







基础知识介绍
- 问题描述
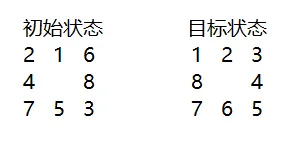
九宫重排问题即八数码问题,是在一个3*3的方格盘上放置1-8八个数字和一个宫格,开始的数字状态随机给出,通过控制空格的上下左右移动实现数字形成有序的或指定的顺序。
- A*算法
A算法与A算法的区别在于A算法使用了启发式搜索而不是盲目搜索,盲目搜索包括广度优先搜索、深度优先搜索等。
- 启发式搜索
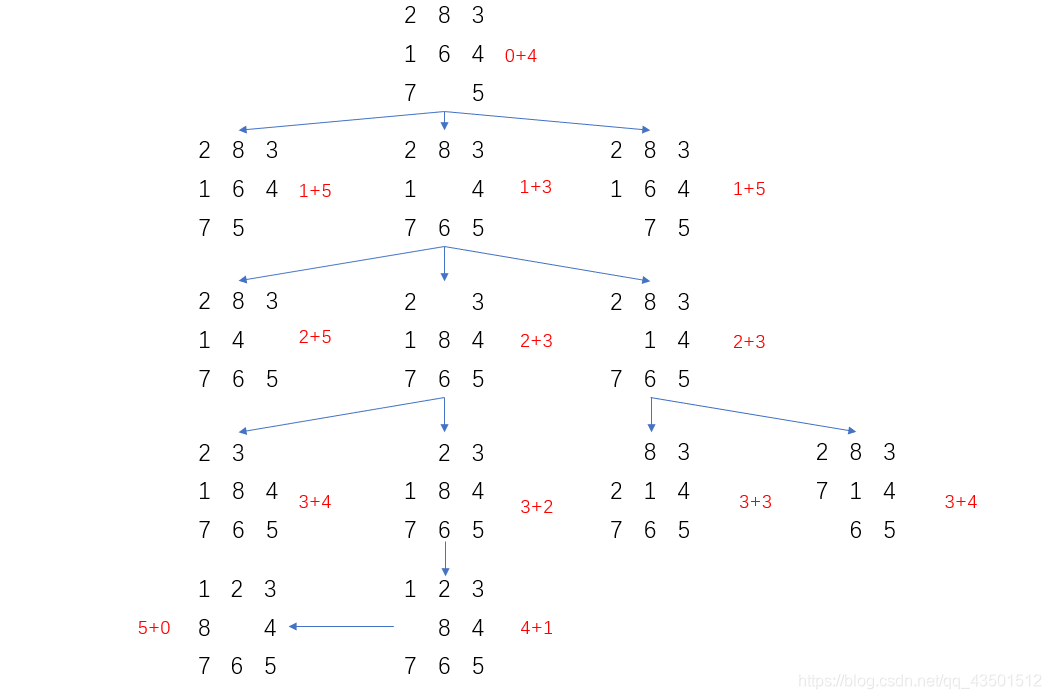
给出了评价函数的定义: f(n) = g(n) + h(n)
其中,n为待评价的节点;g(n)为从初始节点s到节点n的最佳路径耗散值的估计值;h(n)为从节点n到目标节点t的最佳路径耗散值的估计值,称为启发函数;f(n)为从初始节点s经过节点n到达目标节点的最佳路径耗散值的估计值,成为评价函数,我们每次从叶节点选出f(n)最小的节点扩展。如果启发函数满足 h(n) <= h*(n), 则可以证明当问题有解时,A算法一定可以得到一个耗散值最小的结果。
取g(n)为层数,h(n)为不在位的数字的数量
代码说明
- 设置一个变量OPEN用于存放那些搜索图上的叶节点,也就是已经被生成出来,但是还没被扩展的节点;变量CLOSE用于存放图中的非叶节点,也就是不但被生成出来,还已经被扩展的节点。
- OPEN中的节点按照 f 值从小到大排列。每次从OPEN表中取出第一个元素 n 进行扩展,如果 n 是目标节点,则算法找到一个解,算法结束,否则扩展 n
- 对于 n 的子节点 m ,如果 m 既不在OPEN也不在CLOSE, 则将 m 加入OPEN; 如果 m 在CLOSE, 说明从初始节点到 m 有两条路径, 如果新路径耗散值大,什么都不做;如果较小,则将 m (新找到的)从CLOSE中取出放入OPEN中(删除原来在CLOSE的,将新找到的放入OPEN)
- 重复 1 ,知道找到一个解结束;或者OPEN为空算法以失败结束,说明无解
代码内容
C++.代码实现
#include <iostream>
using namespace std;
#define MAXLISTSIZE 10000
#define MAXSTEPSIZE 100
/*
定义八数码节点结构体
status存储节点的状态(即八数码的排列),G存储走的是第几步,H存储不在位的将牌数,F存储总耗散值,Zero存储‘0’将牌所在位置,
step存储该节点是上一节点通过怎样的移动得到的(1左2右3上4下)
*/
struct ENode
{
int status[9];
int G;
int H;
int F;
int Zero;
int step;
ENode *Parent;
};
//最终状态
int FinalStatus[9] = { 1, 2, 3, 8, 0, 4, 7, 6, 5 };
//定义OPEN表和CLOSE表,open和close是表中最后一个内容的下一位序号
ENode OPEN[MAXLISTSIZE];
ENode CLOSE[MAXLISTSIZE];
int open = 0;
int close = 0;
ENode *Node;
/*
计算不在位的将牌数H
返回 H
*/
int CountH(int *status)
{
int H = 0;
int i;
for (i = 0; i <= 8; i++)
{
if (FinalStatus[i] != status[i])
{
H++;
}
}
return H;
}
/*
判断新生成的节点是否已经存在于OPEN表或CLOSE表中
返回 表征是否存在于OPEN或CLOSE的值,值为0 均不在,值>0 只在OPEN表,值<0 只在CLOSE表,|值|-1表示所在列表中的位置
*/
int Exist(ENode *N)
{
int i, j;
int H = 0; //计算不在位的将牌数,如果为0,则证明给函数的节点在表中已存在
int status[9];
Node = new ENode;
Node = N;
for (i = 0; i <= 8; i++)
{
status[i] = Node->status[i];
}
for (i = 0; i <= open - 1; i++) //判断是否在OPEN表
{
for (j = 0; j <= 8; j++)
{
