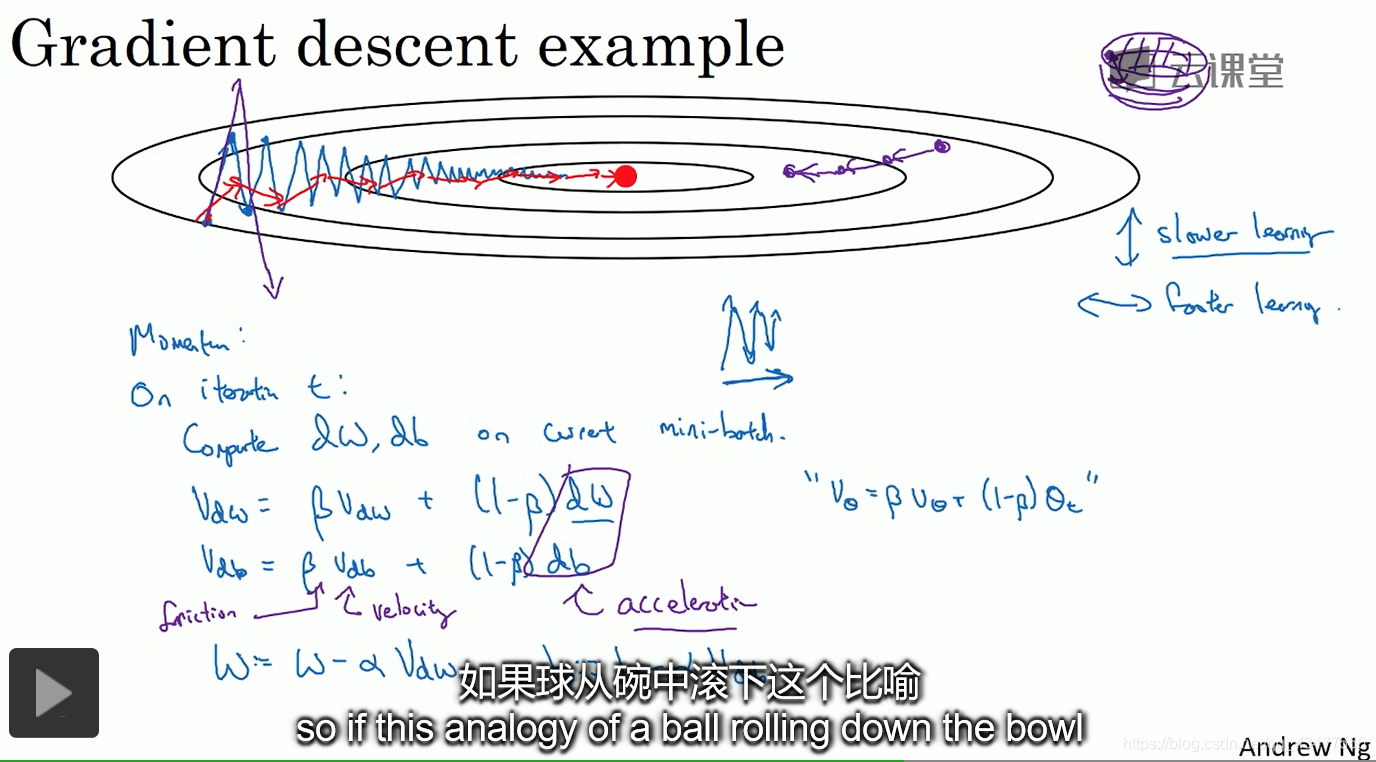
通过指数加权平均,对于纵轴的来回波动可以通过平均相互抵消,从而减缓纵轴的波动,使横轴方向运动更快。
而梯度下降法每次的更新都独立于之前的步骤,因此会随机摆动。
可以将求最小值的过程想象成小球从碗状结构中落到最小值,v相当于速度,β<1相当于摩擦力,防止速度无限增大,dw和db相当于加速度。(v_t=V_0+at)
偏差修正一般不用,因为经过10次迭代后偏差已经消失,无需修正。
- RMSprop (Root Mean Square prop)
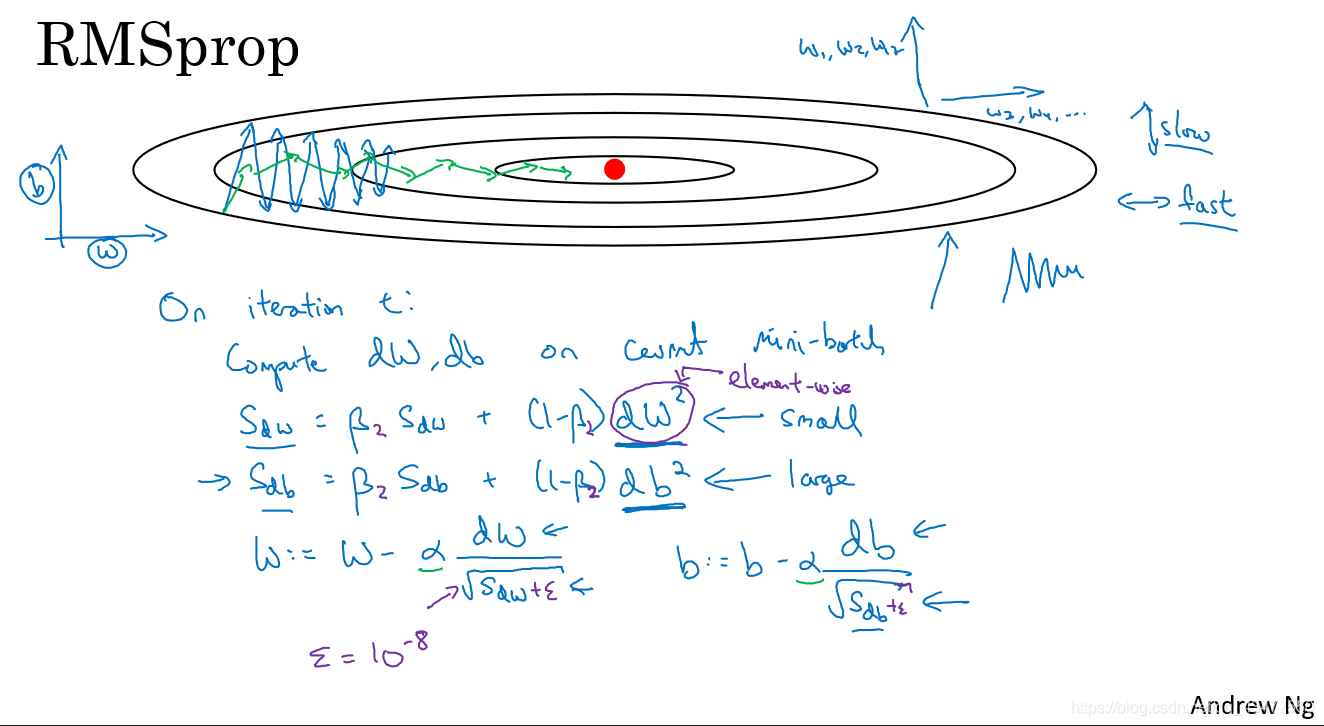
在垂直方向上,梯度db很大,所以S_db也很大,因此除以一个sqrt(S_db)就可以减轻垂直方向上的摆动,而在水平方向上,梯度dw很小,所以S_dw也很小,因此除以一个较小的数可以加快速度。
为了防止分母为0,增加一个ε,可以为e-8. - Adam(Adaptive moment estimation) optimization algorithm
是Momentum和RMSprop的结合