if (status[j] != OPEN[i].status[j])
{
H++;
}
}
if (H == 0) //H=0证明在表中找到该节点
{
return i + 1; //如果在OPEN表中,返回i(节点在OPEN的位置)+ 1(在OPEN找到该节点)
}
H = 0; //扫描完一个节点后重置H
}
for (i = 0; i <= close - 1; i++) //判断是否在CLOSE表
{
for (j = 0; j <= 8; j++)
{
if (status[j] != CLOSE[i].status[j])
{
H++;
}
}
if (H == 0) //H=0证明在表中找到该节点
{
return (-i) - 1; //如果在CLOSE表中,返回-i(i为节点在CLOSE的位置)- 1(在CLOSE找到该节点)
}
H = 0; //扫描完一个节点后重置H
}
return 0;
}
/*
初始化节点
返回 初始化后的节点Node
*/
ENode *ENodeInit(int *status, int zero, int g, ENode *parent, int step)
{
int i;
Node = new ENode;
for (i = 0; i <= 8; i++)
{
Node->status[i] = status[i];
}
Node->Zero = zero;
Node->G = g;
Node->H = CountH(Node->status);
Node->F = Node->G + Node->H;
Node->Parent = parent;
Node->step = step;
return Node;
}
/*
左移后的变化
返回 左移后的状态
*/
int *Left(int *s, int z)
{
int temp, i;
static int status[9];
for (i = 0; i <= 8; i++)
{
status[i] = s[i];
}
temp = status[z - 1];
status[z - 1] = 0;
status[z] = temp;
return status;
}
/*
右移后的变化
返回 右移后的状态
*/
int *Right(int *s, int z)
{
int temp, i;
static int status[9];
for (i = 0; i <= 8; i++)
{
status[i] = s[i];
}
temp = status[z + 1];
status[z + 1] = 0;
status[z] = temp;
return status;
}
/*
上移后的变化
返回 上移后的状态
*/
int *Up(int *s, int z)
{
int temp, i;
static int status[9];
for (i = 0; i <= 8; i++)
{
status[i] = s[i];
}
temp = status[z - 3];
status[z - 3] = 0;
status[z] = temp;
return status;
}
/*
下移后的变化
返回 下移后的状态
*/
int *Down(int *s, int z)
{
int temp, i;
static int status[9];
for (i = 0; i <= 8; i++)
{
status[i] = s[i];
}
temp = status[z + 3];
status[z + 3] = 0;
status[z] = temp;
return status;
}
/*
判断子节点是否在OPEN或CLOSE中,并进行对应的操作
返回值 NULL
*/
void ExistAndOperate(ENode *N)
{
int i;
int inList; //定义表示新生成节点是否在OPEN表或CLOSE表中, 值为0 均不在,值>0 只在OPEN表,值<0 只在CLOSE表
Node = new ENode;
Node = N;
if (Node->G == 1) //如果是第一步的节点,直接加入OPEN中,返回
{
OPEN[open] = *Node;
open++;
return;
}
inList = Exist(Node); //判断新节点是否在OPEN或CLOSE中
if (inList == 0) //如果均不在两个表中,将节点加入OPEN表中
{
OPEN[open] = *Node; //将拓展出的新结点加入到OPEN表中
open++;
}
else if (inList > 0) //如果在OPEN中,说明从初始节点到该节点找到了两条路径,保留耗散值短的那条路径
{
if (OPEN[inList - 1].F > Node->F) //如果表内节点F值大于新节点F值,用新节点代替表内节点
{
OPEN[inList - 1] = *Node;
}
}
else if (inList < 0) //如果在CLOSE中,说明初始节点到该节点有两条路径,如果新找到的路径耗散值大,什么都不做,如果较小,将其从CLOSE中取出放入OPEN中
{
inList = -inList;
if (CLOSE[inList - 1].F > Node->F) //如果较小
{
OPEN[open] = *Node; //将其取出放入OPEN
open++;
}
for (i = inList - 1; i <= close - 1; i++) //将其在CLOSE中释放
{
CLOSE[i] = CLOSE[i + 1];
}
close--;
}
}
/*
寻找最佳路径函数
返回 最后的节点Node
*/
ENode *Search()
{
int *status;
int i, j;
ENode *Temp;
while (1) //一直循环知道找到解结束
{
Temp = new ENode;
for (i = open - 1; i > 0; i--) //用冒泡排序给OPEN表里面的节点按耗散值进行排序
{
for (j = 0; j < i; j++)
{
if (OPEN[j].F > OPEN[j + 1].F)
{
*Temp = OPEN[j + 1];
OPEN[j + 1] = OPEN[j];
OPEN[j] = *Temp;
}
}
}
Node = new ENode;
*Node = OPEN[0]; //从OPEN表中取出第一个元素(F值最小)进行扩展
if (!CountH(Node->status)) //判断该节点是否是目标节点,若是,则不在位的将牌数为0,算法结束
{
break;
}
Temp = Node;
CLOSE[close] = *Node; //将扩展过的节点放入CLOSE
close++;
for (i = 0; i <= open - 1; i++) //将扩展的节点从OPEN中释放
{
OPEN[i] = OPEN[i + 1];
}
open--;
if ((Temp->Zero) % 3 >= 1) //如果能左移,则进行左移创造新结点
{
Node = new ENode; //创造新结点
status = Left(Temp->status, Temp->Zero); //得到新的状态
Node = ENodeInit(status, Temp->Zero - 1, (Temp->G) + 1, Temp, 1); //初始化新结点
ExistAndOperate(Node); //判断子节点是否在OPEN或CLOSE中,并进行对应的操作
}
if ((Temp->Zero) % 3 <= 1) //如果能右移,则进行右移创造新结点
{
Node = new ENode; //创造新结点
status = Right(Temp->status, Temp->Zero); //得到新的状态
Node = ENodeInit(status, Temp->Zero + 1, (Temp->G) + 1, Temp, 2); //初始化新结点
ExistAndOperate(Node); //判断子节点是否在OPEN或CLOSE中,并进行对应的操作
}
if (Temp->Zero >= 3) //如果能上移,则进行上移创造新结点
{
Node = new ENode; //创造新结点
status = Up(Temp->status, Temp->Zero); //得到新的状态
Node = ENodeInit(status, Temp->Zero - 3, (Temp->G) + 1, Temp, 3); //初始化新结点
ExistAndOperate(Node); //判断子节点是否在OPEN或CLOSE中,并进行对应的操作
}
if (Temp->Zero <= 5) //如果能下移,则进行下移创造新结点