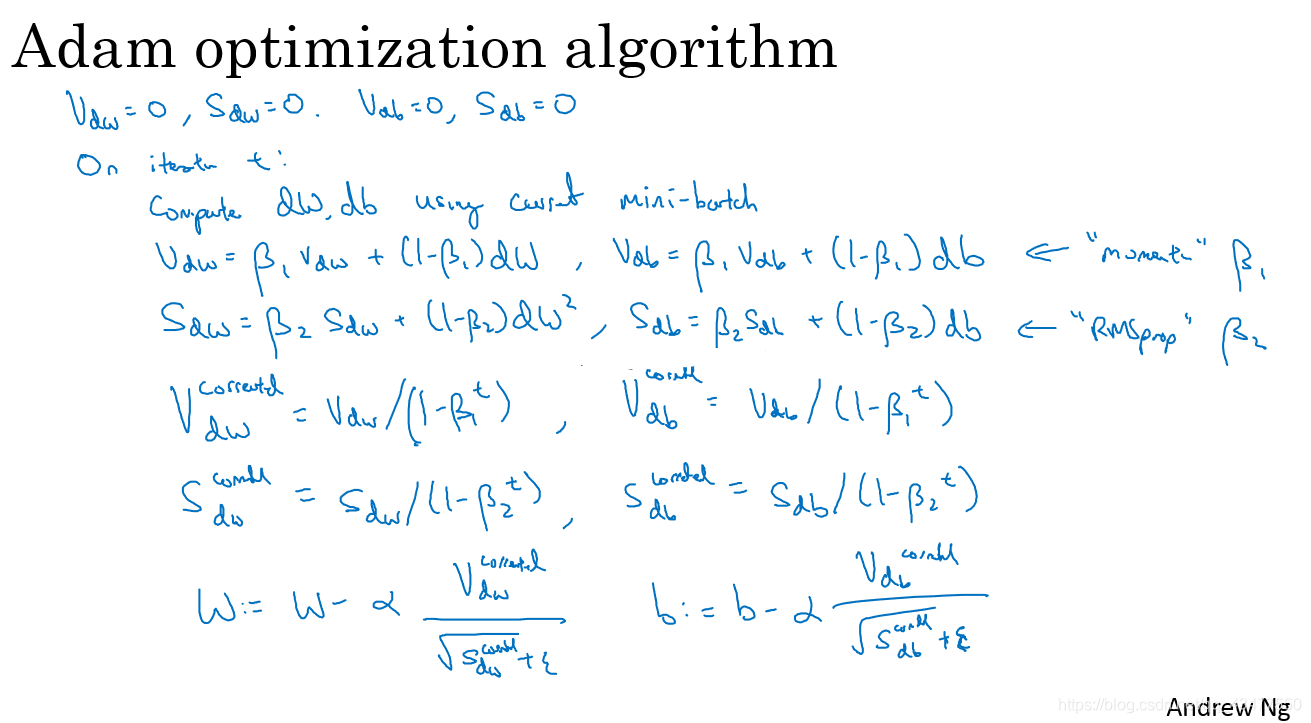
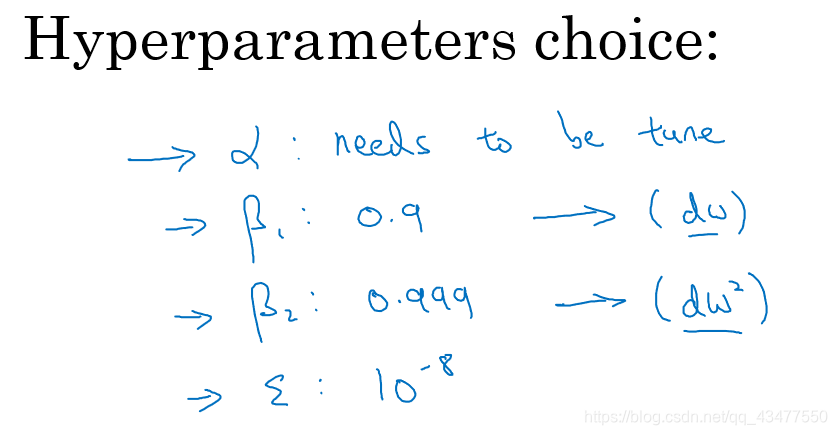
参数的选择
for l in range(L):
# Moving average of the gradients. Inputs: "v, grads, beta1". Output: "v".
v["dW" + str(l+1)] = beta1*v["dW"+str(l+1)] + (1-beta1)*grads["dW"+str(l+1)]
v["db" + str(l+1)] = beta1*v["db"+str(l+1)] + (1-beta1)*grads["db"+str(l+1)]
# Compute bias-corrected first moment estimate. Inputs: "v, beta1, t". Output: "v_corrected".
v_corrected["dW" + str(l+1)] = v["dW"+str(l+1)]/(1-np.power(beta1,t))
v_corrected["db" + str(l+1)] = v["db"+str(l+1)]/(1-np.power(beta1,t))
# Moving average of the squared gradients. Inputs: "s, grads, beta2". Output: "s".
s["dW" + str(l+1)] = beta2*s["dW"+str(l+1)]+(1-beta2)*np.power(grads["dW"+str(l+1)],2)
s["db" + str(l+1)] = beta2*s["db"+str(l+1)]+(1-beta2)*np.power(grads["db"+str(l+1)],2)
# Compute bias-corrected second raw moment estimate. Inputs: "s, beta2, t". Output: "s_corrected".
s_corrected["dW" + str(l+1)] = s["dW"+str(l+1)]/(1-np.power(beta2,t))
s_corrected["db" + str(l+1)] = s["db"+str(l+1)]/(1-np.power(beta2,t))
# Update parameters. Inputs: "parameters, learning_rate, v_corrected, s_corrected, epsilon". Output: "parameters".
parameters["W" + str(l+1)] = parameters["W"+str(l+1)] - learning_rate*v_corrected["dW"+str(l+1)]/(np.sqrt(s_corrected["dW"+str(l+1)])+epsilon)
parameters["b" + str(l+1)] = parameters["b"+str(l+1)] - learning_rate*v_corrected["db"+str(l+1)]/(np.sqrt(s_corrected["db"+str(l+1)])+epsilon)
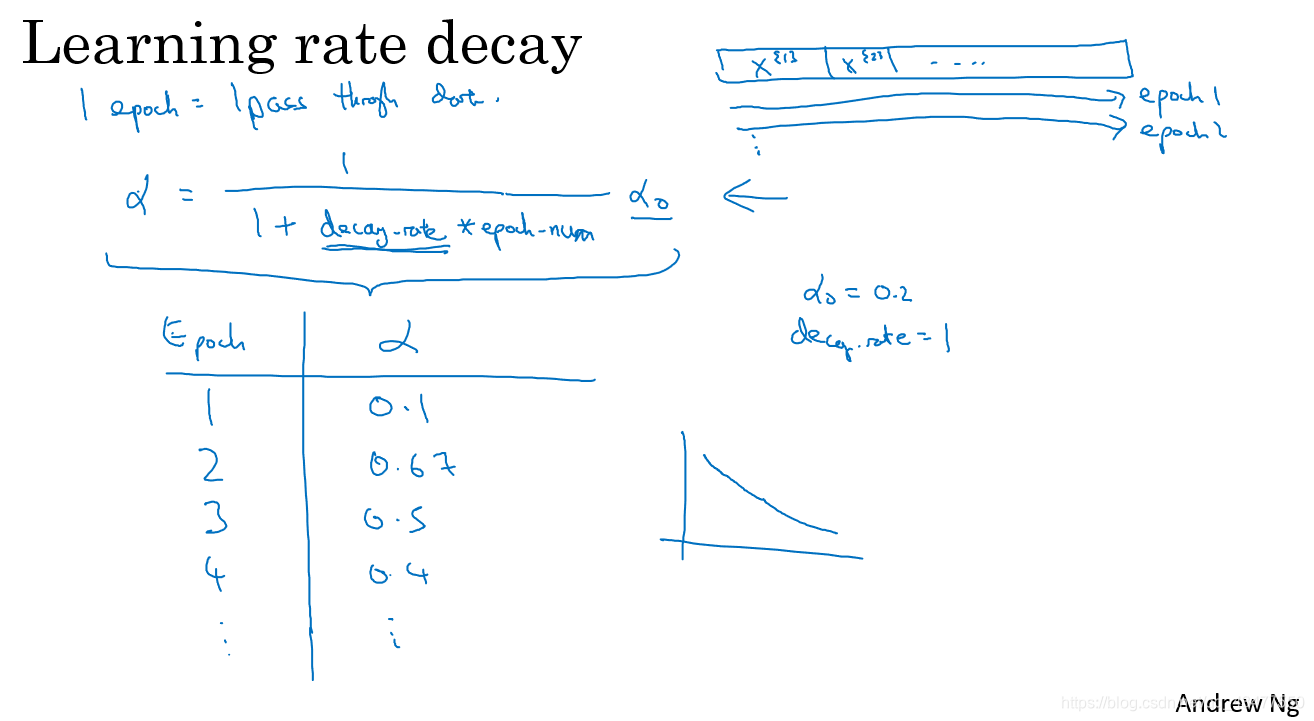