{
Node = new ENode; //创造新结点
status = Down(Temp->status, Temp->Zero); //得到新的状态
Node = ENodeInit(status, Temp->Zero + 3, (Temp->G) + 1, Temp, 4); //初始化新结点
ExistAndOperate(Node); //判断子节点是否在OPEN或CLOSE中,并进行对应的操作
}
if (open == 0) //如果open=0, 证明算法失败, 没有解
return NULL;
}
return Node;
}
/*
展示具体步骤
返回 NULL
*/
void ShowStep(ENode *Node)
{
int STEP[MAXSTEPSIZE];
int STATUS[MAXSTEPSIZE][9];
int step = 0;
int i, j;
int totalStep = Node->G;
while (Node)
{
STEP[step] = Node->step;
for (i = 0; i <= 8; i++)
{
STATUS[step][i] = Node->status[i];
}
step++;
Node = Node->Parent;
}
cout << "----------------------" << endl;
cout << totalStep << endl;
cout << "----------------------" << endl;
for (i = step - 1; i >= 0; i--)
{
if (STEP[i] == 1)
cout << "left";
else if (STEP[i] == 2)
cout << "right";
else if (STEP[i] == 3)
cout << "up";
else if (STEP[i] == 4)
cout << "down";
else if (STEP[i] == 0)
cout << "START";
cout << " ";
}
cout << endl << "----------------------" << endl;
for (i = step - 1; i >= 0; i--)
{
for (j = 0; j <= 8; j++)
{
cout << STATUS[i][j];
if (j == 2 || j == 5 || j == 8)
cout << endl;
else
cout << " ";
}
cout << "----------------------" << endl;
}
}
/*
主函数
返回 0
*/
int main()
{
int fstatus[9];
int i;
ENode *FNode;
ENode *EndNode;
for (i = 0; i <= 8; i++) //输入初始状态
{
cin >> fstatus[i];
}
for (i = 0; i <= 8; i++) //判断0节点位置
{
if (fstatus[i] == 0)
break;
}
FNode = ENodeInit(fstatus, i, 0, NULL, 0); //获得初始节点
OPEN[open] = *FNode; //将初始节点放入OPEN中
open++;
EndNode = Search(); //寻找最佳路径
if (!EndNode)
cout << "无解" << endl;
else
ShowStep(EndNode); //展示步骤
return 0;
}
效果截图
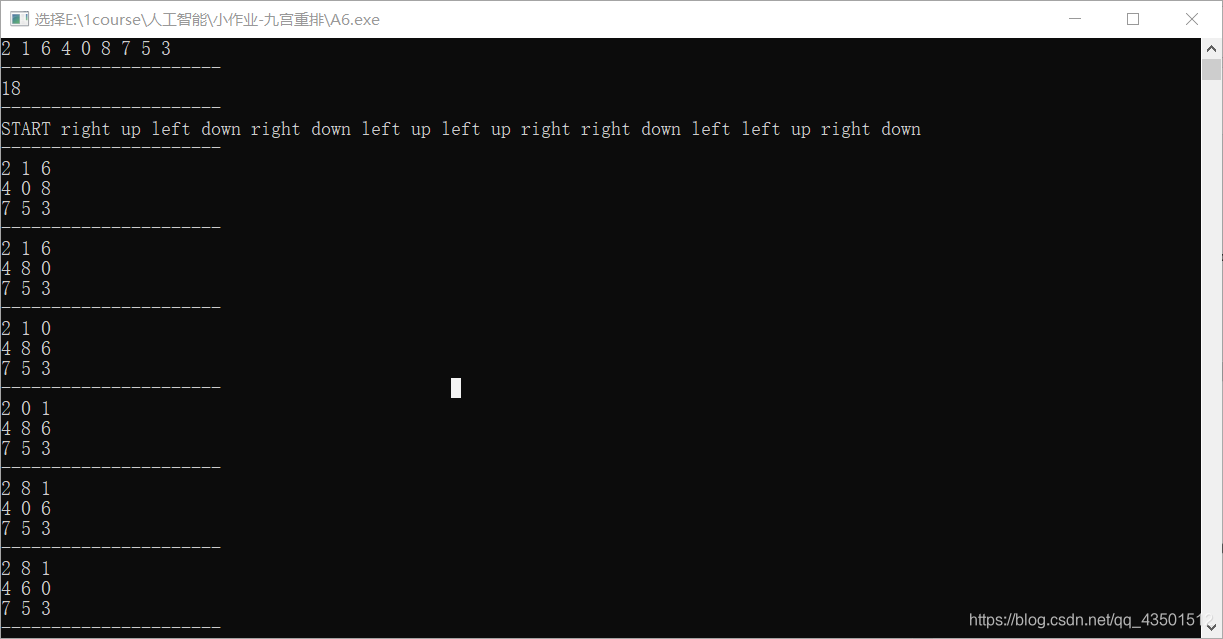
第一行是输入内容是目前的棋盘状态,每一个数字之间用空格隔开,棋盘上的空格用0表示
第二行是输出内容,是走的最少的步数
第三行是输出的操作,start后是显示的是上下左右的集中操作
剩余展示的每走一步之后的状态
转载借鉴声明
本文借鉴https://www.codenong.com/cs105897291/,代码摘自上篇内容,为了有更好的理解,所以写此篇内容,如有侵权,联系删除,感谢上述博主的分享。

















 1659
1659

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