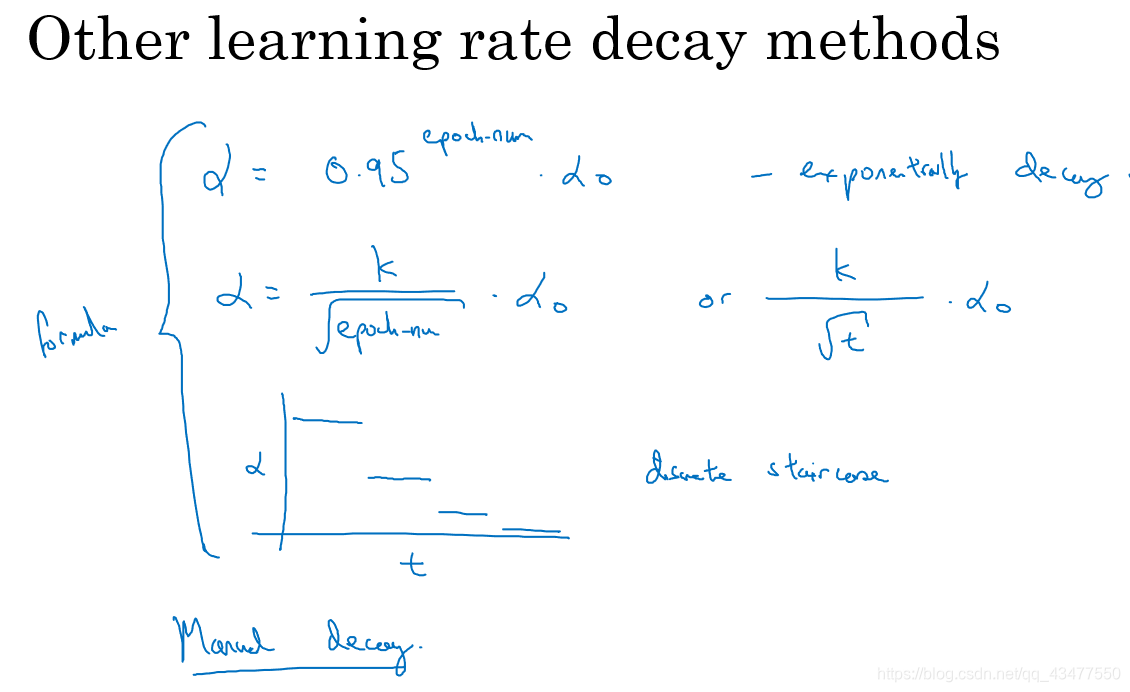
- learning rate decay 学习率衰减
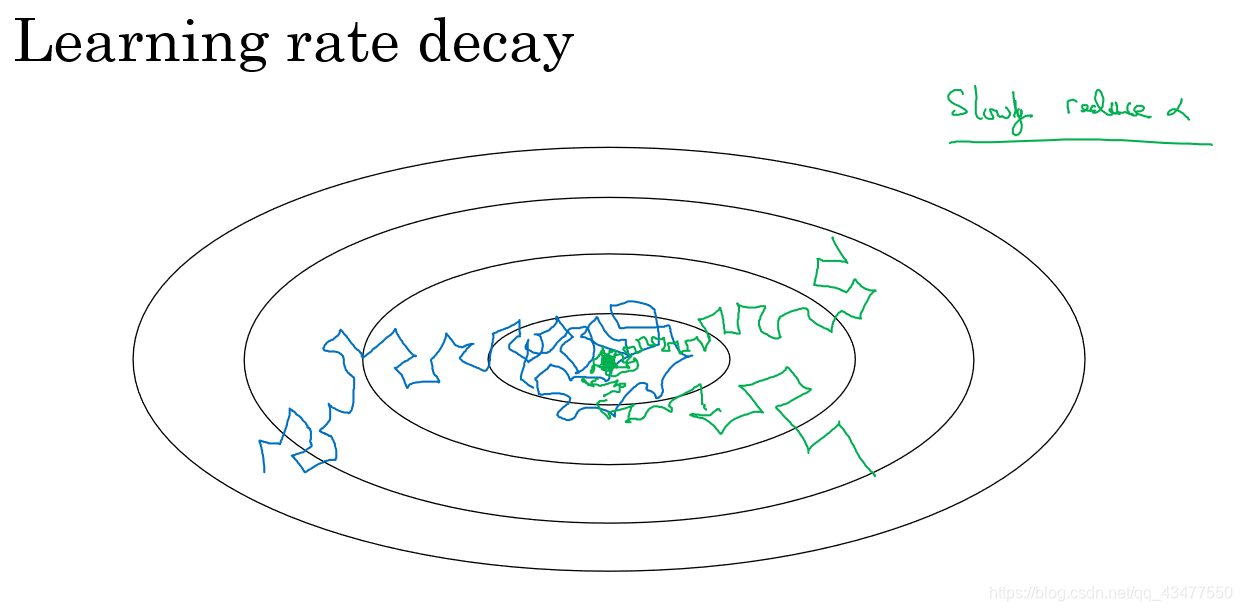
如果学习率是固定值,mini-match有噪音,可能会导致最后在最优值附近徘徊,不会精确收敛,衰减学习率可以减缓迭代速度,使得更新方向朝着最优值逐渐靠近。
几种不同的学习率衰减方法:
- 平稳值

在一段平稳段中,导数长时间接近于0,会使得学习非常缓慢,这些地方更适用于Momentum和Adam等加速学习算法。
在训练较大神经网络时,不太可能被困在极差的局部最优中,因为参数过多。导数为0的点在鞍点。














 1039
1039











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









